







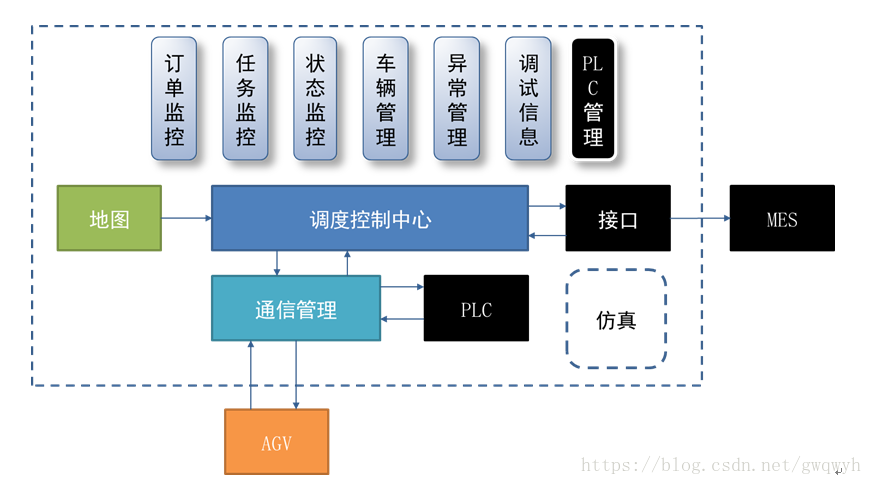
一、系统架构
本系统主要与公司的AGV硬件设备配合使用,系统核心模块如下图:
二、功能介绍
功能比较多,主要介绍下核心功能
1,地图设计
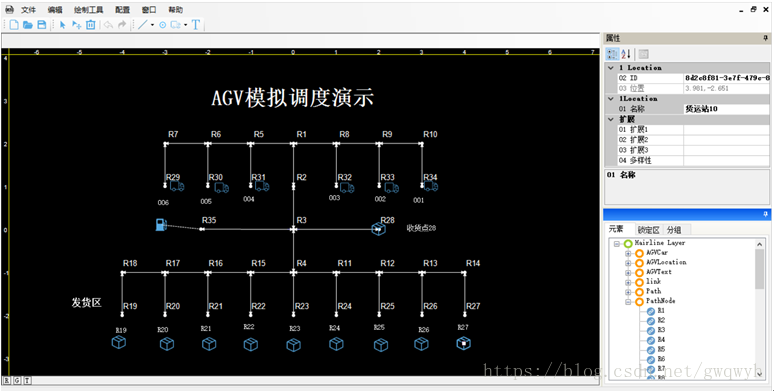
这是AGV调度系统的基本功能。
l 根据现场情况,动态设计及调整地图,实现地图的定制。
l 可以维护行驶速度、倒车速度、是否锁定等扩展属性。给路线增加方向属性,给路线增加方位属性,以便处理AGV转弯。
l 客户维护定义车辆型号、长度、路线颜色、电量、报警值、速度、状态等属性。
l 可以将CAD图纸导入,更能真是体现现场布局。
2,任务执行及仿真
除正常运行外,增加了仿真功能。用于模拟实际的运行效果,查看交互指令,评估运行效率等。
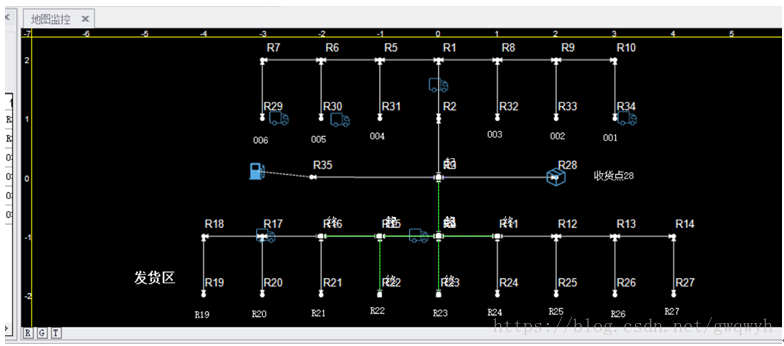
l 实时展示车辆的运行状态,查看行驶轨迹。
l 能够查看车辆的整体运行路线,了解路线规划状态。
l 优化的调度算法,能够根据路线长度、车辆速度等预估路线占用时间、释放时间。
l 采用同向不锁定、异向锁定、整条锁定、边走边释放等规则。提高路线的使用效率。
l 实时输出运行指令,了解与AGV的实际交互过程。
3,状态输出
作为调度系统,期望能将系统运行过程中的各项参数、代码输出出来,以便查看。
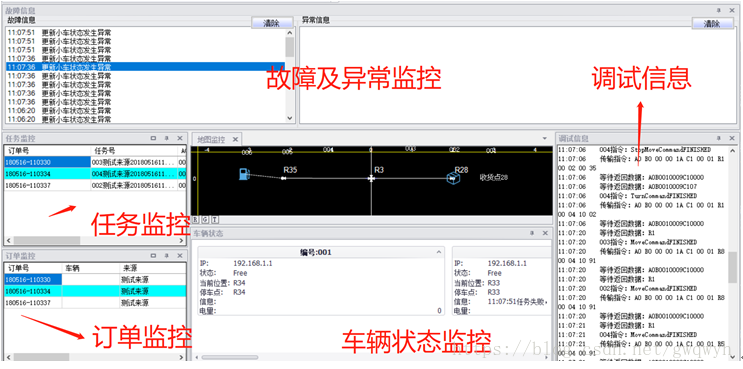
l 订单监控:监控仿真及实际订单的执行状态。
l 任务监控:查看AGV的任务执行情况。
l 故障及异常监控:监控当前系统出现的异常信息及故障信息。
l 车辆状态监控:实时反馈车辆的运行状态、停车点、电量信息等。
l 调试信息:输出与AGV交互的各种通信协议、指令,便于仿真及实际运行时查看运行过程及故障排除。
l 以上监控信息同时应用于实际运行与仿真运行。
4,任务统计
统计AGV运行效率
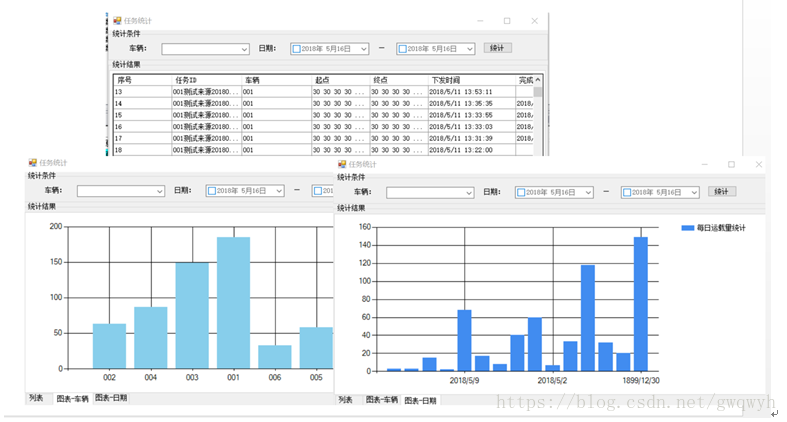
l 按列表,统计每天执行的具体任务。
l 按柱状图,统计车辆的运载状况
l 按柱状图,统计每天的运载状况。
5,云监控
AGV运行状态、故障、电量、等各种信息,可以上传到云,以便远程调试、诊断。


















 1987
1987

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









