









- 几何形状识别(识别三角形、四边形/矩形、多边形、圆)
- 计算几何形状面积与周长、中心位置
-
提取几何形状的颜色
在具体代码实现与程序演示之前,我们先要搞清楚一些概念。
一:基本概念与函数介绍
1. 轮廓(contours)
什么是轮廓,简单说轮廓就是一些列点相连组成形状、它们拥有同样的颜色、轮廓发现在图像的对象分析、对象检测等方面是非常有用的工具,在OpenCV中使用轮廓发现相关函数时候要求输入图像是二值图像,这样便于轮廓提取、边缘提取等操作。轮廓发现的函数与参数解释如下:
findContours(image, mode, method, contours=None, hierarchy=None, offset=None)
- image输入/输出的二值图像
- mode 迒回轮廓的结构、可以是List、Tree、External
- method 轮廓点的编码方式,基本是基于链式编码
- contours 迒回的轮廓集合
- hieracrchy 迒回的轮廓层次关系
- offset 点是否有位移2. 多边形逼近
多边形逼近,是通过对轮廓外形无限逼近,删除非关键点、得到轮廓的关键点,不断逼近轮廓真实形状的方法,OpenCV中多边形逼近的函数与参数解释如下:
approxPolyDP(curve, epsilon, closed, approxCurve=None)
- curve 表示输入的轮廓点集合
- epsilon 表示逼近曲率,越小表示相似逼近越厉害
- close 是否闭合3. 几何距计算
图像几何距是图像的几何特征,高阶几何距中心化之后具有特征不变性,可以产
生Hu距输出,用于形状匹配等操作,这里我们通过计算一阶几何距得到指定轮廓的中心位置,计算几何距的函数与参数解释如下:
moments(array, binaryImage=None)
- array表示指定输入轮廓
- binaryImage默认为None二:代码实现与演示
整个代码实现分为如下几步完成
- 加载图像,
- 图像二值化
- 轮廓发现
- 几何形状识别
- 测量周长、面积、计算中心
- 颜色提取
完整的源代码如下:
####################################################
# 作者:zhigang,
####################################################
import cv2 as cv
import numpy as np
class ShapeAnalysis:
def __init__(self):
self.shapes = {'triangle': 0, 'rectangle': 0, 'polygons': 0, 'circles': 0}
def analysis(self, frame):
h, w, ch = frame.shape
result = np.zeros((h, w, ch), dtype=np.uint8)
# 二值化图像
print("start to detect lines...\n")
gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY)
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU)
cv.imshow("input image", frame)
out_binary, contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
for cnt in range(len(contours)):
# 提取与绘制轮廓
cv.drawContours(result, contours, cnt, (0, 255, 0), 2)
# 轮廓逼近
epsilon = 0.01 * cv.arcLength(contours[cnt], True)
approx = cv.approxPolyDP(contours[cnt], epsilon, True)
# 分析几何形状
corners = len(approx)
shape_type = ""
if corners == 3:
count = self.shapes['triangle']
count = count+1
self.shapes['triangle'] = count
shape_type = "三角形"
if corners == 4:
count = self.shapes['rectangle']
count = count + 1
self.shapes['rectangle'] = count
shape_type = "矩形"
if corners >= 10:
count = self.shapes['circles']
count = count + 1
self.shapes['circles'] = count
shape_type = "圆形"
if 4 < corners < 10:
count = self.shapes['polygons']
count = count + 1
self.shapes['polygons'] = count
shape_type = "多边形"
# 求解中心位置
mm = cv.moments(contours[cnt])
cx = int(mm['m10'] / mm['m00'])
cy = int(mm['m01'] / mm['m00'])
cv.circle(result, (cx, cy), 3, (0, 0, 255), -1)
# 颜色分析
color = frame[cy][cx]
color_str = "(" + str(color[0]) + ", " + str(color[1]) + ", " + str(color[2]) + ")"
# 计算面积与周长
p = cv.arcLength(contours[cnt], True)
area = cv.contourArea(contours[cnt])
print("周长: %.3f, 面积: %.3f 颜色: %s 形状: %s "% (p, area, color_str, shape_type))
cv.imshow("Analysis Result", self.draw_text_info(result))
cv.imwrite("D:/test-result.png", self.draw_text_info(result))
return self.shapes
def draw_text_info(self, image):
c1 = self.shapes['triangle']
c2 = self.shapes['rectangle']
c3 = self.shapes['polygons']
c4 = self.shapes['circles']
cv.putText(image, "triangle: "+str(c1), (10, 20), cv.FONT_HERSHEY_PLAIN, 1.2, (255, 0, 0), 1)
cv.putText(image, "rectangle: " + str(c2), (10, 40), cv.FONT_HERSHEY_PLAIN, 1.2, (255, 0, 0), 1)
cv.putText(image, "polygons: " + str(c3), (10, 60), cv.FONT_HERSHEY_PLAIN, 1.2, (255, 0, 0), 1)
cv.putText(image, "circles: " + str(c4), (10, 80), cv.FONT_HERSHEY_PLAIN, 1.2, (255, 0, 0), 1)
return image
if __name__ == "__main__":
src = cv.imread("D:/javaopencv/gem_test.png")
ld = ShapeAnalysis()
ld.analysis(src)
cv.waitKey(0)
cv.destroyAllWindows()原图
运行结果: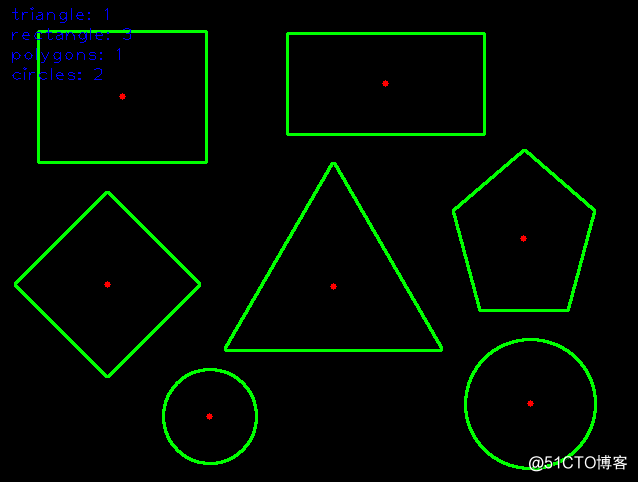
控制台输出: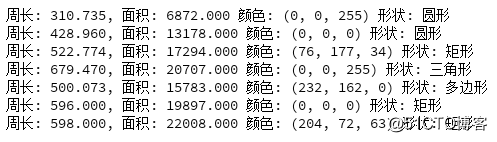














 247
247











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









