







 MYO臂环通过捕捉用户手臂肌肉的生物电变化进行体感控制,利用eEMG技术识别手势。它包含8个生物电传感器单元和六轴传感器,支持多种操作系统。虽然MYO提供了一种无线、无场地限制的交互方式,但其技术尚不成熟,存在误操作和佩戴舒适度问题。
MYO臂环通过捕捉用户手臂肌肉的生物电变化进行体感控制,利用eEMG技术识别手势。它包含8个生物电传感器单元和六轴传感器,支持多种操作系统。虽然MYO提供了一种无线、无场地限制的交互方式,但其技术尚不成熟,存在误操作和佩戴舒适度问题。
MYO的工作原理与之前所介绍的体感交互方式都不同,它是通过捕捉用户手臂肌肉的生物电变化来进行体感控制的设备。MYO使用的eEMG(表面肌电图)技术最早应用在航空领域,当使用者在前臂上带上MYO并执行不同的手势时,前臂上的肌肉会发射出各不相同的电子信号,MYO内置的高敏传感器捕捉到这些信号,并通过嵌入式算法进行处理,进而识别出不同的手势,通过蓝牙将手势指令发送到主机。目前MYO可以识别出用户的握拳、左右挥动手臂、平摊双手甚至是手指的动作。但由于肌肉信号十分微弱,所以MYO的核心技术在于肌肉电信号的采集与处理。
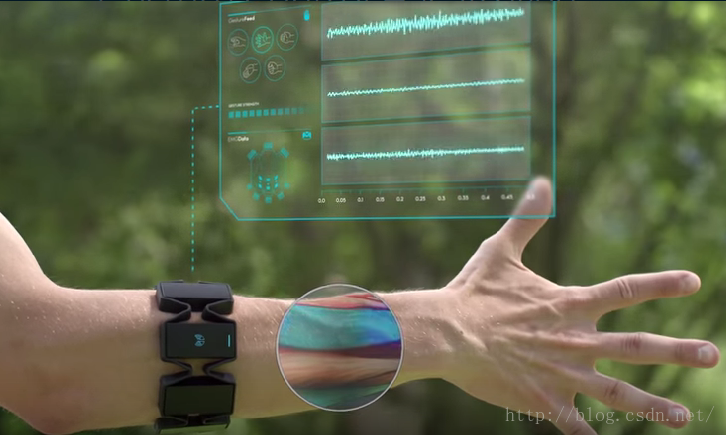
MYO工作原理
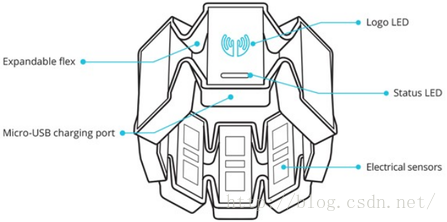
MYO结构图
MYO主要由8块大小厚薄不一的生物电传感器单元组成,每个传感器又分为三个电极。24个电极就是MYO捕捉用户手臂肌肉运动时产生的生物电变化的关键所在。除了8个传感器&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8292
8292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









