







我在做课设、大作业的时候经常要做机电联合仿真,这个过程中遇到了许多不同的困难,现在将这些问题记录下来,以备不时之需,也能和同志们分享学习。
后来的补充:强烈建议没有强制要求的同志不要用ADAMS仿真了,在这篇文章里你会看到我从各个角度吐槽这个软件难用,但是当时的课程设计要求我们使用ADAMS进行仿真。现在我本人已经转用Recurdyn进行机电联合仿真了,Recurdyn的仿真性能更强,人机交互也更加优秀,还支持柔性零部件的有限元分析,有机电联合仿真需求的同志都可以尝试。我还犹豫过要不要把这个文章写完,但是转念一想还是得有始有终,因此把怎么使用ADAMS进行机电联合仿真补完。
将Solidworks模型导入ADAMS
第一种方法是Solidworks模型直接另存为Parasolid(.x_t)文件,然后在ADAMS中File -> Import...。但是这样导入的装配体没有装配关系,需要在ADAMS中重新添加,很繁琐。
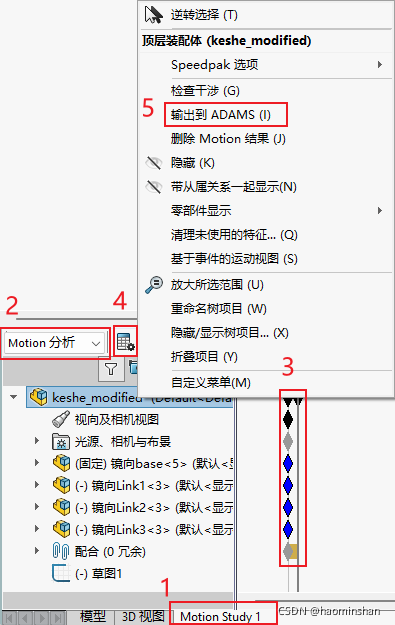
第二种方法是在Solidworks插件中选择Solidworks Motion,然后在下面Motion Study中选择Motion分析,稍微拖动一下时间轴,点击计算,随后右键装配体选择输出到ADAMS,这样会生成一个.adm文件,在ADAMS中直接Open即可。这样导入的装配体装配关系已经设置完成了,直接进行下一步仿真即可。
在ADAMS中建立机械系统和接口
在用了一段时间ADAMS之后,我只能说ADAMS非常难用,它的许多设计是违反用户的使用习惯的,界面的冗余太多,而真正有用的功能却往往藏在看不见的地方,更不必说匮乏又模糊的错误提示了。所以在使用ADAMS中,要特别小心,不然可能就得从导入模型开始重做。(这也是为什么我要从Solidworks中导入带装配关系的模型,仿真也要用Simulink联合仿真,就是为了避开ADAMS这个折磨人的东西)
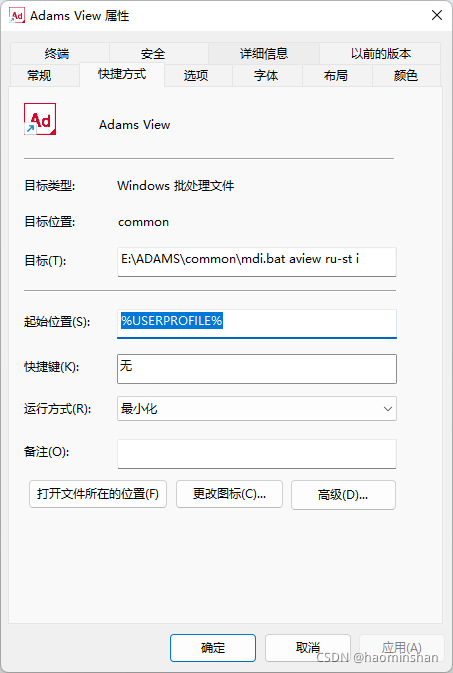
第一步自然是打开ADAMS。在ADAMS的使用过程中务必注意ADAMS的工作路径,一般来说ADAMS的默认工作路径都是C盘的Users文件夹,而Files->Open Database不会自动切换工作路径。如果工作路径不对,输出的所有控制框图和算例结果都不会出现在ADAMS模型文件夹内,所以设置好工作路径非常非常重要。除了开始界面能选择工作路径以外,Files->Select Directory也能变更ADAMS的工作路径。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2093
2093

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









