






一、名词解释(5*4')
1.SLAM
定位+建图。一方面要明白自身的状态(即位置),另一方面也要了解外在的环境(即地图)。
2.刚体的定义
刚体是在任何情况下,其内部任意两点之间的距离始终保持不变的物体。换言之,刚体的形状和大小在运动过程中不会发生任何改变。
3.刚体的运动
两个坐标系之间的运动由一个旋转加上一个平移组成。
4.特殊正交群
旋转矩阵的集合为特殊正交群。旋转矩阵满足R是一个正交矩阵且R的行列式为+1。特殊正交群定义如下:

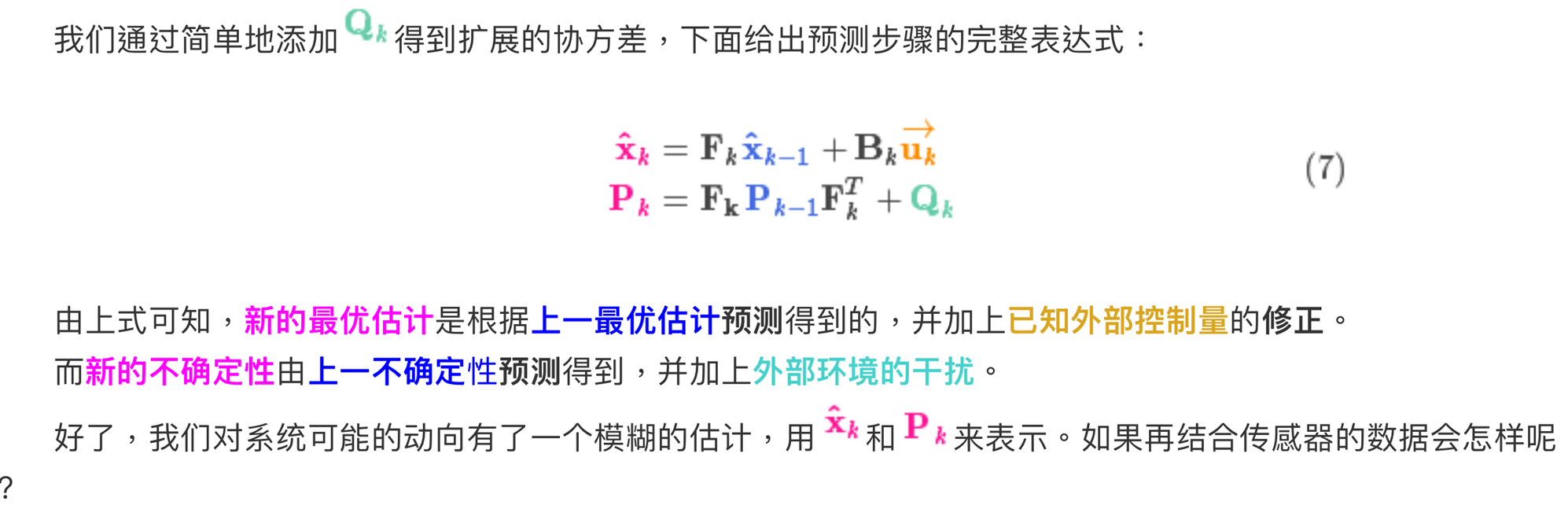
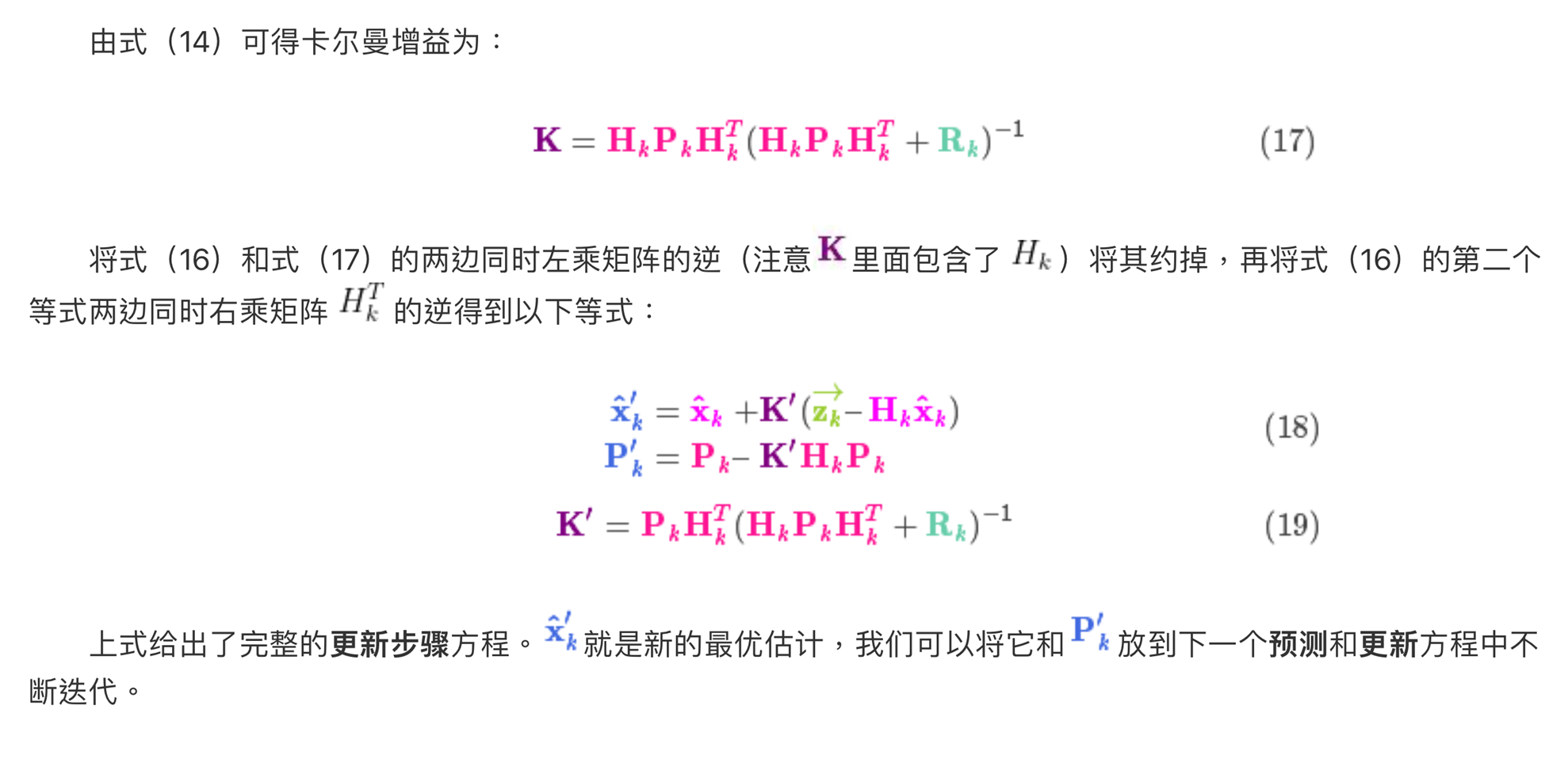
5.公式含义解释(卡尔曼滤波)
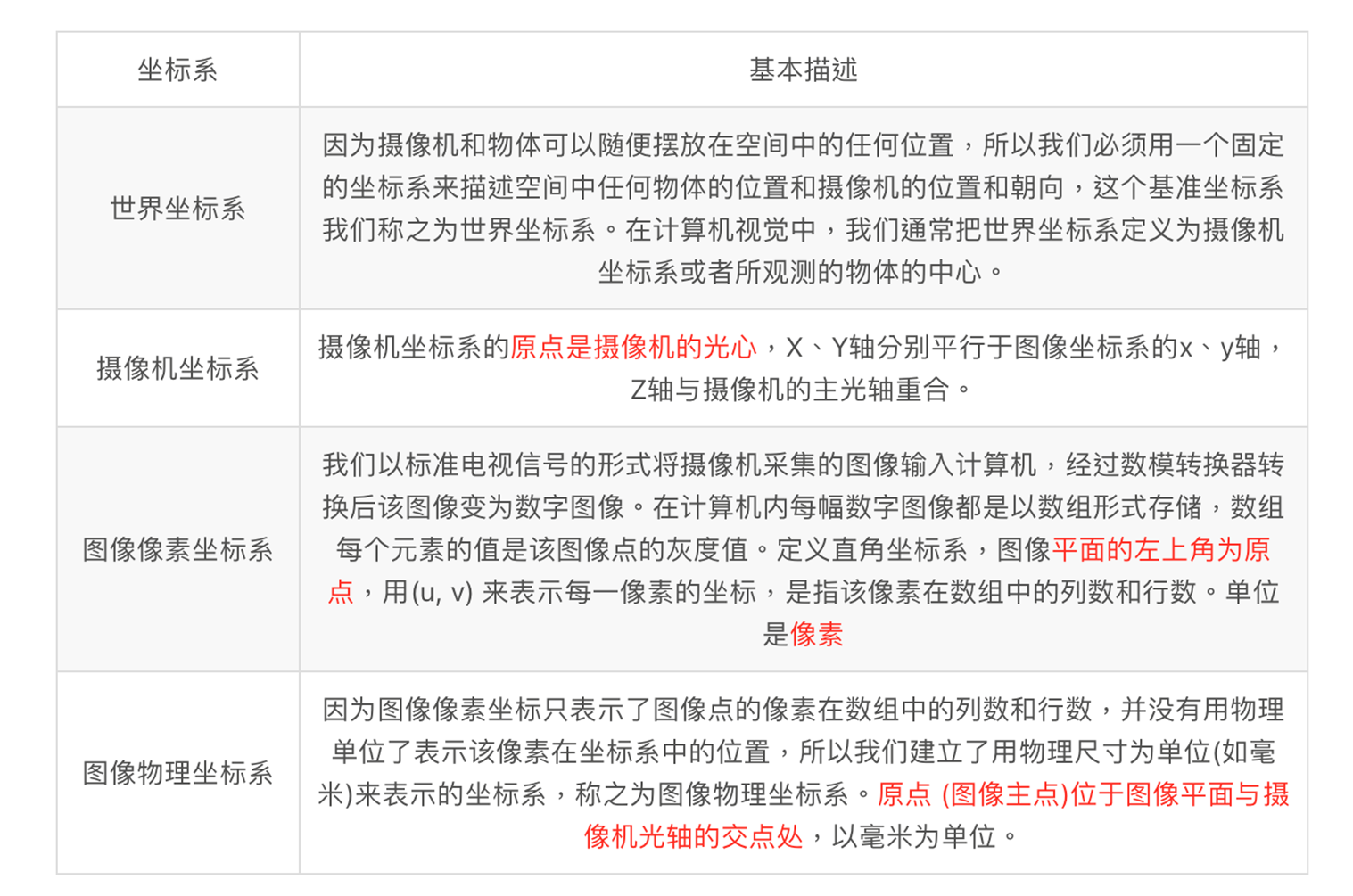
6.相机坐标系概念(世界/图像像素/图像物理概念)
相机坐标系的原点通常位于相机的光心(Optical Center),即相机镜头的中心点。Z轴与摄像机主光轴重合。
7.卡尔曼增益
卡尔曼增益(Kalman Gain)是卡尔曼滤波算法中的一个关键参数,用于在状态估计过程中平衡预测误差和测量误差。
卡尔曼增益的大小反映了测量值相对于预测值的可信度。如果测量噪声较小(即 Rk 较小),卡尔曼增益较大,意味着测量值在状态更新中占较大权重。相反,如果预测误差较小(即 Pk∣k−1 较小),卡尔曼增益较小,意味着预测值在状态更新中占较大权重。通过这种方式,卡尔曼滤波能够在预测和测量之间找到一个最优的平衡点,从而实现对系统状态的最优估计。
......
二、问答(80')
1.SLAM的基本框架
智能无人系统(视觉SLAM基本知识-初始SLAM)_视觉slam基础-CSDN博客
2.四元素和欧拉角
智能无人系统(SLAM中四元素和欧拉角的区别)-CSDN博客
3.坐标系转换(几个坐标系区别)
......
4.卡尔曼滤波
【卡尔曼滤波】图文结合带你详细推导卡尔曼滤波(超详解)-CSDN博客
5.其他
后续更新,敬请期待

















 7004
7004

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









