






一、接线布局以及开发环境
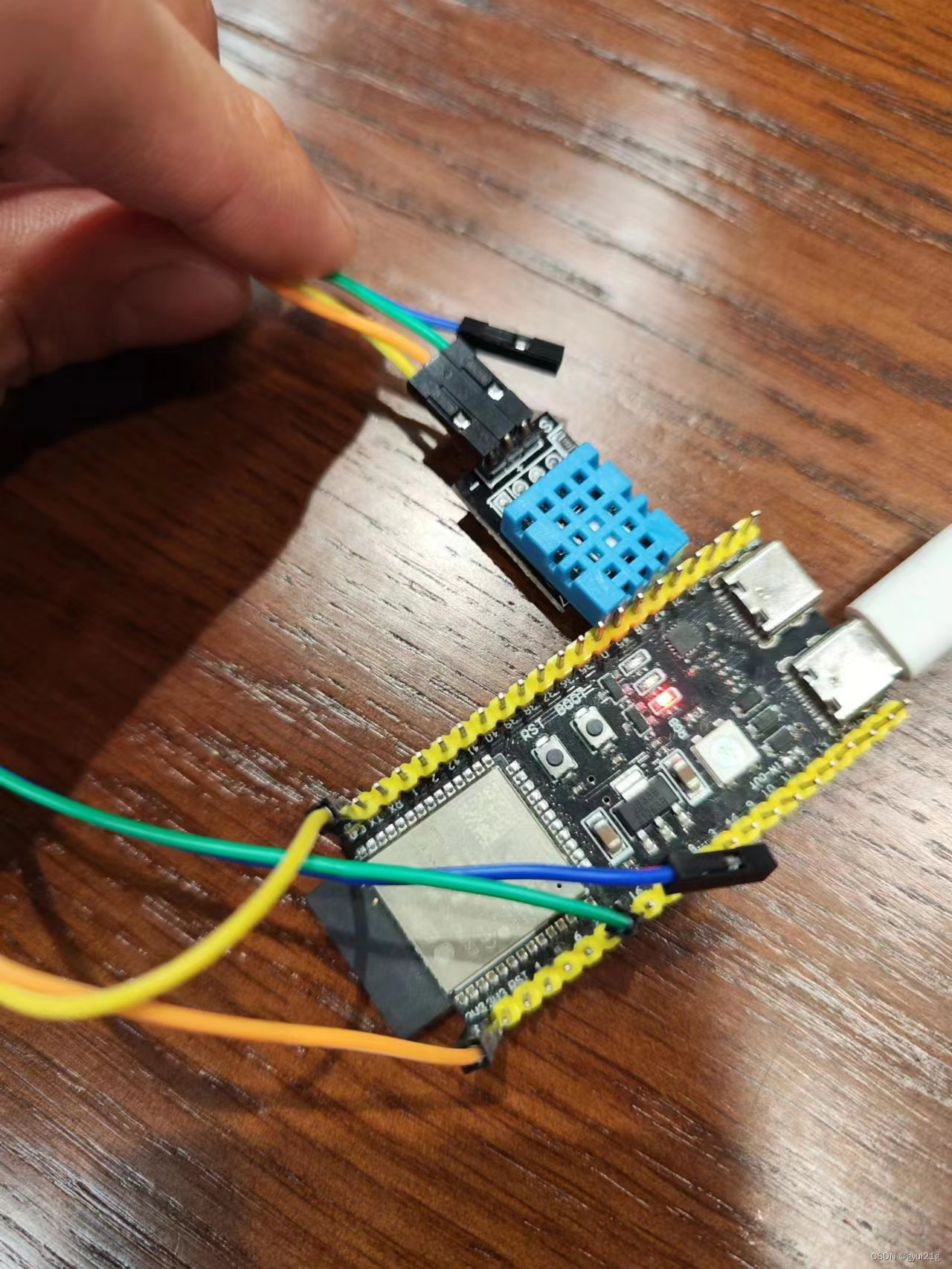
硬件:ESP32-S3,DHT11模块(三线和四线一样,这个模块自带上拉电阻10kΩ)
接线:DHT11模块正负极连电源正负极,最好是3.3v,因为模块自带了上拉电阻。ESP32上随便找个引脚(我用引脚15)连DHT11的S脚。
开发环境:ESP-IDF,VSCODE。
二、DHT11模块原理
单总线通讯原理,非常好理解。主从双方都是既输出又输入,不过启动信号是主机发起。识别0、1靠高电平时间长短。一次固定传输40bits,总用时大概4.5ms。
模块难点是时间单位用us,微秒,并且时间容错较低,2us左右出入都有可能通信失败。
模块能检测湿度和温度信号,使用3.3v或5v电源都行。
ESP32引脚开启上拉电阻和OD(开漏)输出。
三、上传源代码
#include <string.h>
#include <freertos/FreeRTOS.h>
#include <freertos/task.h>
#include "driver/gpio.h"
#include <esp_log.h>
#include "esp_timer.h"
#include "esp_rom_sys.h"
#define DHT11_GPIO 15 // DHT11引脚定义
const static char *TAG = "DHT11";
// 温度 湿度buffer
uint8_t buffer[5];
int64_t phase_duration[3]={0};
int64_t bit_duration_low[40]={0};
int64_t bit_duration_high[40]={0};
// DHT11 初始化引脚,等待1s上电时间
void DHT11_Init()
{
gpio_config_t cnf={
.mode = GPIO_MODE_OUTPUT_OD,
.pin_bit_mask = 1ULL<<DHT11_GPIO,
.pull_up_en=1,
};
gpio_config(&cnf);
vTaskDelay(1200/portTICK_PERIOD_MS);
}
/*
timeout单位是us
*/
esp_err_t wait_pin_state(uint32_t timeout, int expected_pin_state)
{
/*用这段固定时间的代码也可以*/
// esp_rom_delay_us(timeout);
// if(gpio_get_level(DHT11_GPIO)==expected_pin_state)
// return ESP_OK;
// else
// return ESP_FAIL;
/*建议用这段代码*/
int64_t start_time;
start_time=esp_timer_get_time();
while(esp_timer_get_time()-start_time<=timeout)
{
if(gpio_get_level(DHT11_GPIO)==expected_pin_state)
return ESP_OK;
esp_rom_delay_us(1);
}
return ESP_FAIL;
}
esp_err_t DataRead()
{
int64_t time_since_waiting_start;
esp_err_t result=ESP_FAIL;
memset(buffer,0,sizeof(buffer));
gpio_set_direction(DHT11_GPIO,GPIO_MODE_OUTPUT_OD);
gpio_set_level(DHT11_GPIO,1);
vTaskDelay(2000/portTICK_PERIOD_MS);
gpio_set_level(DHT11_GPIO,0);
vTaskDelay(25/portTICK_PERIOD_MS);
gpio_set_level(DHT11_GPIO,1);
time_since_waiting_start=esp_timer_get_time();
gpio_set_direction(DHT11_GPIO,GPIO_MODE_INPUT);
result=wait_pin_state(19,0); //
if(result == ESP_FAIL)
{
ESP_LOGE(TAG, "Phase A Fail, slave not set LOW.");
return ESP_FAIL;
}
phase_duration[0]=esp_timer_get_time()-time_since_waiting_start;
time_since_waiting_start=esp_timer_get_time();
/*等从机拉低总线83us,再拉高87us*/
result=wait_pin_state(80,1);
if (result == ESP_FAIL)
{
ESP_LOGE(TAG, "Phase B Fail, slave not set HIGH.");
return ESP_FAIL;
}
phase_duration[1]=esp_timer_get_time()-time_since_waiting_start;
time_since_waiting_start=esp_timer_get_time();
result = wait_pin_state(80, 0);
if (result == ESP_FAIL)
{
ESP_LOGE(TAG, "Phase C Fail, slave not set LOW to start sending.");
return ESP_FAIL;
}
phase_duration[2]=esp_timer_get_time()-time_since_waiting_start;
time_since_waiting_start=esp_timer_get_time();
for(int j=0;j<5;j++)
{
for(int i =0;i<8;i++)
{
/*数位低电平时间*/
while(gpio_get_level(DHT11_GPIO)==0)
{
esp_rom_delay_us(1);
}
bit_duration_low[j*8+i]=esp_timer_get_time()-time_since_waiting_start;
/*检测数字高位的时间长度来判断是1或0*/
time_since_waiting_start=esp_timer_get_time();
do
{
if (gpio_get_level(DHT11_GPIO) == 0)
{
if (esp_timer_get_time() - time_since_waiting_start > 40)
{
/*数字1*/
buffer[j] = buffer[j] | (1U << (7 - i));
/*数字0不用处理*/
}
bit_duration_high[j*8+i]=esp_timer_get_time()-
time_since_waiting_start;
time_since_waiting_start=esp_timer_get_time();
break;
}
} while (esp_timer_get_time() - time_since_waiting_start < 74);
}
}
result=wait_pin_state(56,1);
if (result == ESP_FAIL)
{
ESP_LOGE(TAG, "Data is all read.But CAN not set high.");
return ESP_FAIL;
}
return ESP_OK;
}
// 主函数
void app_main(void)
{
esp_err_t result;
uint8_t i,j;
DHT11_Init();
while(1)
{
memset(phase_duration,0,sizeof(phase_duration));
memset(bit_duration_low,0,sizeof(bit_duration_low));
memset(bit_duration_high,0,sizeof(bit_duration_high));
result = DataRead();
if (result==ESP_OK)
{
ESP_LOGI(TAG,"Reading data succeed.");
if(((buffer[0]+buffer[1]+buffer[2]+buffer[3])&0xFF) != buffer[4])
ESP_LOGE(TAG, "But checksum error.");
ESP_LOGI(TAG, "Temperature is:%d.%d, Humidity is:%d.%d", buffer[2], buffer[3], buffer[0],buffer[1]);
}
ESP_LOGI(TAG,"PhaseA duration is:%lld",phase_duration[0]);
ESP_LOGI(TAG,"PhaseB duration is:%lld",phase_duration[1]);
ESP_LOGI(TAG,"PhaseC duration is:%lld",phase_duration[2]);
ESP_LOGI(TAG,"Bit duration is as follows:");
for(j=0;j<5;j++)
{
for(i=0;i<8;i++)
{
printf("%lld,%lld-",bit_duration_low[j*8+i],bit_duration_high[j*8+i]);
}
printf("\n");
}
}
}
每隔2秒左右输出结果如下:
2024-04-26 16:37:44 I (926424) DHT11: Reading data succeed.
2024-04-26 16:37:44 I (926424) DHT11: Temperature is:26.1, Humidity is:71.2
2024-04-26 16:37:44 I (926424) DHT11: PhaseA duration is:19
2024-04-26 16:37:44 I (926424) DHT11: PhaseB duration is:79
2024-04-26 16:37:44 I (926434) DHT11: PhaseC duration is:79
2024-04-26 16:37:44 I (926434) DHT11: Bit duration is as follows:
2024-04-26 16:37:44 51,27-49,72-50,25-51,25-51,25-50,72-50,71-51,73-
2024-04-26 16:37:44 51,25-50,25-51,25-51,25-50,26-50,25-51,70-51,28-
2024-04-26 16:37:44 51,25-50,26-50,25-51,72-49,72-50,25-51,70-51,28-
2024-04-26 16:37:44 51,25-50,25-51,25-51,25-51,25-49,25-50,26-50,74-
2024-04-26 16:37:44 51,25-51,70-51,71-51,25-49,26-49,71-49,25-51,25-我将40位bit的时间高低都打印出来了,51,27表示低位持续51us,高位持续27us,这两段表示一个bit数字0。
四、聊一些体会
这个DHT11难点是调用ESP32的微秒级计时器。在通讯过程千万不能用ESP_LOGI()这类打印函数,安插了这类打印函数在通信中途试图看时间点,试了很多次都通信失败,发现调用一次这个打印函数耗时2000多us.....
vTaskDelay()这种是Freertos控制的定时器,依赖软系统,而Freertos的sys_tick默认是100ms,最低也只能设置到1ms,意思是Freertos对后台控制切换的精度最高是1毫秒一次,而我们要求精度去到微秒,因此不能用vtaskdelay(),要用硬件定时器的esp_timer_get_time()。
试了很多次都是无法检测Phase A下降沿、读取40bit过程无法检测上拉电位等等,怀疑过是硬件线路搭建错误比如上拉电位达不到,也怀疑过是系统定时不够精确。经实验,系统硬件定时足够精确到1us。用示波器检查结果如下:
主机拉高保持18us,从机第一次拉低。
从机低电平保持80us,拉高。
从机高电平保持80us,拉低。
***下面开始发送数据bit***
从机低电平50us,拉高
从机高电平26us,拉低 信号0
从机低电平50us,拉高
从机高电平70us,拉低 信号1
从机低电平52us,拉高
从机高电平26us,拉低 信号0
从机低电平50us,拉高
从机高电平24us,拉低 信号0
从机低电平50us,拉高
从机高电平26us,拉低 信号0
***数据发送完毕***
从机低电平保持52us,拉高,完成一次传输原来这个模块的时间间隔与芯片手册描述的间隔有出入。















 2307
2307











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









