










什么是RTK?
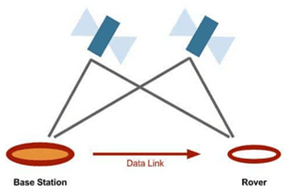
实时动态载波相位差分技术(RTK)是通过测试来纠正当前卫星导航(GNSS)系统常见误差的应用。RTK定位基于至少两个GNSS接收机——参考站和一个或多个流动站。
参考站在可视卫星中获取测量数据,然后将这些数据和它的位置一起广播给流动站。流动站收集卫星的测量数据,并将其与参考站数据一起处理,估计其相对于参考站的位置。
GNSS载波相位信号是通过RTK实现厘米级定位精度的关键。载波相位测量就像从参考站和流动站的天线到卫星的精确磁带测量。在接收器中,载波相位测量是以毫米级精度进行的。尽管载波相位测量是高度精确的,但它们包含一个未知的偏差,称为整数周期模糊性或载波相位模糊性。流动站必须在开机时解决或初始化载波相位模块,并且在每次卫星信号中断时解决。
支持的消息格式
RTCM3.3
RTCM3.3(也称为RTCM 10403.3,差分GNSS服务(版本3))由国际海运事业无线电技术委员会(The Radio Technical Commission for Maritime Services)制定,描述了差分修正数据传输的协议,允许GNSS接收机以更高的精度计算其位置。
RTCM3.3信息中包含的数据包括由参考站进行的载波相位和伪距测量。参考站是一个GNSS接收器,它像通常的接收器一样处理GNSS信号,但位置是预先知道的,且具有出色的精度。RTCM3.3数据从参考站传输到另一个GNSS接收器("流动站"),使该接收器能够补偿其测量误差,从而提高其定位精度。
Skydel⽀持的 RTCM3 消息:
- 1006(基站位置消息)
- 1033(接收机和天线描述)
- MSM3消息【Multiple Signal Messages:多信号电文组】:
- 1073((MSM3 GPS)
- 1083 (MSM3 GLONASS)
- 1093 (MSM3 Galileo)
- 1123 (MSM3 BeiDou)
- 1113 (MSM3 QZSS)
- 1133 (MSM3 IRNSS)
- MSM7消息:
- 1077 (MSM7 GPS)
- 1087 (MSM7 GLONASS)
- 1097 (MSM7 Galileo)
- 1127 (MSM7 BeiDou)
- 1117 (MSM7 QZSS)
- 1137 (MSM7 IRNSS)
NTRIP
NTRIP(RTCM通过互联⽹协议的⽹络传输)是⼀种⽤于通过⽹络(包括互联⽹)传输RTCM数据的协议。
NTRIP(通过NTRIP协议将RTCM3数据流式传输到客⼾端)。能够将RTCM3数据写⼊⼆进制或⼗六进制⽂件。
RTCM插件
虹科Safran Skydel RTCM插件允许模拟来⾃基站的RTCM 3.3消息,⽆需为基站接收器⽣成真实的射频信号。RTCM消息可以通过串行端⼝连接或NTRIP从Skydel应⽤程序流式传输到流动站接收器,其中,需要应⽤程序的两个实例来模拟基站和流动站的GNSS星座,但只有⽤于流动站的实例需要连接到接收器的真实射频输出,而⽤于基站仿真的实例可以配置为使⽤“NoneRT”输出。
在后续版本中可能会添加⼀种新模式,在没有RF硬件的情况下为基站仿真提供更好的性能。Skydel实例必须使⽤“同步模拟器”功能进行同步,以模拟相同的时间和相同的卫星轨道。RTCM插件允许RTCM3数据流式传输到串行端⼝(COM 端⼝)或使⽤NTRIP协议的⽹络。根据选择的RTCM3输出类型,可以使⽤不同连接⽅案。
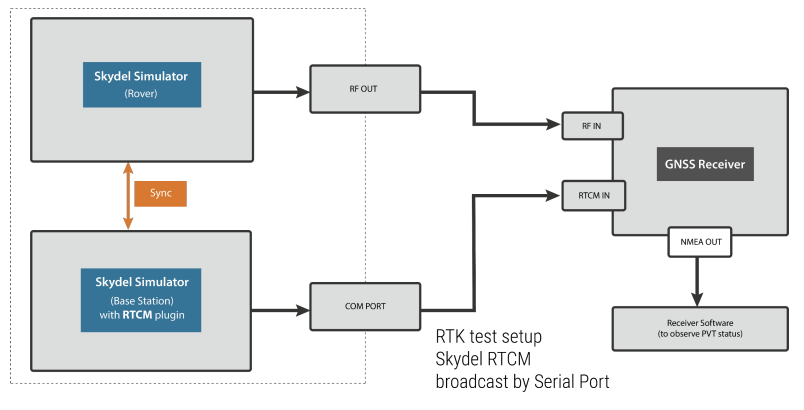
串口连接
⼀般来说,如果想将RTCM3消息流式传输到串行端⼝并同时能够观察接收器状态(位置解决⽅案),将需要⾄少具有两个接⼝的接收器, ⼀个⽤于RTCM3消息,另⼀个⽤于NMEA(或其他)协议输出。
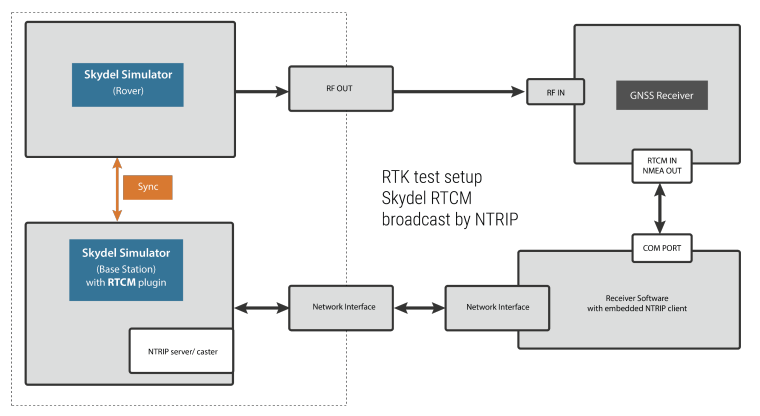
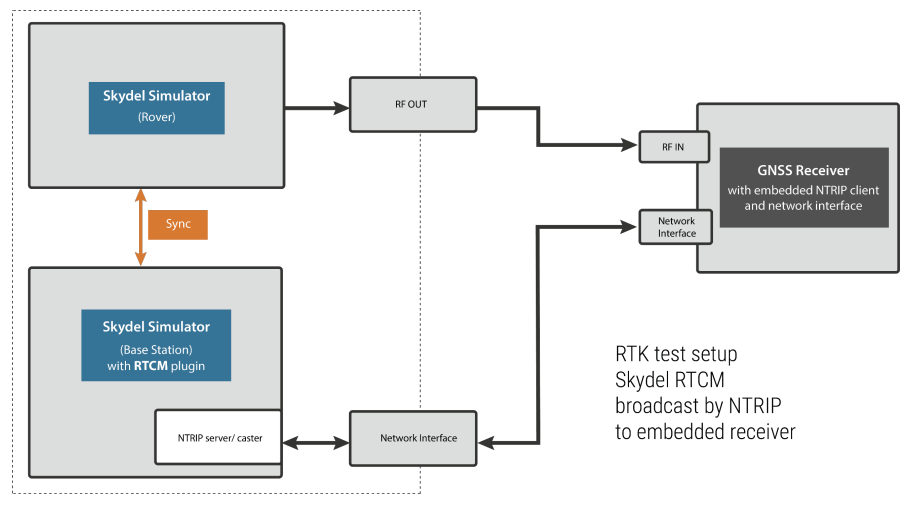
NTRIP连接
如果想使⽤NTRIP传输RTCM数据,需要有NTRIP客⼾端软件来与插件中的NTRIP caster通信。NTRIP客⼾端可以是专⻔的NTRIP软件,来⾃接收器供应商的软件,或者NTRIP客⼾端可以嵌⼊到具有⽹络接⼝的接收器中。
在下期文章中,我们将为大家展示RTK使用实例,如何通过两种不同的方法来模拟RTCM的使用。















 2325
2325











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









