






一,volatile是否可以修饰const?
1, const最主要的特点就是只读,有常量、常量指针; volatile关键字是一个类型修饰符,用它声明的类型变量表示可以被某些编译器未知的因素更改;const经常用于声明不希望被其它程序修改的常量;volatile经常用于声明因意外而可能发生改变的变量。
2, volatile
一个定义为volatile的变量是说该变量可能会被意想不到地改变,这样,编译器就不会去假设该变量的值了。精确地说,优化器在用到该变量时必须每次都小心地重新读取这个变量的值,而不是使用保存在寄存器里的备份。下面是volatile变量的几个例子:
(1) 并行设备的硬件寄存器(如:状态寄存器)
(2) 一个中断服务子程序中会访问到的非自动变量
(3) 多线程应用中被几个任务共享的变量
3,举例提问
(1) 一个参数既可以是const还可以是volatile吗?解释为什么。
答:是的。一个例子是只读的状态寄存器。它是volatile因为它可能被意想不到地改变。它是const因为程序不应该试图去修改它。
(2) 一个指针可以是volatile 吗?解释为什么。
答:是的。尽管这并不很常见。一个例子是当一个中服务子程序修该一个指向一个buffer的指针时。
(3) 下面的函数有什么错误:
int square(volatile int *ptr)
{
return *ptr * *ptr;
}
答:这段代码的目的是用来返回指针*ptr指向值的平方,但是,由于*ptr指向一个volatile型参数,编译器将产生类似下面的代码:
int square(volatile int *ptr)
{
int a,b;
a = *ptr;
b = *ptr;
return a * b;
}
由于*ptr的值可能被意想不到地改变,因此a和b可能是不同的。结果,这段代码可能返不是你所期望的平方值!正确的代码如下:
long square(volatile int *ptr)
{
int a;
a = *ptr;
return a * a;
}
二,如何直接访问硬件寄存器?
在Linux系统中,直接访问硬件寄存器通常通过`/dev/mem`设备进行。这是一个虚拟字符设备,它提供了对物理内存的访问,包括硬件寄存器。以下是访问硬件寄存器的基本步骤:1
- 打开
/dev/mem设备:使用open函数以读写模式(O_RDWR)打开/dev/mem设备。 - 映射物理内存到用户空间:通过
mmap函数将物理内存(包括硬件寄存器)映射到用户空间。 - 访问映射的内存:一旦内存被映射,就可以像访问普通内存一样访问这些物理地址,从而实现对硬件寄存器的读写操作。
三:如何最快找出一组寄存器里多少1?
答:在C语言中,可以通过位操作来快速找出一个寄存器中有多少个1。这里提供一种通用的方法,使用位移和位与操作来逐位检查寄存器中的位。
#include <stdio.h>
int count_ones(unsigned int reg) {
int ones = 0;
for (int i = 0; i < sizeof(reg) * 8; i++) {
//通过将整数与1左移i位后相与,来检查每一位是否为1
if (reg & (1 << i)) {
ones++;
}
}
return ones;
}
int main() {
unsigned int reg = 0xF0AA; // 示例寄存器值
int ones = count_ones(reg);
printf("Number of ones: %d\n", ones);
return 0;
}四:如何降低功耗?
-
优化硬件设计:选择低功耗的芯片、使用更高效的转换器、减少功率损耗等方式来优化硬件设计,从而降低功耗。此外,还可以考虑使用低功耗的组件,如低功耗的CPU和内存,或使用低功耗的显示屏幕。
-
优化软件算法:通过优化软件算法,减少处理器的计算量,从而降低功耗。例如,使用低功耗的排序算法或图形处理算法。
-
休眠模式:对于不需要时时采集数据的设备,采用休眠模式,降低功耗。
-
动态调整采样率:根据需要采集数据的频率来动态调整采样率,降低功耗。
-
优化供电方案:选择更高效的供电方案,如使用更高效的电源供应器、降低电源电压等方式来降低功耗。
-
压缩数据传输:采用数据压缩算法可以降低传输数据的量,从而降低功耗。
-
优化通信方式:选择更低功耗的通信方式,如蓝牙低功耗等方式来降低功耗。
-
使用门控时钟:降低活动因子是降低功耗的有效办法,如果一个电路的时钟完全关断,那么它的活动因子和动态功耗将降为0。
-
减小毛刺:毛刺会增大活动因子,有可能使门的活动因子增加到1以上。
-
减小负载电容:缩短连线长度,良好的平面规划和布局可以使连线电容减小。选择较小的逻辑级数以及较小的晶体管可以减小器件的翻转电容。
-
电压域:将芯片划分成多个电压域,每个电压域可以根据特定电路的需要进行优化。例如,对于存储器采用高电源电压来保证存储单元的稳定性,对于处理器采用中等大小的电压,对运行速度较低的IO外围电路采用低电压。
-
动态电压调整(DVS):对于低性能要求的任务,可以使时钟频率降低到足以按预定时间完成任务的最低值,然后使电压降低到该频率下工作所需要的最小值就可以节省大量的能耗。
-
降低频率:动态功耗正比于频率,芯片只应当工作在所要求的频率下,不能比所要求的还要快。
-
谐振电路:通过使能量在储能元件如电容或电感之间来回传送而不是将能量泄放来来减小翻转功耗。
五:什么时候会用到do{}while(0)?
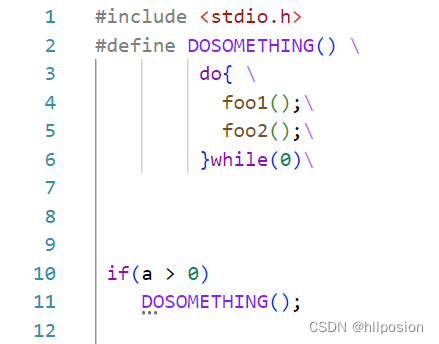
1、辅助定义复杂的宏,避免引用的时候出错:
例如:
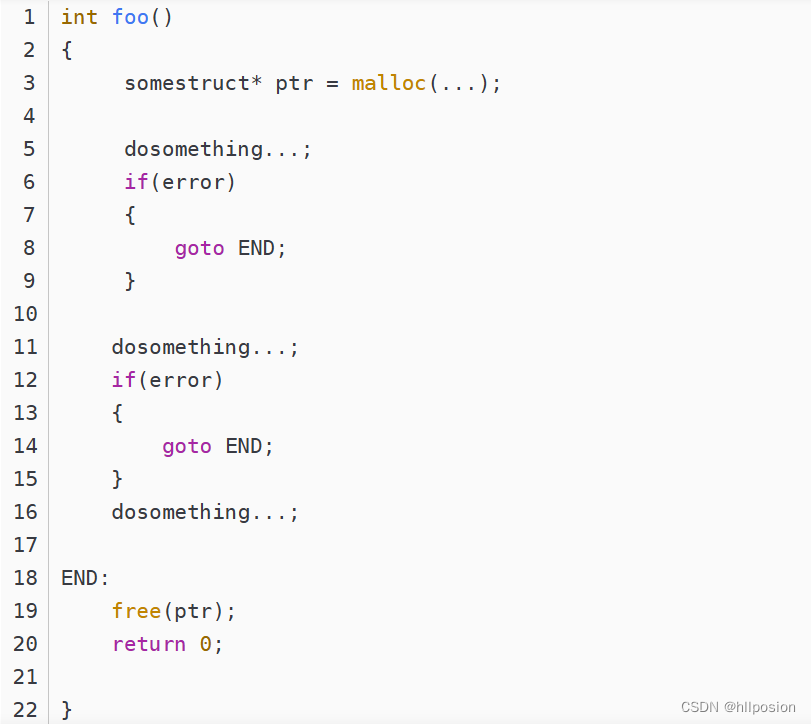
2、避免使用goto对程序流进行统一的控制:
有些函数中,在函数 return 之前我们经常会进行一些收尾的工作,比如 free 掉一块函数开始 malloc 的内存,goto 一直都是一个比较简便的方法:
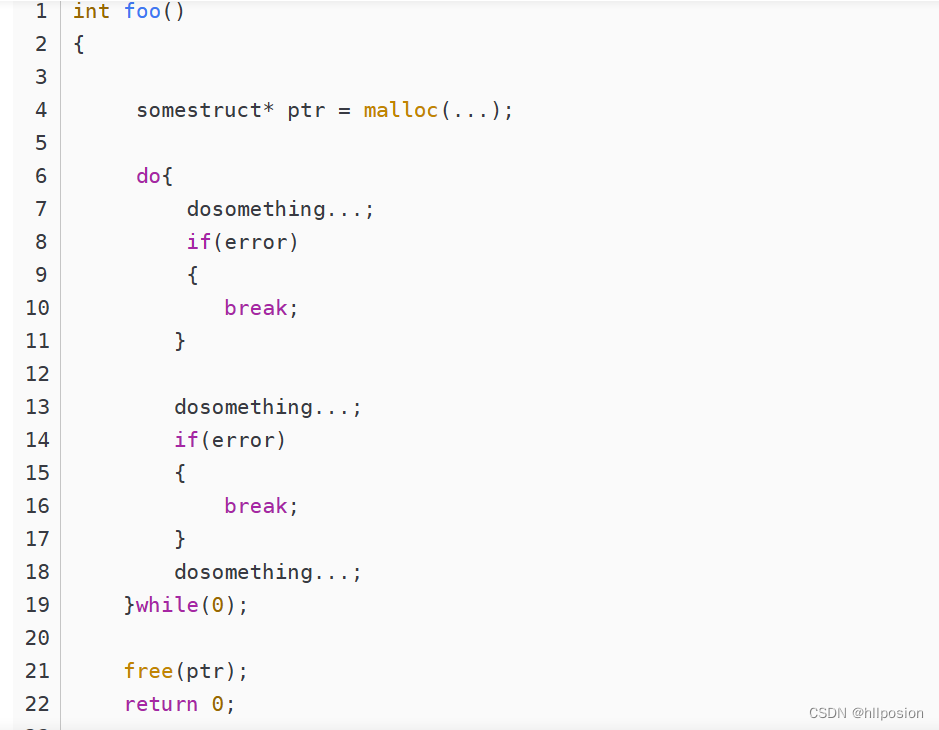
由于 goto 不符合软件工程的结构化,而且有可能使得代码难懂,所以很多人都不倡导使用,那这个时候就可以用 do{}while(0) 来进行统一的管理:
3、避免空宏引起的warning
内核中由于不同架构的限制,很多时候会用到空宏,在编译的时候,空宏会给出 warning ,为了避免这样的warning,就可以使用 do{}while(0) 来定义空宏:
#define EMPTYMICRO do{}while(0)
4、定义一个单独的函数块来实现复杂的操作:
当你的功能很复杂,变量很多你又不愿意增加一个函数的时候,使用 do{}while(0); ,将你的代码写在里面,里面可以定义变量而不用考虑变量名会同函数之前或者之后的重复。
六,GPIO有几种状态?
1、输入状态
(1)、浮空输入:IO口的内部既不解上拉电阻也不接下拉电阻,这样IO口的状态是一种不确定性。
(2)、上拉输入:IO口的内部接上拉电阻
(3)、下拉输入:IO口的内部接下拉电阻
(4)、模拟输入:模拟输入是指传统方式的输入,数字输入是输入PCM数字信号,即0,1的二进制数字信号,通过数模转换,转换成模拟信号,经前级放大进入功率放大器,功率放大器还是模拟的。一般用于AD检测
2、输出状态
(1)、推挽输出:相当于两个三极管互补工作,不管输出寄存器给高还是低,总有一个三极管导通
(2)、开漏输出:
- 路径:通过设置位设置/清除寄存器或者输出数据寄存器的值,途经只有N-MOS管,最终输出到I/O端口。
-
当设置输出的值为高电平的时候,N-MOS管处于关闭状态,此时I/O端口的电平就不会由输出的高低电平决定,而是由I/O端口外部的上拉或者下拉决定;
当设置输出的值为低电平的时候,N-MOS管处于开启状态,此时I/O端口的电平就是低电平。
I/O端口的电平也可以通过输入电路进行读取;注意,I/O端口的电平不一定是输出的电平。
(3)、复用推挽输出:此时IO受内部外设控制,比如定时器的PWM,比如SPI的MOSI,MISO等。 而普通的推挽输出,则IO受ODR控制。
(4)、复用开漏输出:参考复用推挽
七,如何软件处理硬件管脚抖动?
软件去抖动是一种常见的技术,用于处理由于机械开关或按键操作而引起的信号抖动。这种抖动可能会导致系统错误地识别多次触发,因此需要软件层面的处理来确保稳定的输入信号。以下是几种常见的软件去抖动方法及其详细说明:
1. 延时去抖动(Delay-Based Debouncing)
延时去抖动的思想是在检测到信号变化后,等待一段时间以确保信号稳定后再进行响应。这段延时时间应该大于预期的抖动时间。
示例代码(伪代码):
def debounce_delayed(signal):
# 初始化上一次稳定信号时间戳和延时时间
last_stable_time = current_time()
debounce_delay = 50 # 假设稳定延时为50毫秒
while True:
if signal.changed():
last_stable_time = current_time() + debounce_delay
# 如果当前时间超过了上一次稳定时间加上延时时间,则认为信号已稳定
if current_time() > last_stable_time:
process_signal()
2. 滤波去抖动(Filter-Based Debouncing)
滤波去抖动利用滤波器(如低通滤波器)平滑信号的变化,从而消除高频抖动,只保留低频稳定的信号变化。
示例代码(伪代码):
def debounce_filtered(signal):
# 初始化滤波器参数
filtered_value = signal.value()
alpha = 0.2 # 假设滤波器系数为0.2
while True:
current_value = signal.value()
filtered_value = alpha * current_value + (1 - alpha) * filtered_value
if filtered_value != previous_filtered_value:
process_signal()
previous_filtered_value = filtered_value
3. 状态机去抖动(State Machine Debouncing)
状态机去抖动通过定义状态转换来管理信号的稳定性,只有在信号连续保持稳定一段时间后才认定为有效触发。
示例代码(伪代码):
class DebounceStateMachine:
def __init__(self):
self.state = 'WAIT_LOW'
self.transition_time = 20 # 假设状态转换时间为20毫秒
def process_signal(self, signal):
if self.state == 'WAIT_LOW' and signal.is_high():
self.state = 'WAIT_HIGH'
self.transition_start_time = current_time()
elif self.state == 'WAIT_HIGH' and signal.is_low():
self.state = 'WAIT_LOW'
self.transition_start_time = current_time()
elif self.state == 'WAIT_HIGH' and signal.is_high() and current_time() - self.transition_start_time > self.transition_time:
process_signal()八,如何高效处理中断?
中断处理的基本概念
中断是计算机系统中一种机制,允许硬件或软件优先级更高的事件(如硬件设备发出的信号或异常条件)打断当前正在执行的程序,以便立即处理这些事件。中断的目的是确保及时响应和处理重要事件,而不需要程序轮询或长时间等待。
高效处理中断的关键要素
-
中断响应时间:是指从中断事件发生到开始执行中断处理程序的时间。响应时间的短暂性是高效处理中断的首要目标,尤其对于需要实时响应的系统至关重要。
-
中断处理程序的执行时间:是指中断处理程序完成对中断事件响应并返回到中断被打断的程序之间的时间。执行时间的短暂性直接影响系统的响应速度和整体效率。
-
中断的优先级和管理:不同的中断可能有不同的优先级,操作系统或硬件需要能够正确地管理和调度中断,确保高优先级的中断可以及时被处理,而低优先级的中断不会影响到关键任务的执行。
设计高效中断处理的步骤和技术
1. 中断服务程序(ISR)的设计
-
简洁和高效的代码:ISR 应当设计简洁,避免复杂的逻辑和长时间的执行。通常,ISR 应该尽快完成对中断事件的处理,然后尽快返回。
-
避免阻塞和延迟:ISR 应当避免使用会引起阻塞或延迟的操作,如长时间的数据传输、大量的计算或等待资源释放。
-
数据的快速处理:尽可能减少在ISR 中对数据的处理,可以将数据的拷贝或者其他处理操作推迟到主程序中完成。
2. 中断控制器和优先级管理
-
合理的中断控制器配置:配置中断控制器以适应系统的需求和性能要求。现代处理器通常提供灵活的中断控制器设置,可以根据需要分配中断的优先级和处理方式。
-
中断嵌套和屏蔽:允许中断嵌套和中断的屏蔽是管理多个中断同时发生的关键。确保高优先级的中断可以打断正在处理的低优先级中断,并根据需要屏蔽其他中断,以确保操作系统的稳定性和可预测性。
3. 系统资源的合理分配和利用
-
优化硬件资源:确保系统的硬件资源(如内存、总线带宽等)能够有效地支持中断的快速处理。优化内存布局和使用高速缓存可以显著提升中断处理效率。
-
软件优化:使用高效的数据结构和算法来管理和处理中断。例如,使用队列来缓冲中断事件,以便于主程序按需处理,减少中断处理程序的复杂度和执行时间。
4. 调试和优化
-
性能分析和调试工具:使用性能分析工具(如性能分析器、调试器)来识别和优化中断处理程序中的性能瓶颈和潜在问题。
-
实时系统的需求:如果系统需要实时性能,确保中断处理时间在确定的时间限制内完成,避免任何可能导致不可预测响应时间的情况。
九,中断时可否睡眠?
1.中断处理的时候,不应该发生进程切换,因为在中断context中,唯一能打断当前中断handler的只有更高优先级的中断,它不会被进程打断(这点对于softirq,tasklet也一样,因此这些bottom half也不能休眠),如果在中断context中休眠,则没有办法唤醒它,因为所有的wake_up_xxx都是针对某个进程而言的,而在中断context中,没有进程的概念,没有一个task_struct(这点对于softirq和tasklet一样),因此真的休眠了,比如调用了会导致block的例程,内核几乎肯定会死.
2.schedule()在切换进程时,保存当前的进程上下文(CPU寄存器的值、进程的状态以及堆栈中的内容),以便以后恢复此进程运行。中断发生后,内核会先保存当前被中断的进程上下文(在调用中断处理程序后恢复);
但在中断处理程序里,CPU寄存器的值肯定已经变化了吧(最重要的程序计数器PC、堆栈SP等),如果此时因为睡眠或阻塞操作调用了schedule(),则保存的进程上下文就不是当前的进程context了.所以不可以在中断处理程序中调用schedule()。
3.2.4内核中schedule()函数本身在进来的时候判断是否处于中断上下文:
i f(unlikely(in_interrupt()))
BUG();
因此,强行调用schedule()的结果就是内核BUG,但我看2.6.18的内核schedule()的实现却没有这句,改掉了.
4.中断handler会使用被中断的进程内核堆栈,但不会对它有任何影响,因为handler使用完后会完全清除它使用的那部分堆栈,恢复被中断前的原貌.
5.处于中断context时候,内核是不可抢占的,因此,如果休眠,则内核一定挂
十,如何设计RAM和flash的验证工具?
设计RAM(随机存取存储器)和Flash(闪存)的验证工具涉及到确保这些存储设备在硬件和软件层面功能正常、性能稳定的过程。
RAM 验证工具设计
-
功能需求定义:
- 读写功能验证:确保RAM能够按照预期读写数据。
- 数据完整性检查:验证数据在RAM中的存储和检索的准确性。
- 速度和时序测试:测量RAM的访问速度和响应时间,确保在不同负载下表现稳定。
-
设计实现步骤:
- 开发测试用例:根据RAM的规格书编写测试用例,包括基本读写操作、连续读写、随机访问等。
- 数据模式生成:生成不同模式的数据模式,如随机数据、模式填充数据,以测试RAM的容错性和稳定性。
- 时序分析工具:使用示波器或逻辑分析仪来捕获和分析RAM的时序特性,验证读写操作的时序满足设定要求。
-
软件实现:
- 编写验证程序:使用编程语言(如C/C++、Python)编写验证软件,通过读写RAM地址来执行测试用例。
- 数据校验:在读取数据后,对比实际数据和期望数据,确保一致性。
- 性能测试:通过在不同负载下运行,测量RAM的响应时间和吞吐量,评估性能。
-
报告和分析:
- 结果记录:记录每个测试用例的结果,包括通过的和失败的。
- 问题分析:分析失败的测试用例,确定是硬件故障还是软件问题,并提供问题排查和修复建议。
Flash 验证工具设计
-
功能需求定义:
- 擦除和编程功能验证:确保Flash能够正确擦除和编程数据。
- 数据保持能力检查:验证数据在Flash中的长期保持性。
- 坏块管理测试:测试Flash的坏块管理算法和功能。
-
设计实现步骤:
- 开发擦除和编程测试用例:编写用于擦除、编程和读取数据的测试用例。
- 数据模式生成:生成不同的数据模式来测试Flash的数据存储能力和健壮性。
- 坏块模拟:模拟坏块,测试Flash的坏块管理策略。
-
软件实现:
- 编写验证程序:使用低级接口(如JTAG、SPI、I2C等)编写Flash验证软件,执行擦除、编程和读取操作。
- 数据校验:验证编程后的数据与期望数据的一致性。
- 保持测试:在不同温度和电压条件下测试Flash数据的长期保持能力。
-
报告和分析:
- 记录和分析结果:记录每个测试用例的执行结果和性能数据。
- 异常处理:分析潜在的问题并提供解决方案,包括硬件修复或软件优化。
















 1698
1698











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









