






目标检测对比分析
1.背景差分法
原理介绍
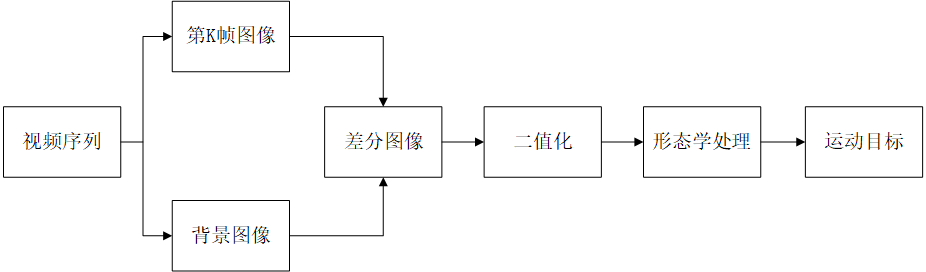
背景差法是一种应用最为普遍的检测方法,采用该方法的主要步骤是:构建背景模型并提取背景图像,将当前图像和背景图像作差,差值较大的像素点被看作前景目标,差值较小的像素点看作背景。背景差分法检测运动目标框图如下:
 复杂场景下视频序列中的背景会随着时间的继续不断的受到光照等外界因素的影响而改变,因此,为了得到的背景图能够反映当前帧的背景,就需要建立合适的背景模型来及时的反映背景的改变。常用背景模型如下表:
复杂场景下视频序列中的背景会随着时间的继续不断的受到光照等外界因素的影响而改变,因此,为了得到的背景图能够反映当前帧的背景,就需要建立合适的背景模型来及时的反映背景的改变。常用背景模型如下表:

对背景差分结果影响最大的因素之一是背景模型的选取,背景模型的选取的好坏直接关系到运动目标检测的结果是否精确。通过对传统的单高斯背景模型和GMM的研究,单一分布的高斯模型能较好地适用于室内场景;但是在环境变化较复杂的室外,单高斯分布的模型会出现较大偏差。针对道路车辆行驶复杂场景下运用GMM背景差分法进行运动目标检测。检测结构如图所示:
实验结果

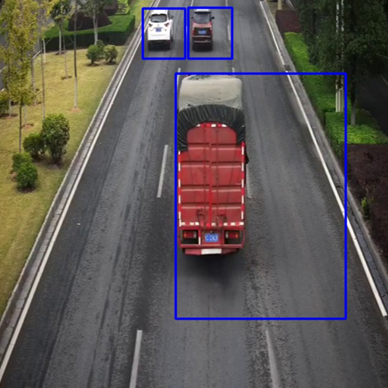
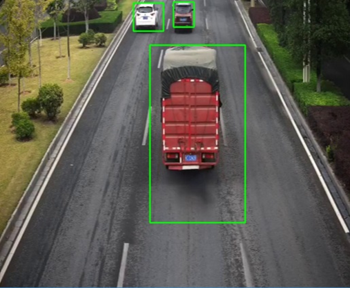
**结果分析:**将GMM的背景差分的方法引用到本文车辆数据集中,实验发现受道路旁的树木干扰等因素,虽然能检测到目标车辆,但实际检测到的前景目标偏大,不利于接下来的对疑似黑烟区的划定。
2.光流法
原理介绍
光流法是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。光流法的基本假设条件:
(1)亮度恒定,就是同一点随着时间的变化,其亮度不会发生改变。
(2)像素偏移小,这个也必须满足,就是时间的变化不会引起位置的剧烈变化,这样能用前后帧之间位置变化引起的灰度变化去近似灰度对位置的偏导数。
在不知道任何视频内容的先验信息的情况下估计出一个视频序列或者两帧之间的运动,便需要将图像中的每个像素与速度关联,也就是说要与该像素点在两帧之间的位移关联,稠密光流就是应用这种方式得到的。这种方法要将图像中的每个像素点计算一遍,计算量比较巨大。在许多情况下并不适用,为了减小计算量,基于具有共同特征的点的集合,利用角点信息进行光流计算,这便是Lucas-Kanade稀疏光流法。
由光流法的基本假设,LK光流法在原先的光流法两个基本假设的基础上,增加了一个“空间一致”的假设,即当前帧相邻的像素在下一帧应该也是相邻的。
实验结果



**结果分析:**光流法是通过估计视频帧中物体运动过程中产生的运动场,并分析其变化,由于背景物体的运动场和运动物体的运动场有所区别,从而把运动目标从背景中分离出来。该方法的检测精度相对较高,但是光流场的计算却十分复杂、实时性差等特点难以适用在本文对运动目标车辆的检测。
帧间差分法
原理介绍
帧间差分法又叫两帧差分法,是利用视频相邻两帧之差的像素点变化,来获取运动目标的轮廓。车辆在移动中,相邻两帧之间的像素会出现明显的差别,通过将两帧做差分运算,得到两帧图像的差的绝对值,若差值大于设定的阈值,即为运动车辆目标,否则即为背景。两帧差分法原理框图如下:
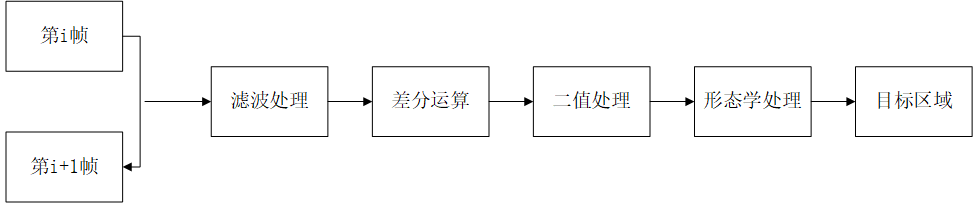
两帧差法计算步骤如下:
(1)读取视频中两帧相邻图像f_(i+1) (x,y)、f_i (x,y);
(2)将两帧图像中对应位置的像素做减法,取绝对值得到差分图像D_i (x,y);
(3)设定阈值T,差分后像素值变化与设定阈值比较得到B_i (x,y)即为目标图像。
实验结果

**结果分析:**通过实验结果可以知道两帧差分法优点为:算法简单和检测速度快等特性能够满足本论文要求的实时性强的特性。缺点为:依赖于选择的帧间时间间隔,不能提取出对象的完整区域。
总结
综上实验,帧差检测快且描框范围影响较小,适合本数据集车辆检测。
















 9158
9158











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











