







目录
前言
本智能宠物喂食器的硬件端主要采用了红外检测和光敏电阻作为主要的传感器。红外对射检测距离为3-5厘米,当有宠物进食时,舵机自动打开投喂器,方便宠物进食。同时,该设备还使用光敏电阻进行环境光照强度的检测,如果监测到环境中有物体,并且光照强度过低,则启动小夜灯,方便夜间操作。 此外,硬件端还可以获取环境温湿度,并且将环境数据以及状态通过0.96OELD显示出来,方便用户随时了解设备状态。设备还采用了ESP32-CAN进行图像传输,需要连接ESP32建立的WIFI即可获取图像。硬件端还使用了云台进行图像获取区域的改变,使设备能够灵活适应不同的环境条件。 而APP端则主要负责图像获取和传输。用户可以通过APP获取设备采集到的图像,并且通过控制云台控制ESP32-CAN的图像获取方向,实现对设备的控制和监控。通过该智能宠物喂食器,用户可以进行宠物喂食和环境监测,提高了宠物和主人的生活质量。
欢迎关注微信公众号星之援工作室,公众号不定时开源设计项目
支持单片机,Android系统设计成品定制,项目代做
请联系微信:13648103287
一 连线图
1. 原理图
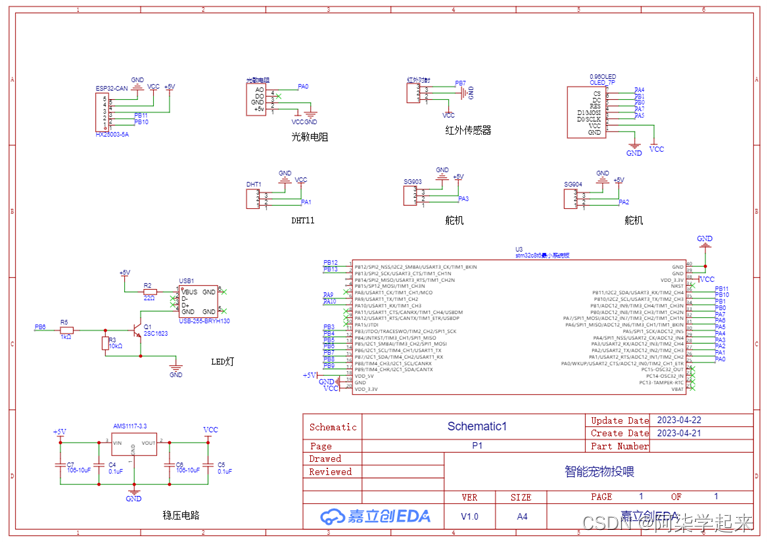
1. 当LED灯和机器一起闪烁时,说明已经成功连接上了云平台。同时,OLED显示屏会显示联网状态。如果在MUC(Micro-controller Unit,微控制器单元)上的LED灯也在闪烁,则表示设备正常运行。如果LED灯停止闪烁,可以按复位键进行手动复位操作。
2. 硬件每隔10秒钟会向云平台传输一次数据。
2. PCB效果

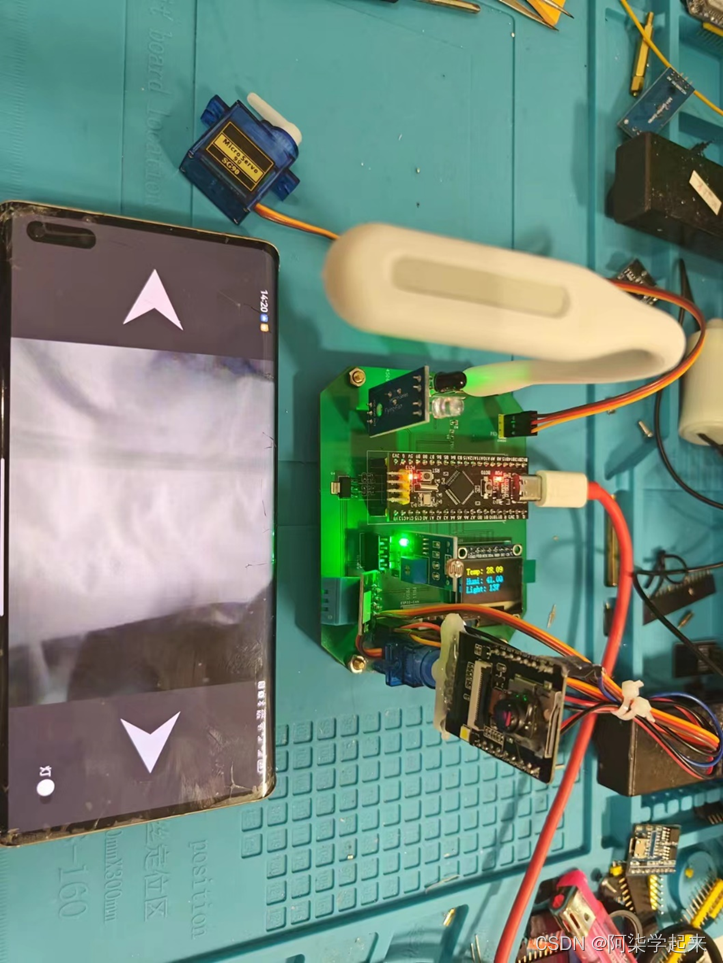
3. 实物效果
4. 功能概括
(1)硬件端
1 用红外对射检测宠物是否进食,检测距离为3-5厘米,如果有宠物进食,则打开舵机投喂器。
2. 使用光敏电阻检测环境光照强度,如果红外监测到有物体并且光照强度过低,则开启小夜灯。
3. 获取环境温湿度数据。
4. 使用0.96OELD显示环境数据和设备状态。
5. 使用ESP32-CAN进行图像传输,连接ESP32建立的WIFI后,可以获取云台控制局域网传输的图像和控制设备。
6. 使用云台改变图像获取区域。
(2)APP端
1. 首先需要在APP中设置图像获取的方式,选择相应的摄像头或视频源。
2. 通过APP发送控制命令来控制云台的运动方向,以调整图像获取的角度。
3. ESP32-CAN接收到控制命令后,根据命令进行云台运动控制,并将获取到的图像传输到APP中。
4. APP接收到图像数据后,将其解码并显示在界面中,用户即可实时查看云台所拍摄到的图像。 5. 可以通过持续发送控制命令来实时调整云台的角度,以获取想要的图像信息。
演示视频
链接:https://pan.baidu.com/s/1p7ZPrXNiRjlI_92w8WNbvA?pwd=xzy0
提取码:xzy0
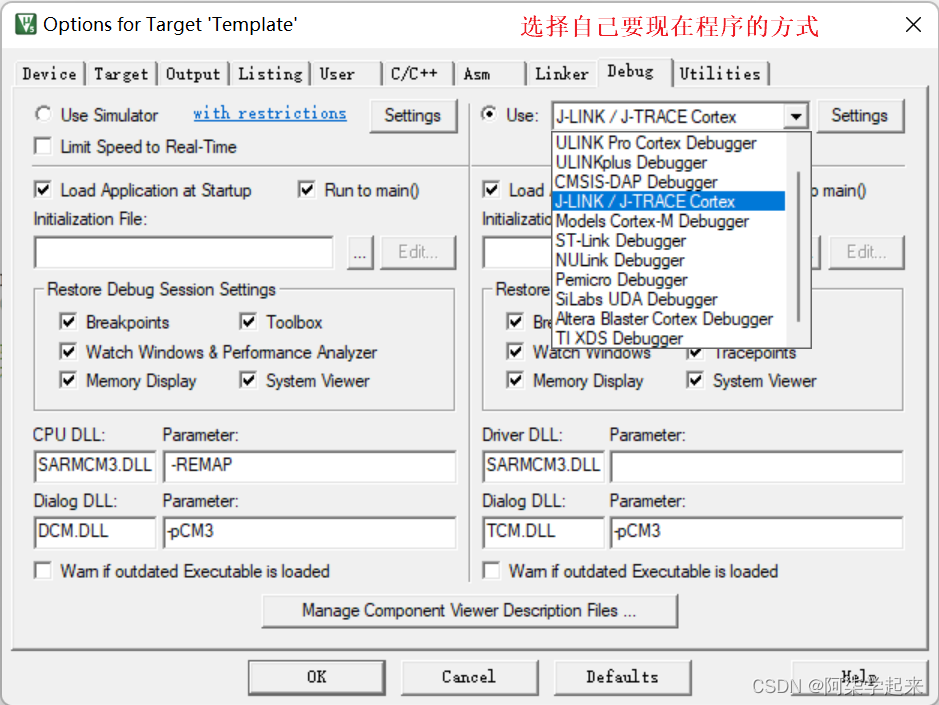
二 底层代码使用方式
1. 使用说明
(1). 使用的时候设备会连接WIFI
热点名字:WIFI-PET密码:12345678。
(2). 当设备处于正常状态的时候,开发板上面的LED会处于闪烁的状态
(多看视频,视频中有完整功能演示)
(多看视频,视频中有完整功能演示)
(多看视频,视频中有完整功能演示)
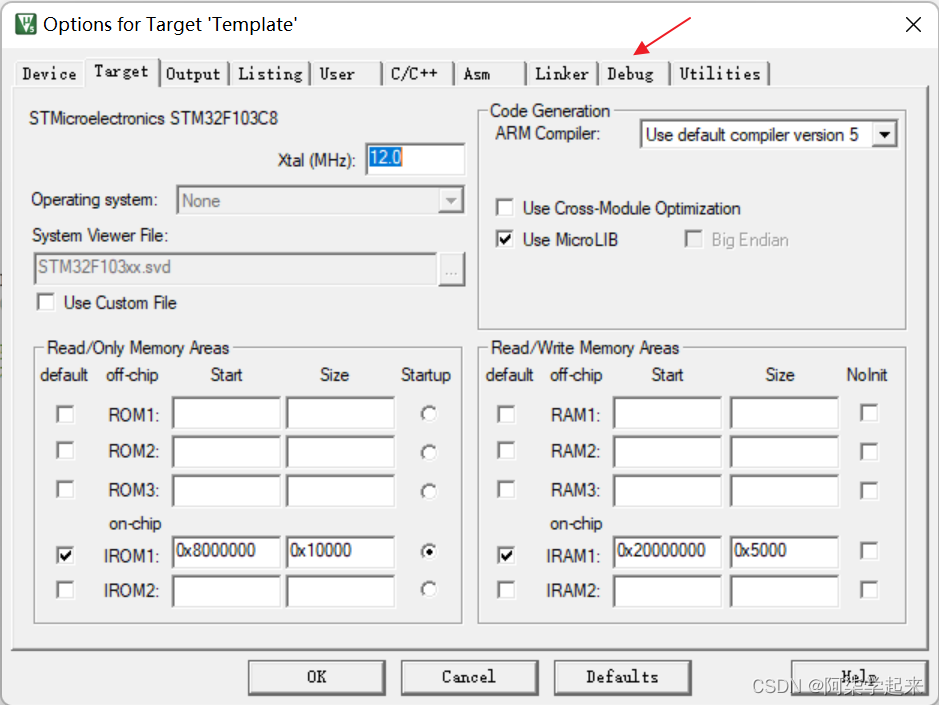
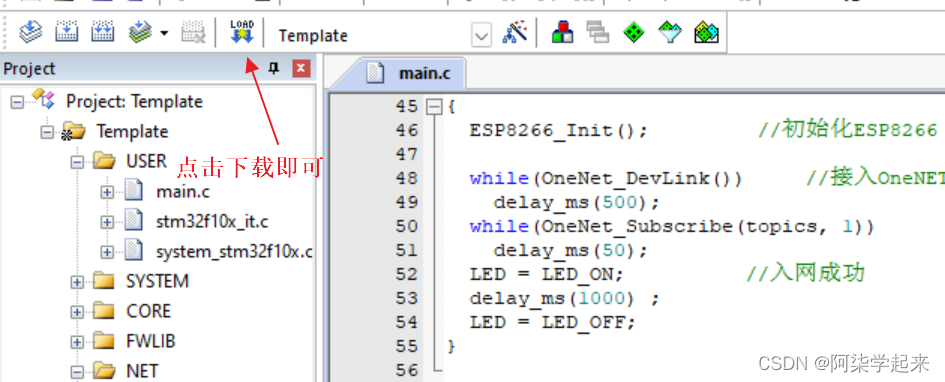
2. 下载程序
- 先根据原理图进行连线,连接好以后在做后面的操作
- 打开手机热点 热点名字:NET密码:12345678
- 打开程序(硬件由工作室出的可以忽略下载程序这部分


三 APP使用方式
1.下载APP
(1)操作方式:
使用Android手机安装APK进行操控

安装Android studio导入项目使用模拟器
Android studio下载链接
(2)使用说明
该设备可以通过连接WiFi自动连接到网络,使用左右按键可以进行图像方位的调整,以便获取更好的拍摄效果。同时,还可以通过app来进行补光操作,提高监控效果。
(多看视频,视频中有完整功能演示)
(多看视频,视频中有完整功能演示)
(多看视频,视频中有完整功能演示)
2.APP界面

🫡若需要,请咨询博主🫡
⚠️⚠️END⚠️⚠️


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











