







 本文详细介绍了无人驾驶系统,包括传感、感知、决策、Client系统和云平台。重点讨论了GPS/IMU融合定位、激光雷达与摄像头在物体识别追踪中的应用,以及决策过程中的行为预测、路径规划和避障机制。文章还提到了ROS操作系统在无人驾驶中的作用,以及硬件平台和云平台在无人驾驶产业中的重要性和发展趋势。
本文详细介绍了无人驾驶系统,包括传感、感知、决策、Client系统和云平台。重点讨论了GPS/IMU融合定位、激光雷达与摄像头在物体识别追踪中的应用,以及决策过程中的行为预测、路径规划和避障机制。文章还提到了ROS操作系统在无人驾驶中的作用,以及硬件平台和云平台在无人驾驶产业中的重要性和发展趋势。
作者: 刘少山,唐洁,吴唯玥
责编:何永灿,欢迎人工智能领域技术投稿、约稿、给文章纠错,请发送邮件至heyc@csdn.net
本文为《程序员》原创文章,未经允许不得转载,更多精彩文章请订阅《程序员》
本文是无人驾驶技术系列的第12篇,也是最后一篇(文末汇总了无人驾驶系列文章)。本文梳理总结了前面11篇涉及到的技术点,尝试呈现一个宏观的无人驾驶系统架构。另外,简单分析了无人驾驶的产业链现状以及根据笔者自己的经验提出了一些给开发者、创业者,以及投资者的建议。
无人驾驶技术总结
无人驾驶是一个复杂的系统,如图1所示,系统主要由三部分组成:算法端、Client端和云端。其中算法端包括面向传感、感知和决策等关键步骤的算法;Client端包括机器人操作系统以及硬件平台;云端则包括数据存储、模拟、高精度地图绘制以及深度学习模型训练。
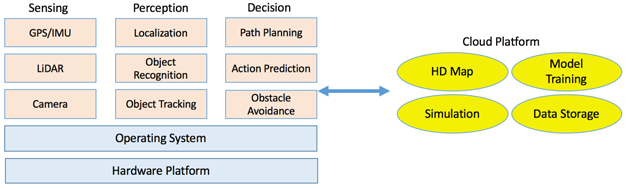
算法子系统从传感器原始数据中提取有意义的信息以了解周遭环境情况,并根据环境变化做出决策。Client子系统融合多种算法以满足实时性与可靠性的要求。举例来说,传感器以60HZ的速度产生原始数据,Client子系统需要保证最长的流水线处理周期也能在16ms内完成。云平台为无人车提供离线计算以及存储功能。通过云平台,我们能够测试新的算法、更新高精度地图并训练更加有效的识别、追踪、决策模型。
无人驾驶算法
算法系统由几部分组成:第一,传感并从传感器原始数据中提取有意义信息;第二,感知,以定位无人车所在位置以及感知现在所处的环境;第三,决策,以可靠安全抵达目的地。
传感
通常来说,一辆无人驾驶汽车装备有许多不同类型的主传感器。每一种类型的传感器都各有优劣,因此,来自不同传感器的传感数据应该有效地进行融合。现在无人驾驶中普遍使用的传感器包括以下几种。
- GPS/IMU:通过高达200Hz频率的全球定位和惯性更新数据以帮助无人车完成自我定位。GPS是一个相对准确的定位用传感器,但是它的更新频率过低,仅仅有10HZ,不足以提供足够实时的位置更新。IMU的准确度随着时间降低,在长时间内并不能保证位置更新的准确性,但是,它有着GPS所欠缺的实时性,IMU的更新频率可以达到200HZ或者更高。通过整合GPS与IMU,我们可以为车辆定位提供既准确又足够实时的位置更新。
- LiDAR:激光雷达可被用来绘制地图、定位以及避障。雷达的准确率非常高,因此在无人车设计中雷达通常被作为主传感器使用。激光雷达是以激光为光源,通过探测激光与被探测无相互作用的光波信号来完成遥感测量。激光雷达可以用来产生高精度地图,并针对高精地图完成移动车辆的定位;以及满足避障的要求。以Velodyne 64-束激光雷达为例,它可完成10HZ旋转并每秒可达到130万次读数。
- 摄像头:被广泛使用在物体识别以及物体追踪等场景中,像是车道线检测、交通灯侦测、人行道检测中都以摄像头为主要解决方案。为了加强安全性,现有的无人车实现通常在车身周围使用至少八个摄像头,分别从前、后、左、右四个维度完成物体发现、识别、追踪等任务。这些摄像头通常以60HZ的频率工作,当多个摄像头同时工作时,将产生高达1.8GB每秒的巨数据。
- 雷达和声呐:雷达通过把电磁波能量射向空间某一方向,处在此方向上的物体反射碰到的电磁波;雷达再接收此反射波,提取有关该物体的某些信息(目标物体至雷达的距离,距离变化率或径向速度、方位、高度等)。雷达和声呐系统是避障的最后一道保障。雷达和声呐产生的数据用来表示在车的前进方向上最近障碍物的距离。一旦系统检测到前方不远有障碍物出现,则有极大的相撞危险,无人车会启动紧急刹车以完成避障。因此,雷达和声呐系统产生的数据不需要过多的处理,通常可直接被控制处理器采用,并不需要主计算流水线的介入,因为可实现转向,刹车、或预张紧安全带等紧急功能。
感知
在获得传感信息之后,数据将被推送至感知子系统以充分了解无人车所处的周遭环境。在这里感知子系统主要做的是三件事:定位、物体识别以及物体追踪。
定位
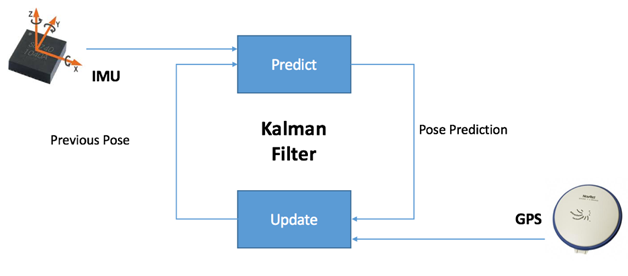
GPS以较低的更新频率提供相对准确的位置信息;IMU则以较高的更新频率提供准确性偏低的位置信息。我们可使用卡尔曼滤波来整合两类数据各自的优势,合并提供准确且实时的位置信息更新。如图2所示,IMU每5ms更新一次,但是期间误差不断累积精度不断降低。所幸的是,每100ms可以得到一次GPS数据更新,以帮助我们校正IMU积累的误差。因此,我们最终可以获得实时并准确的位置信息。然而,我们不能仅仅依靠这样的数据组合以完成定位工作。原因有三:其一,这样的定位精度仅在一米之内;其二,GPS信号有着天然的多路径问题将引入噪声干扰;其三,GPS必须在非封闭的环境下工作,因此在诸如隧道等场景中GPS都不适用。
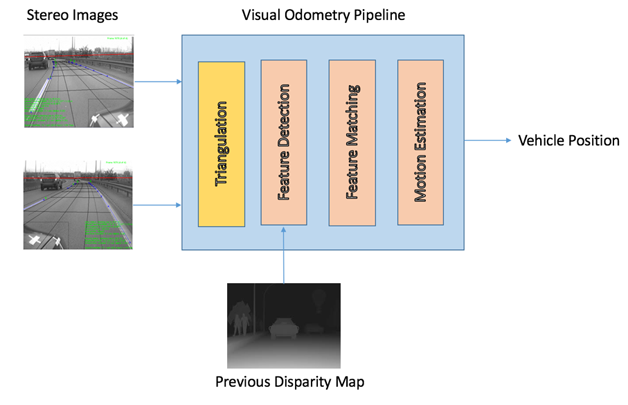
因此作为补充方案,摄像头也被用为定位。简化来说,如图3所示,基于视觉的定位由三个基本步骤组成:1. 通过对立体图像的三角
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1120
1120

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









