







摘要:
一、 研究背景:
窃听技术经过多年的发展,衍生出多种窃听的方式,其中激光窃听技术由于其能够远距离非接触式窃听,不易被发现等优点,逐渐有了较为广阔的应用价值以及研究空间。近几年激光窃听器的方案不断的成熟,并开始走向应用。在实验中可以发现,激光窃听器噪声的来源主要是光源产生的噪声,由于半导体激光器制作工艺本身会产生不可避免的噪声,影响到窃听信号的信噪比,本文利用四象限探测器巧妙的抑制激光器自身产生的噪声,并有效放大窃听信号。为了能够更加有效的窃听信息,对音源定位也是非常关键的。
二、 系统原理以及构成:
激光窃听器原理是将激光打到远距离的窗户、玻璃、水杯等易受声波发生震动且发射率较高的物体。声波的震动会引发物体的表面震动,进而在物体表面产生微小的位移,这段微小位移作用在反射光上面,反射光点也发生同等程度的位移,在光电探测器件上就会产生光强的变化。通过电路的转换、放大,还原原始的声音信号。系统整体框图如图所示:
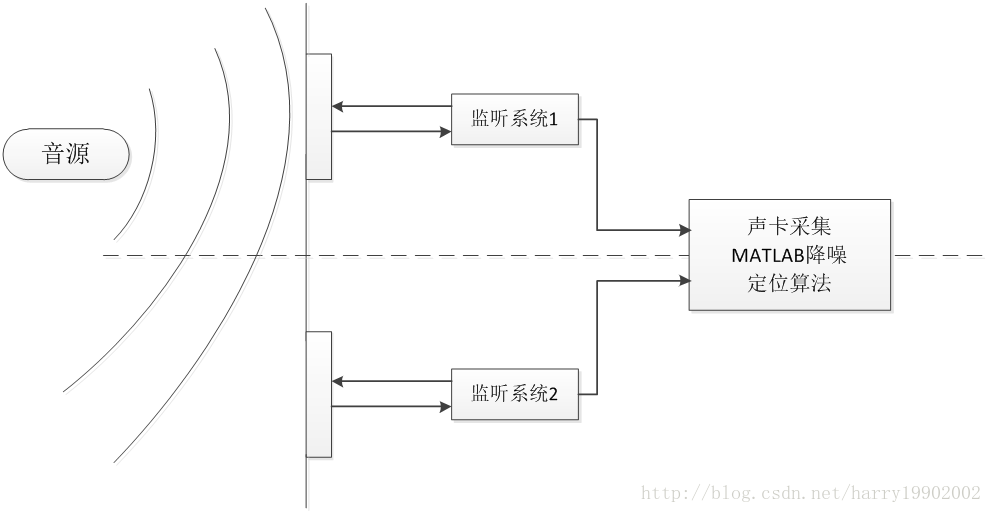
图1 系统整体框图
三、 四象限探测器降噪电路
若该系统单单使用传统的PIN光电探测器,由于激光器激射本身的量子效应的不确定性,会使得激光器产生光强度以及光相位的噪声,统称为光噪声,并且即使激光器在恒定的驱动电流下工作, pn 结两端的电压也会出现涨落,这种涨落表现为电噪声。这两种噪声的功率频谱在整个频域内均匀分布,为白噪声,这样对消除这类噪声也带来了一定的难度。
为了消除这类噪声,较为常见的方法是使用差分的原理,即带有信息的信号和未带有信息的信号做差,则可以得到没有噪声信息信号。这种具体到每个传感器系统实现方式千差万别。由于在激光窃听系统中激光发射出的光束经过空气的衰减,以及玻璃的透射等,接受光束与发射光束在光强以及相位上都发生很大改变,若在激光探测器发射端与接收端进行差分电路设计,很难达到理想效果。但四象限探测器就可以在接收端对两个信号进行差分运算。
四象限探测器由4个完全相同的PIN光电二极管按照坐标直角方式排列形成的光电探测器件,通过对四个象限得到的信号合理运算,可以实现很多功能,如探测光源位置,激光准直等。在本系统中,由于从四象限探测器提取出的两两信号夹杂的声音信号相位相反,噪声相位相同,在做差的过程中,不仅有效抑制住了激光器产生的噪声信号,同时也使声音信号得到了增强。
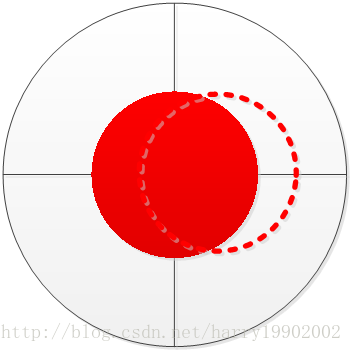
图2 四象限探测器应用原理
如图2,当激光反射光电由于声波使玻璃震动反射回的光点向右移动时,第一象限以及第四象限的信号强度分别增加,而第二象限以及第三项现的信号强度等幅的减小,将一二象限和三四象限信号做差,并将做完差的信号求和,便可以得到信噪比非常高的信号了。
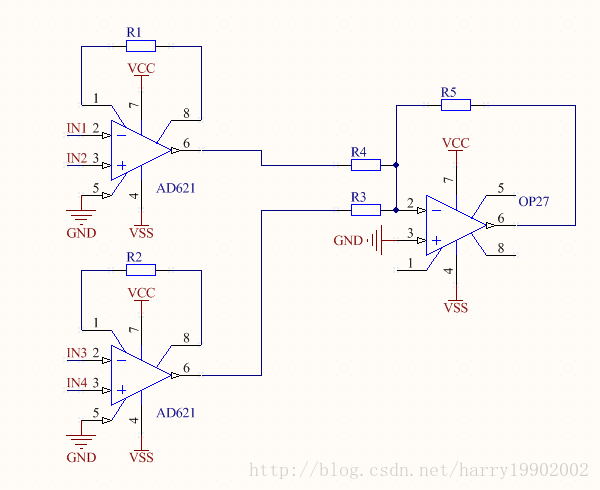
对于差分运算,系统在系统中选用了AD621仪表放大器,AD621是一款增益可调、低噪声的放大器,其工作频率在1-10KHz,符合语音频率的要求,由于AD621不能处理频率过高的信号,所以光电转换后的信号需要经过一个截至频率在10KHz的低通滤波器后才能够使用AD621进行差分运算,电路如图所示:
四、 核心算法:
算法部分主要由方鹏负责。具体由两部分:
(1) FIR滤波算法以及自适应滤波算法,使得其他因素产生的噪声被滤掉。
(2) 采用负相关算法设计的定位算法。
五、实验结果:

















 1453
1453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









