






已经升级,市面上最多的,7,,8,9,10伺服口罩机通用程序架构,程序已经升级,程序高度模块化,可轻易拓展十几二十多个轴,已经很成功的运用到大量口罩机机器上面去了,plc是目前性价比最高的方案,采用信捷xd560t10 60个点10轴高速脉冲输出,走s形,正弦曲线加减速,让你的运动控制更柔性
ID:943634192355109
l2019112
标题:市面上最先进的7、8、9、10轴伺服口罩机通用程序架构介绍
摘要:本文介绍了市面上最先进的7、8、9、10轴伺服口罩机通用程序架构。该程序架构采用了高度模块化设计,具备良好的可拓展性,已成功应用于大量口罩机机器上。其中,PLC采用了性价比最高的信捷XD560T10模块,该模块具备60个点10轴高速脉冲输出功能,可实现S形、正弦曲线加减速,从而使运动控制更加柔性。
-
引言
随着全球疫情的爆发,对口罩需求的迅速增加,口罩机市场也得到了前所未有的发展。然而,市场上存在着各种不同轴数的伺服口罩机,其程序架构的通用性和拓展性成为了当前急需解决的问题。为此,本文提出了一种7、8、9、10轴伺服口罩机通用程序架构,以满足市场需求。 -
程序架构设计
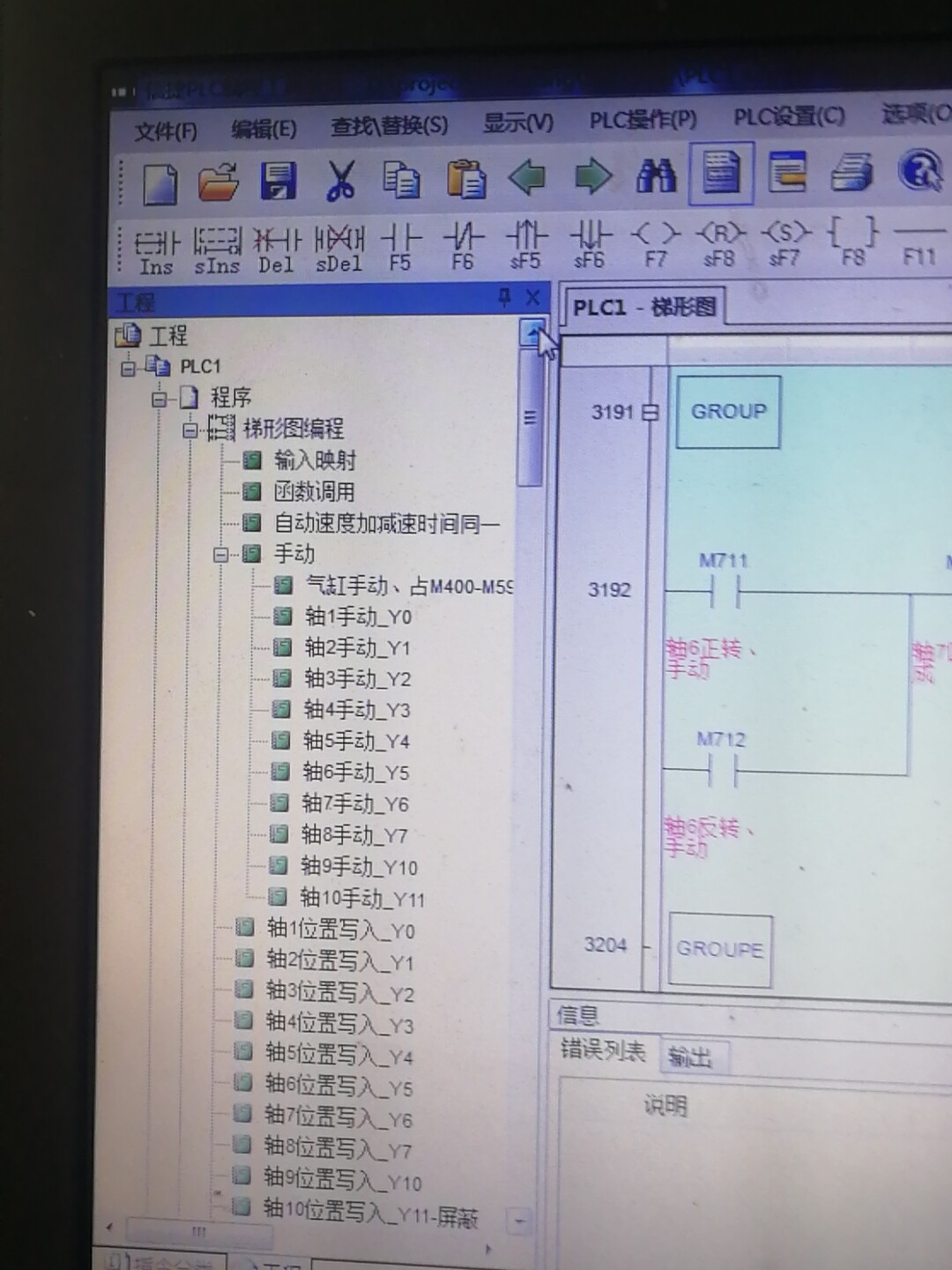
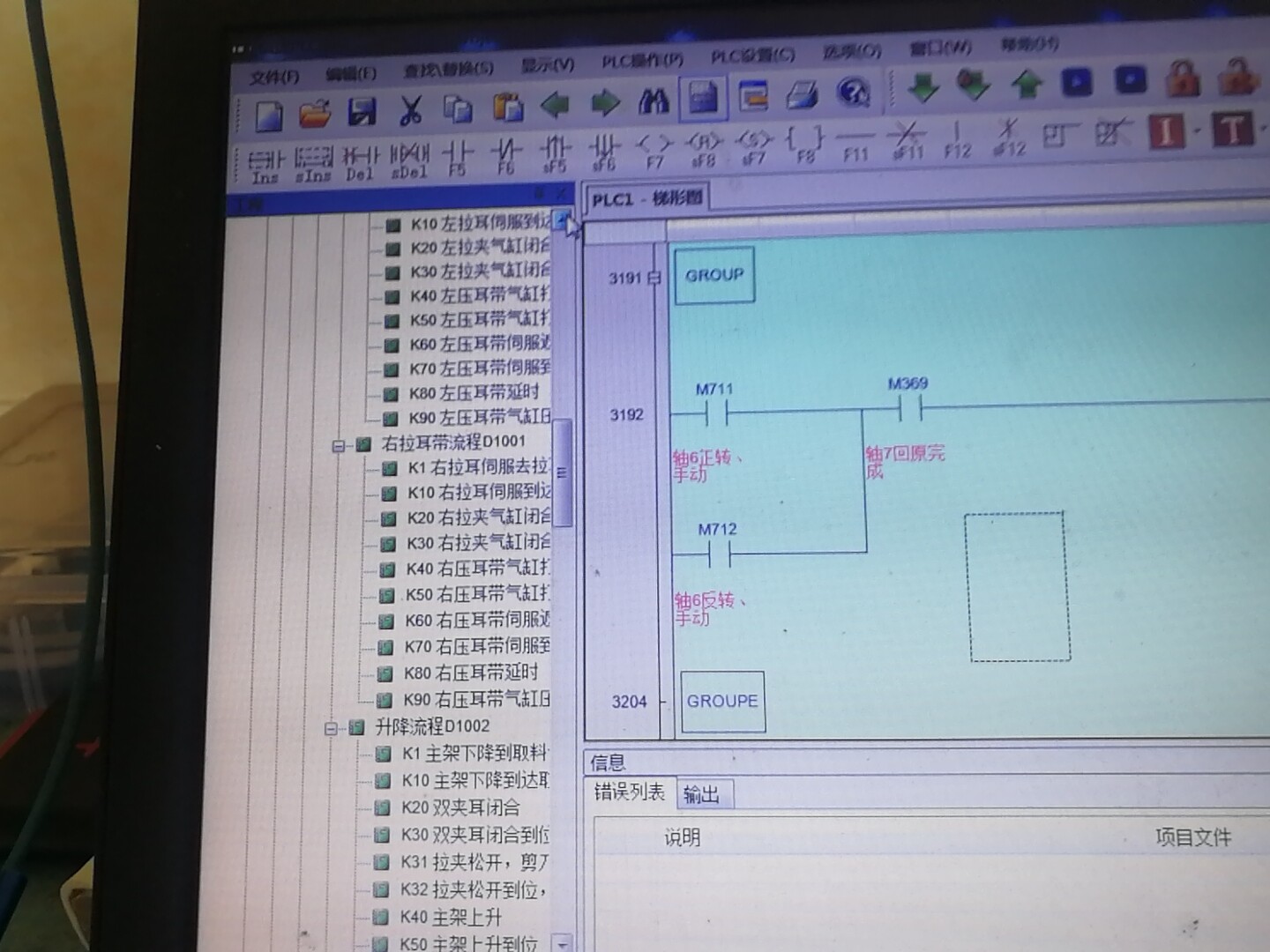
2.1 模块化设计
为了实现程序架构的通用性和拓展性,我们采用了高度模块化设计。将伺服口罩机的不同功能模块拆解为独立的子程序,通过调用这些子程序来完成整体的功能实现。这样一来,可以根据实际需求灵活组合不同的子程序,实现针对不同轴数的伺服口罩机的程序开发。
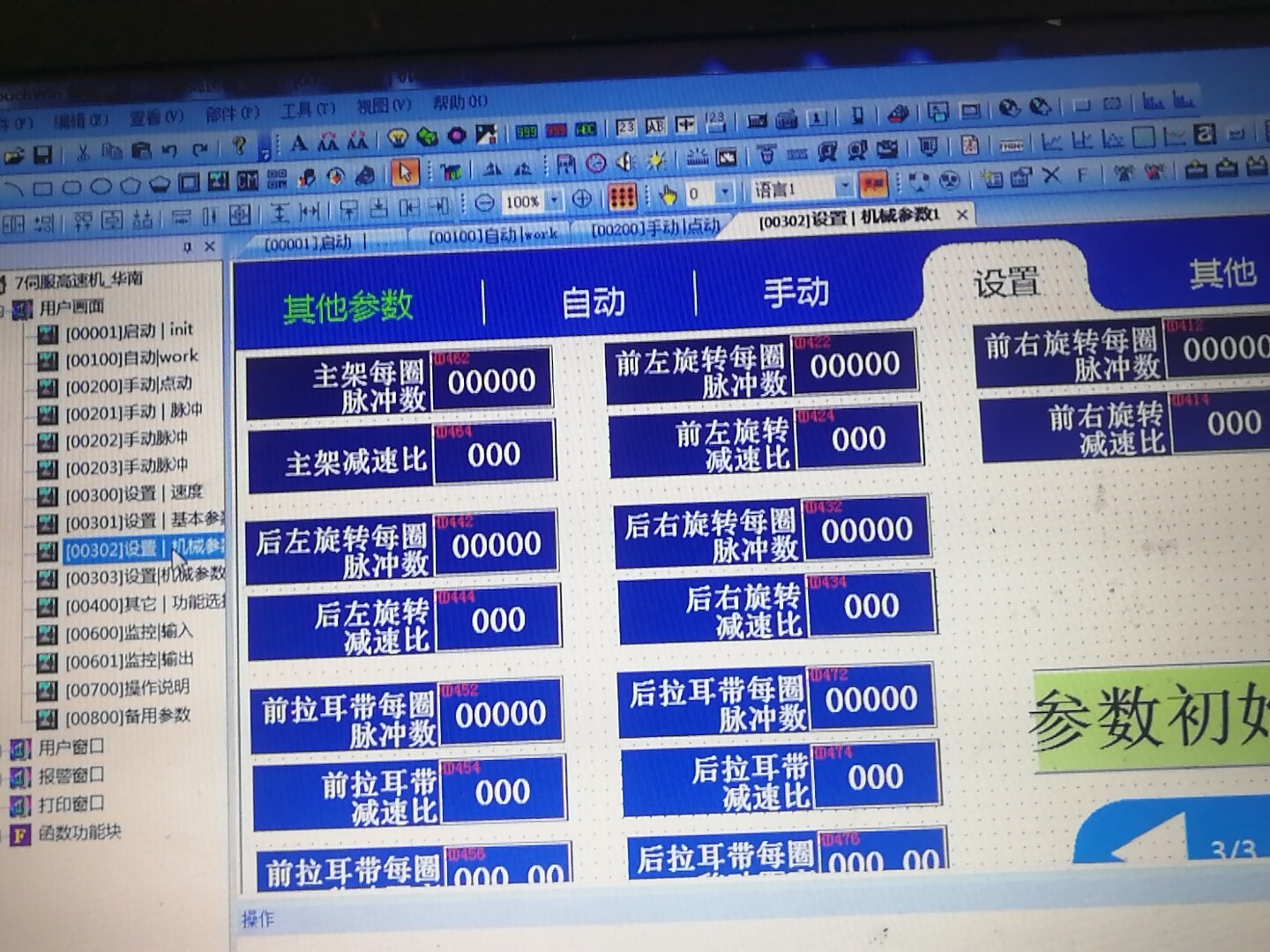
2.2 PLC选型
在市场上众多的PLC产品中,我们选择了性价比最高的信捷XD560T10模块作为控制器。该模块具备60个点10轴高速脉冲输出功能,能够满足伺服口罩机多轴运动控制的需求。同时,该模块支持S形和正弦曲线加减速,可实现运动控制的柔性调节,提高机器的稳定性和运行效率。
- 应用实例
3.1 7轴伺服口罩机
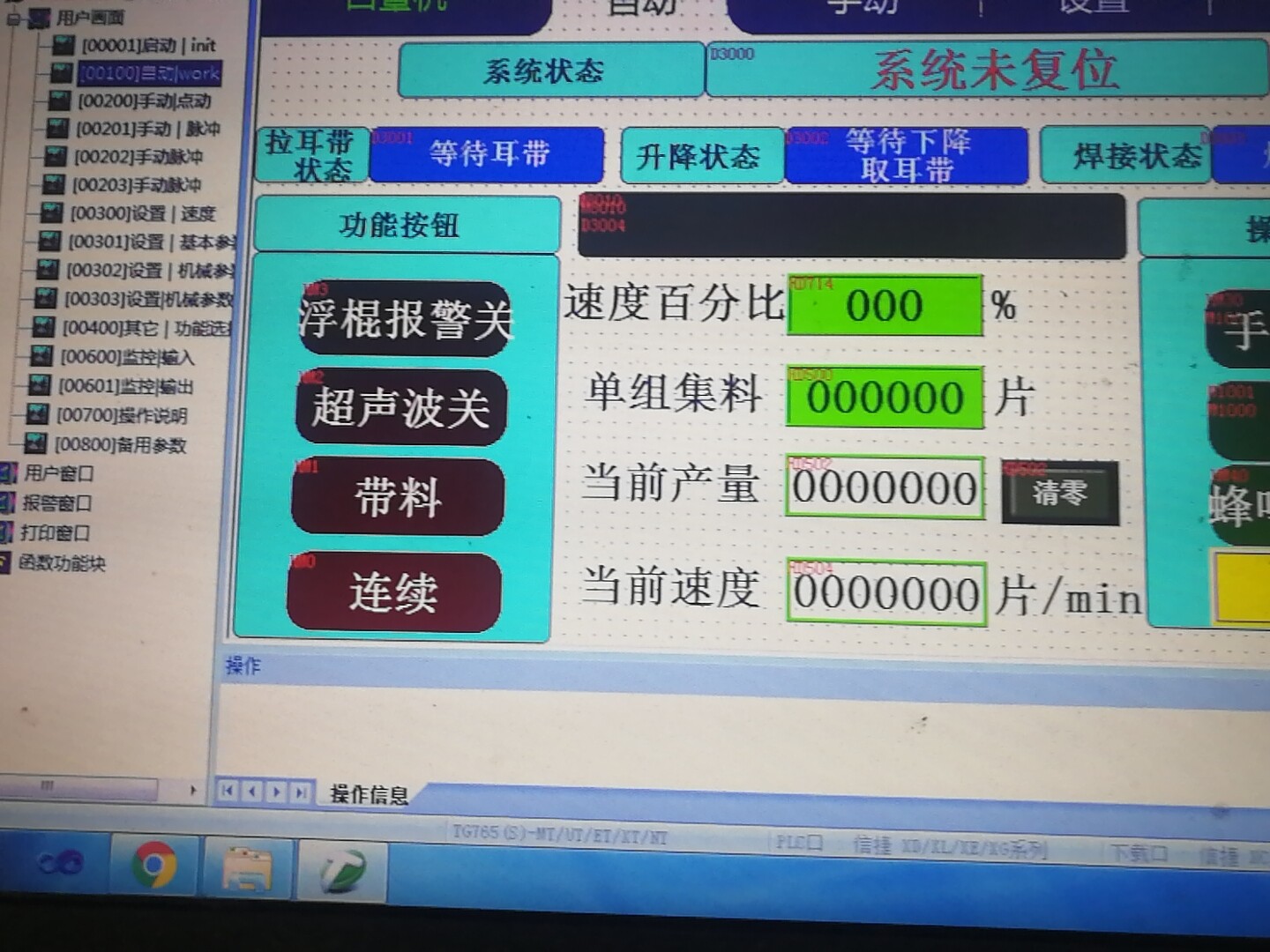
我们将程序架构应用于一台7轴伺服口罩机实例。通过配置PLC模块的输入输出和轴数,我们成功实现了七个轴的分布式运动控制,实现了对多个部件的精确控制。每个轴都通过调用相应的子程序来完成对应的运动功能,保证了整机的稳定运行和高效生产。
3.2 10轴伺服口罩机
在10轴伺服口罩机实例中,我们进一步拓展了程序架构的功能。通过调用更多的子程序,实现了对十个轴的独立控制。同时,由于PLC模块的高速脉冲输出功能,我们实现了运动控制的快速响应,提升了生产效率。
- 结论
本文介绍了市面上最先进的7、8、9、10轴伺服口罩机通用程序架构。该程序架构采用了高度模块化设计,具备良好的可拓展性,已成功应用于大量口罩机机器上。其中,PLC选型采用了性价比最高的信捷XD560T10模块,能够满足多轴运动控制的需求,并通过S形和正弦曲线加减速技术实现了更柔性的运动控制。该程序架构的应用实例验证了其稳定性和高效性,为口罩机行业的发展提供了一种可靠的解决方案。
关键词:伺服口罩机,程序架构,模块化设计,PLC选型,信捷XD560T10模块,多轴运动控制,S形加减速,正弦曲线加减速。
相关的代码,程序地址如下:http://imgcs.cn/634192355109.html
















 532
532











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









