










开源自:https://github.com/hjwang1/robot
1.视觉感知
一般性的物体识别、分割、曲面重建,Research about robot perceptions. Author: hjwang1@163.com, 此视觉感知算法,可以做3D人脸识别、手势识别,可延及一般性的物体识别、分割、曲面重建;这里开源的是视觉感知算法-学术研发版本,可达到实时性的商业版不在这里开源,有商业需求的朋友可以邮件联系我们。
1.1.本套算法是基于3D Sensor之上的视觉感知算法:
- 输入:PLY格式的物体或场景点云数据
- 中间输出:算法运行中会临时输出一些三角剖分的物体mesh数据,供分析、可视化查看
- 输出:JSON格式的视觉感知数据
1.2.点云数据由3D Sensor采集而来:
- 3D结构光Sensor
- TOF Sensor
- 双目视觉Sensor
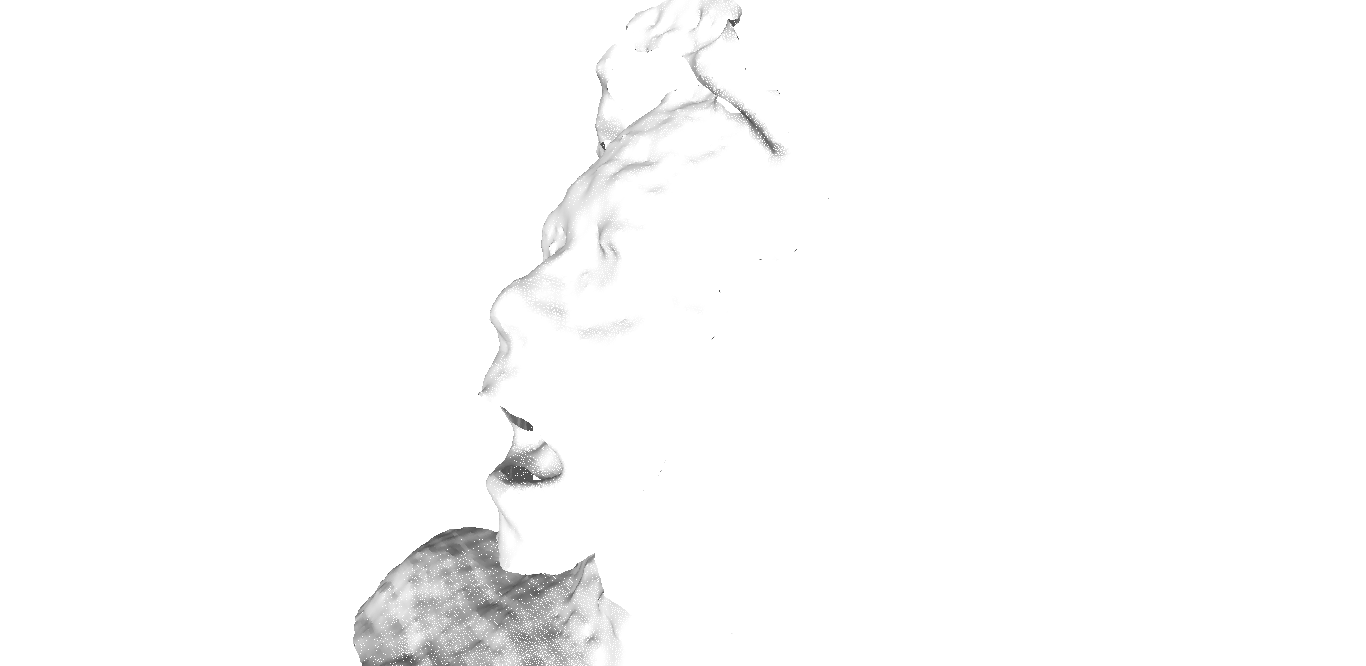
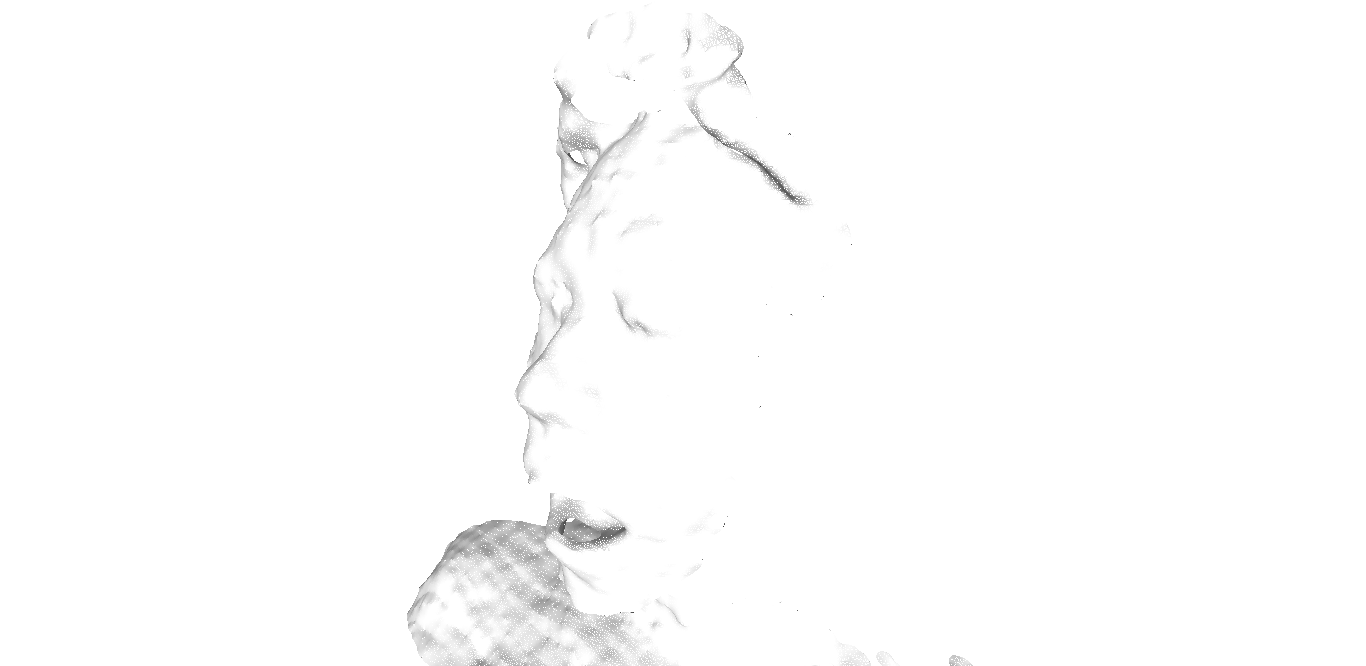
1.3.人脸曲面重建(Surface reconstruction)
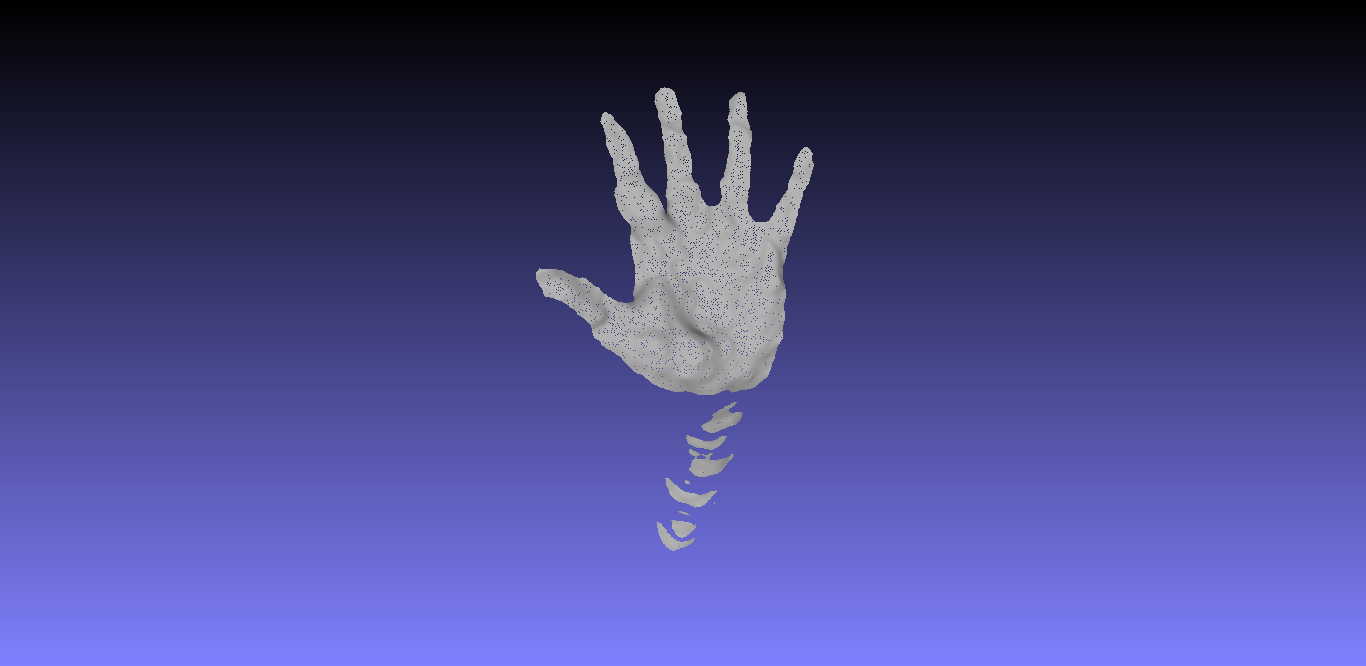
1.4.手势曲面重建(Surface reconstruction)
1.5.一般性物体曲面重建(Surface reconstruction)

1.6.视觉感知结果
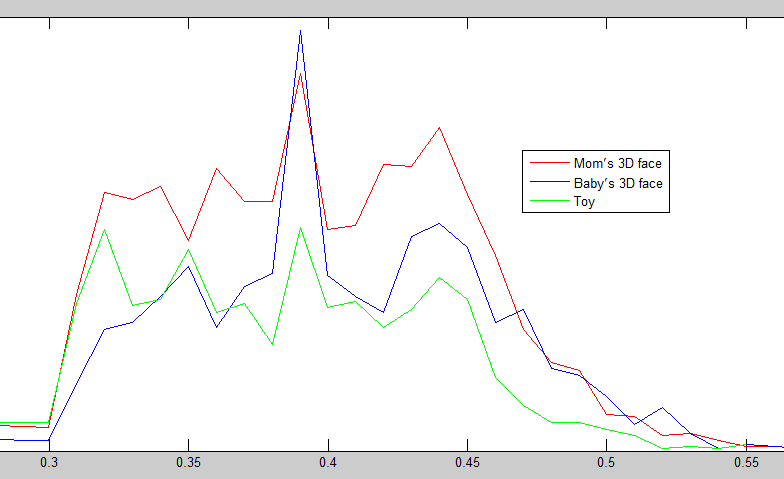
- 不仅仅可以做3D人脸识别、手势识别,可延及一般性的物体识别、分类
备注:上图中,红色曲线代表“一位妈妈的3D Face”,蓝色曲线代表“妈妈的孩子的3D Face”,曲线不同代表不同的人脸,绿色曲线代表玩具篮球,篮球的曲线与两条人脸曲线差距很大,从而可以把物体分类,人脸曲线的不同代表了不同的人,但是分布又比较近,可见是同一类。
1.7.算法的概要处理流程
- 已经拿到物体或场景的三维点云数据,格式是PLY
- 降噪滤波等预处理
- 曲面triangle mesh重建
- 多分辨率视觉感知处理
- matlab可视化查看处理结果
备注:本人是用Orbbec的3D结构光Sensor采集,3D Sensor与OPPO Find X手机同款,也可以使用微软的kinect、Intel的RealSense等,也可以用业界公开的点云数据进行测试使用;曲面重建的方法可以用Delauney三角剖分、Poisson等方法,有能力研究者可以使用更好的曲面重建算法自行替代;matlab可视化查看源码是简单些,有特别需求的研究者可自行根据所求编写。
2.使用步骤
2.1. 准备编译环境
- ubuntu16.04 64位
2.2. 必要与可选库的安装
- vcglib下载安装,可参考本目录下的子目录vcglib,里有详细说明
- pcl,本目录下的子目录distrib里自带了1.8.1版本, BSD license
- jsoncpp,本目录下的子目录distrib里自带了1.8.3版本,MIT license
- openmesh,本目录下的子目录distrib里自带了6.3版本,BSD license
- eigen3下载安装,可参考本目录下的子目录eigen3,里有详细说明,MPL2 license
- poisson reconstruction10.02,本目录下的子目录distrib里自带了,MIT license
- libaiethan.a,视觉感知的必要数据结构与基本算法库,本目录下的子目录distrib里自带
- libaiethantool.a,视觉感知必要算法库,本目录下的子目录distrib里自带
- triangle,可选库,libtriangle_shared,本目录下的子目录distrib里自带
备注:本lib triangle 来自:http://www.cs.cmu.edu/~quake/triangle.html 部分lib库可在https://pan.baidu.com/s/1tRpf5xaJcXBOGIc-XIIquw 下载,其他没有提供的请自行安装
2.3. 编译(compile and build)
已经自带了CMakeList.txt文件,lib库与头文件全部安装完成后,要合理配置CMakeList.txt文件,通过cmake工具编译构建请务必完整仔细阅读源码visdetectpoisson.cpp,合理修配置与相关参数
- 进入robot目录
mkdir build
cd build
cmake ..
- 编译后生成可执行程序:visdetectpoisson
2.4. 配置文件
2.4.1.scancrawler.json
- srcdir: 待处理3D点云文件的所在目录
- src: 字符串,3D点云文件的前辍,格式是:前辍+序号+“.ply”,
- filterdir: 滤波后的3D点云文件的所在目录
- filtered: 滤波后的3D点云文件的前辍,格式是:前辍+序号+“.ply”,
- importdir: 最终处理结果JSON文件的所在目录
- import: 最终处理结果JSON文件的前辍,格式是:前辍+序号+时间戳+“.json”,
- startindex: 3D点云文件批量文件的连续序号的最小值
- endindex: 3D点云文件批量文件的连续序号的最大值
- directed_by: 3D点云文件的创造者
- id: 3D点云文件的唯一识别号
- initial_release_date: 3D点云文件的生成日期
- name: 3D点云文件所代表的物体的名称
- content: 3D点云文件所代表物体的概要描述
- lenth_d: 3D点云文件所代表物体的长度
- width_d: 3D点云文件所代表物体的宽度
- height_d: 3D点云文件所代表物体的高度
- vsize_d: 3D点云文件所代表物体的体积
- vprefix_s: 3D点云文件所代表物体的类别号
- vsuffix_s: 3D点云文件所代表物体的类别号
- shap: 3D点云文件所代表物体的形状
- color: 3D点云文件所代表物体的颜色
- material: 3D点云文件所代表物体的材质
- phase: 3D点云文件所代表物体的相态
- note: 其他备注
备注:对于如下的文件名“hjwhand-10004.ply”,前辍是“hjwhand-”,序号是“10004”
2.4.2.scaninfo.json
- threshold: 连通点云的最小顶点数
- filter_*: 物体3D点云的三维Box边界切割
- distance: triangle mesh中,edge的最大长度,在部分算法中使用此值
- Niters: 对mesh平滑操作的次数,在部分算法中使用此值
- key_i: 用哪一类特征数据参与算法计算,在部分算法中使用此值
- inf_i: 最小一级视觉感知分辨率,分辨率范围[3,10]
- sup_i: 最大一级视觉感知分辨率,分辨率范围[3,10]
2.5. 程序分解说明
- 程序的详细说明请参考源码注释
- 编译运行之前,请务必对源程序里的相关配置进行合理设置
2.6. 运行测试
- 根据实际的待处理3D点云文件,对两个配置文件进行合理的配置
- 运行可执行程序visdetectpoisson
备注:运行时,要注意lib库的链接路径设置,运行完成后,会在指定目录生成与3D点云文件相对应的视觉感知结果,以JSON文件存储感知结果
2.7. 视觉感知结果分析
- 在meshlab或其它的工具上可以查看中间处理结果,如1.3~1.5节的曲面重建等
- 在Matlab R2013b(或以上)打开diffdis.m文件
- 在diffdis.m文件中合理设置视觉感知结果JSON文件的路径
- 在Matlab中运行diffdis.m,就可以得到如1.6节中所示的图
- 每条曲线代表一个物体,从而进一步做物体识别、分类等后续工作















 2776
2776











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











