







一、驱动简介
Linux驱动分为字符设备驱动、块设备驱动、网络设备驱动
- 字符设备驱动
字符设备指必须以串行顺序依次访问的设备,如led、触摸屏、鼠标等
通过open、close、read、write等系统调用访问
- 块设备驱动
块设备可以按任意顺序访问,以块为单位进行操作,如硬盘、EMMC等
块设备和字符设备的驱动设计有很大的差异,但是也可以通过open、close、read、write等系统调用进行访问,不过一般都是使用文件系统来进行管理
- 网络设备驱动
网络设备是面向数据包的接收和发送设计的,在文件系统中并没有对应的设备结点,通过socket接口进行访问
本文主要讲解字符设备。
二、字符设备驱动概念
Linux下一切皆文件,例如一个led设备,在文件系统中表现为一个设备节点/dev/led,应用层通过open、read、write等系统调用就可以控制led
例如想让led亮,就打开设备文件写1
int fd;
int val = 1;
fd = open("/dev/led", xxx);
write(fd, &val, sizeof(val));这样就可以使得led被点亮了。
现在思考一个问题,为什么这样就可以使led点亮?
要想让led点亮,必须操作硬件,操作硬件这部分工作就是led的驱动所完成的
最简单的方式就是,应用层对led进行open操作,那么就对应led驱动程序中的一个led_open。应用层对led进行write操作,就对应led驱动程序的一个led_write操作,然后在led_write操作中去操控硬件,进而控制led
那么对led设备节点进行open、write系统调用,怎么才能调用到驱动程序的led_open、led_write呢?
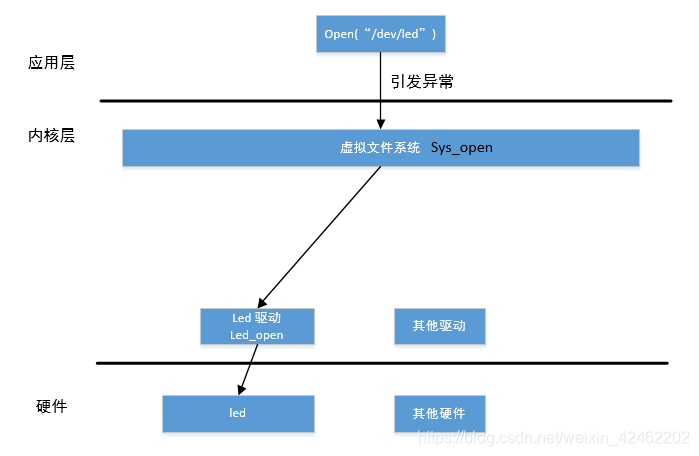
当应用层调用open、read、write等操作时,会引发一个异常,导致系统变为内核态,然后再去执行相应的系统调用sys_open、sys_read、sys_write等
在sys_open、sys_read、sys_write中会去找到相应的驱动程序,然后再调用驱动程序的open、read、write去操作硬件
如下图所示
那么在虚拟文件系统中调用sys_open,是怎么找到led驱动程序而不是其他驱动呢?
首先介绍一下设备号
每一个设备都有一个设备号,使用32位表示,其中高12位表示主设备号,低20位表示次设备号
使用ls /dev/led -l查看设备,可以得到下面信息
crw-rw---- 1 root 0 10, 131 Jan 1 12:00 /dev/led其中10, 131表示设备号,10表示主设备号,131表示次设备号
为了方便理解,我们可以认为内核中有一个字符设备数组,以主设备号为下标,字符设备本身为数组元素,字符设备中有一个文件操作集,设置了一系列的操作函数(如led_open、led_write、led_read)
sys_open等系统调用通过设备文件的主设备好找到数组中的一项,通过字符设备的文件操作集合调用到led驱动中的led_open等函数
字符设备驱动就是要完善这个fops(文件操作集),然后指定设备号,向内核注册字符设备。
三、注册字符设备
首先看一下字符设备对象
struct file_operations {
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
int (*open) (struct inode *, struct file *);
...
};
struct cdev {
struct kobject kobj;
struct module *owner; /* 所属模块 */
const struct file_operations *ops; /* 文件操作集 */
struct list_head list;
dev_t dev; /* 设备号 */
unsigned int count;
};其中的dev_t成员定义了设备号,为32位,高12位为主设备号,低20位为次设备号
内核使用下面两个宏获取主次设备号
MAJOR(dev_t dev) //主设备号
MINOR(dev_t dev) //次设备号使用下面该宏获取设备号
MKDEV(int major, int minor)每个字符设备都有自己对应的设备号范围,下面介绍怎么申请设备号
3.1 申请设备号
(1)动态分配
此函数指定次设备号和设备号个数,可以动态分配主设备号
/*
* dev:返回申请到的设备号
* baseminor:起始次设备号
* count:申请的设备号个数
*/
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count,
const char *name)
(2)静态分配
此函数必须主次设备号和设备号个数
/*
* from:起始设备号
* count:设备号个数
*/
int register_chrdev_region(dev_t from, unsigned count, const char *name)
在申请完设备号后,就可以利用此设备号去注册字符设备了。
3.2 注册字符设备
和字符设备相关的函数
void cdev_init(struct cdev *, struct file_operations *);
struct cdev *cdev_alloc(void);
void cdev_put(struct cdev *p);
int cdev_add(struct cdev *, dev_t, unsigned);
void cdev_del(struct cdev *);cdev_init:用来关联字符设备和fops,其中file_operations就是一个文件操作集,里面设置了一系列的操作函数(例如open、read、write)
cdev_alloc:分配一个字符设备对象
cdev_add:注册字符设备
cdev_del:注销一个字符设备
注册一个字符设备的步骤
struct cdev *cdev_alloc(void); //分配字符设备
void cdev_init(struct cdev *, struct file_operations *); //绑定一个fops
int cdev_add(struct cdev *, dev_t, unsigned); //将字符设备和申请到的设备号注册进内核
下面是一个简单的字符设备驱动
mydev.c
#include <linux/module.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/slab.h>
static dev_t dev_id;
static struct cdev *mydev;
ssize_t mydev_read(struct file *file, char __user *data, size_t size, loff_t * loff)
{
printk("mydev_read\n");
return 0;
}
ssize_t mydev_write(struct file *file, const char __user *data, size_t size, loff_t *loff)
{
printk("mydev_write\n");
return 0;
}
int mydev_open(struct inode *inode, struct file *file)
{
printk("mydev_open\n");
return 0;
}
/* 文件操作集合 */
static struct file_operations mydev_fops = {
.owner = THIS_MODULE,
.read = mydev_read,
.open = mydev_open,
.write = mydev_write,
};
static __init int mydev_init(void)
{
/* 申请设备号 */
alloc_chrdev_region(&dev_id, 1, 1, "mydev");
/* 分配字符设备 */
mydev = cdev_alloc();
/* 设置字符设备 */
cdev_init(mydev, &mydev_fops);
/* 注册字符设备 */
cdev_add(mydev, dev_id, 1);
/* 打印申请到的主次设备号 */
printk("major:%d; minor:%d\n", MAJOR(dev_id), MINOR(dev_id));
return 0;
}
static __exit void mydev_exit(void)
{
cdev_del(mydev);
kfree(mydev);
unregister_chrdev_region(dev_id, 1);
}
module_init(mydev_init);
module_exit(mydev_exit);
MODULE_LICENSE("GPL");
四、编译模块
编写以驱动程序后,我们应该如何编译驱动程序,有两种方法,一种是将驱动程序和内核编译到一起,一种是单独将驱动程序编写成模块。
这里介绍第二种
将驱动程序编译成模块需要编写Makefile
Makefile如下
KERN_DIR = /work/linux/kernel/
all:
make -C $(KERN_DIR) M=`pwd` modules
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order
obj-m += mydev.o
其中KERN_DIR = /work/linux/kernel/表示内核源码树,这个需要根据你自己内核所在的路径修改
obj-m += mydev.o表明要编译mydev.c文件
make -C $(KERN_DIR) M=pwd modules表明跳转到内核源码树,编译模块
将Makefile和mydev.c放到一起,执行make,可以得到驱动模块mydev.ko
五、加载模块
使用insmod xxx.ko可以加载驱动模块
使用lsmod可以查看当前加载的模块
使用rmmod xxx可以卸载已加载的驱动模块
将上面的生成的mydev.ko拷贝到实验平台,执行insmod mydev.ko
一旦加载模块,内核就会运行module_init(mydev_init)指定的模块入口,mydev_init函数中,我们申请的设备号,注册了字符设备,并打印了主次设备号
可以看到打印信息
major:250; minor:1表示主设备号250,次设备号1(你所看到的可能不同)
此时模块已经加载了,我们可以通过cat /proc/devices查看到我们已经注册了字符设备
但是在/dev目录下并没有生成设备节点,我们暂时还无法对设备进行操作,下面介绍如何创建设备节点
六、创建设备节点
创建设备节点分为手动创建和自动创建,下面分别介绍
(1)手动创建
在上面驱动程序打印出major:250; minor:1,我们可以利用这些信息来创建设备节点
通过下面命令创建设备节点
mknod 设备名 设备类型(字符:c,块:b) 主设备号 从设备号执行
mknod /dev/mydev c 250 1
运行后就生成了设备节点/dev/mydev
(2)自动创建
自动创建利用的是udev机制或者mdev机制,当驱动在/sys创建相关的设备信息时,udev或者mdev会根据这些信息创建设备节点
下面介绍创建设备节点
static struct class *mydev_class;
mydev_class = class_create(THIS_MODULE, "mydev"); //创建一个类
device_create(mydev_class, NULL, dev_id, NULL, "mydev"); //根据设备号创建设备节点
销毁设备节点
device_destroy(mydev_class, dev_id); //销毁设备节点
class_destroy(mydev_class); //销毁类
修改后的驱动
mydev.c
#include <linux/module.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/slab.h>
#include <linux/device.h>
static dev_t dev_id;
static struct cdev *mydev;
static struct class *mydev_class;
ssize_t mydev_read(struct file *file, char __user *data, size_t size, loff_t * loff)
{
printk("mydev_read\n");
return 0;
}
ssize_t mydev_write(struct file *file, const char __user *data, size_t size, loff_t *loff)
{
printk("mydev_write\n");
return 0;
}
int mydev_open(struct inode *inode, struct file *file)
{
printk("mydev_open\n");
return 0;
}
static struct file_operations mydev_fops = {
.owner = THIS_MODULE,
.read = mydev_read,
.open = mydev_open,
.write = mydev_write,
};
static __init int mydev_init(void)
{
/* 申请设备号 */
alloc_chrdev_region(&dev_id, 1, 1, "mydev");
/* 分配字符设备 */
mydev = cdev_alloc();
/* 设置字符设备 */
cdev_init(mydev, &mydev_fops);
/* 注册字符设备 */
cdev_add(mydev, dev_id, 1);
/* 打印申请到的主次设备号 */
printk("major:%d; minor:%d\n", MAJOR(dev_id), MINOR(dev_id));
mydev_class = class_create(THIS_MODULE, "mydev");
device_create(mydev_class, NULL, dev_id, NULL, "mydev");
return 0;
}
static __exit void mydev_exit(void)
{
device_destroy(mydev_class, dev_id);
class_destroy(mydev_class);
cdev_del(mydev);
kfree(mydev);
unregister_chrdev_region(dev_id, 1);
}
module_init(mydev_init);
module_exit(mydev_exit);
MODULE_LICENSE("GPL");
重新编译加载模块
查看/sys/dev/char目录,会发现多了一些信息250:1
此时查看ls /dev/mydev,会发现/dev目录已经有了mydev了
七、测试
每个驱动程序写完之后,都需要编写应用程序测试
下面是我们的测试程序
mydev_test.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
int main(int argc, char* argv[])
{
int val = 1;
int fd = open("/dev/mydev", O_RDWR);
write(fd, &val, sizeof(val));
read(fd, &val, sizeof(val));
return 0;
}
编译
arm-linux-gcc mydev_test.c加载模块
insmod mydev.ko执行测试程序
./a.out可以看到控制台打印
[ 2639.832633] mydev_open
[ 2639.833528] mydev_write
[ 2639.836014] mydev_read证明驱动程序正常
八、原文链接
本文转载自:Linux驱动入门(一)字符设备驱动基础_JT同学的博客-CSDN博客,感兴趣的同学可以去阅读该作者的其他文章。















 3296
3296











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









