









也是来源于《深度学习入门——基于Python的理论与实现》附加代码,书中只是给了BN的对比结果,展示了BN的效果,没有再赘述实现(可能因为有点复杂),所以这里研究一下BN的代码。
之前我曾经使用过TensorFlow的BN,它提供了两三种接口,透明程度和使用方法不相同,有的是透明到你可以自定义参数并传给BN层,然后训练参数,也有只定义一个层,全自动使用的,但是都没有自己纯手写一个python实现更透彻。而且TensorFlow有很多高级封装和其他功能的整合,乱花渐欲迷人眼。不如来一个纯版的实现更好。
关于理论基础,这里就不赘述了,先将x归一化,再通过学习到的参数缩放平移x,达到分布归一与分布还原拟合的trade-off,公式如下:
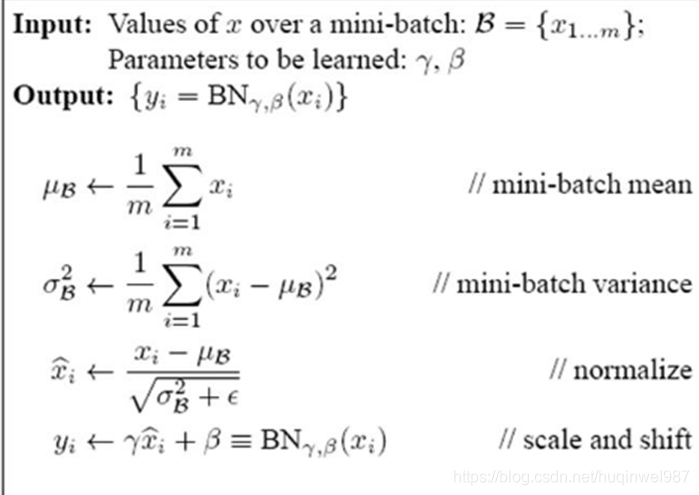
可以看到,正向传播有两个计算参数mu和sigma,然后完成其余归一化计算,最后再通过两个可学习参数beta和gamma进行分布恢复。
反向传播,反向传播有两个关注点,计算gamma和beta的梯度,以便进行更新;计算对输入(x)的梯度,以便完成梯度的传导工作。
如果是工程版的实现,根据Tensorflow接口的功能,还应该分训练和测试阶段,训练阶段应该进行一个mu(mean)和sigma(var)的总平均值的更新。这个好像没悬疑,必须要有的,没有就不完整(失去了降噪和降低过拟合的功能)
实现框架,类似本书其他网络层,实现一个BN类封装,包含初始化、正向传播、反向传播等函数。
其实难点就是把公式逐步拆解,再把所有的导数公式都找出来,这一步最好在纸上做。给每个中间变量都想好名字。
因为考虑不一定周到,比如维度(convNet默认(N,C,H,W)),时间关系,我就不重新造轮子了,主要是先自己列个大纲和伪代码,然后解读实例代码,看自己有哪些遗漏或者想不到的,他细节都是怎么实现的,算一个学习过程,为了直观,解读以注释形式给出。
这个方法的收获还是有很多的,反向传播的逐个计算可能是最难的,或者叫繁琐,我认为本质上和sigmoid或者affine层或者softmax_with_loss是一样的,如果有前边的基础,这个只是有空再练手,其实并不影响你理解,所以我跳过了,没在纸面上推。
下面是代码解读
- 前向传播的外层封装,卷积网络被改造成N*D的模式,最后恢复(好像用了channel_first模式):
def forward(self, x, train_flg=True):#封装:修改卷积模式到FC模式,
# BN应该是有一个channel一个平均值的模式?这里channel被平铺了,每个feature“像素点”一个平均值。
# 所以这可能不算最好的conv实例,权当是个FC罢,就是遇到Conv强行转FC的一个形式
self.input_shape = x.shape
if x.ndim != 2:
N, C, H, W = x.shape#用了channel_first
x = x.reshape(N, -1)
out = self.__forward(x, train_flg)
return out.reshape(*self.input_shape)#恢复原样
- 前向传播内层实现:
def __forward(self, x, train_flg):
if self.running_mean is None:#全局平均值的初始化,作者的参考代码全都是根据第一次前向传播确定形状的模式
N, D = x.shape
#这里也可以看出,是根据每个feature一个平均值,所以好像ConvNet不友好?但是BN层又不该改变维度,做了平均值最终也是要恢复的,注意,主要是平均值数值本身的不同,一个channel一个平均值理论上更平均一些罢了。
self.running_mean = np.zeros(D)
self.running_var = np.zeros(D)
if train_flg:#训练时(在纸上做公式的分解)
mu = x.mean(axis=0)#计算N个xi的平均值,N坍塌,D维持不变
xc = x - mu#x零中心化(N,D)
var = np.mean(xc ** 2, axis=0)#分子:计算标准差(简化了,因为xc=x-mu是零中心,所以xi-mu就成了xc,然后np.mean)
std = np.sqrt(var + 10e-7)#分母,标准差,防零
xn = xc / std#这是标准化后的输出,恢复分布的操作out= self.gamma*xn + self.beta提到了if外边,为了和else共享代码
self.batch_size = x.shape[0]
self.xc = xc#这些都被记录了下来,为了反向传播方便使用
self.xn = xn
self.std = std
# 这两个是记录全局平均,我也好奇全局平均怎么记录,总不能一直累加,最后测试时记住数量除一次?更不能每次简单对冲进去?因为batch不一样!
# 就算除以batch再去更新,那么权重也不太对,之前batch=10000被算成1份,现在batch=10也被算成一份,就冲淡了10000份?所以看到,他是用了momentum来做滑动平均的更新。
# 这些细节不去实现真的很不容易想到!!!!
self.running_mean = self.momentum * self.running_mean + (1 - self.momentum) * mu
self.running_var = self.momentum * self.running_var + (1 - self.momentum) * var
else:#这个简单:测试时候直接用全局平均值套公式计算一下就行了
xc = x - self.running_mean
xn = xc / ((np.sqrt(self.running_var + 10e-7)))
out = self.gamma * xn + self.beta#共享操作:恢复分布
return out
- 反向传播外层
def backward(self, dout):#同样的,封装了一个ConvNet维度处理的过程
if dout.ndim != 2:
N, C, H, W = dout.shape
dout = dout.reshape(N, -1)
dx = self.__backward(dout)
dx = dx.reshape(*self.input_shape)
return dx
- 反向传播内层
def __backward(self, dout):
#beta和gamma是最外层的两个操作,反向传播最简单,由xn*gamma+beta=out可知
dbeta = dout.sum(axis=0)#细节:x的坍缩,一个batch合并成一个值。
dgamma = np.sum(self.xn * dout, axis=0)#同上
#下面的不墨迹了,其实就是前向传播的过程,逐步反推回去
dxn = self.gamma * dout
dxc = dxn / self.std
dstd = -np.sum((dxn * self.xc) / (self.std * self.std), axis=0)
dvar = 0.5 * dstd / self.std
dxc += (2.0 / self.batch_size) * self.xc * dvar
dmu = np.sum(dxc, axis=0)
dx = dxc - dmu / self.batch_size#用来传递给前一层
self.dgamma = dgamma#本层需要的结果,保存,用于更新参数
self.dbeta = dbeta#本层需要的结果,保存,用于更新参数
return dx
- 最后简单带过init
def __init__(self, gamma, beta, momentum=0.9, running_mean=None, running_var=None):
self.gamma = gamma
self.beta = beta
self.momentum = momentum#用来做全局平均的衰减
self.input_shape = None # Conv层的情况下为4维,全连接层的情况下为2维
# 测试时使用的全局平均值和方差
self.running_mean = running_mean
self.running_var = running_var
# backward时使用的中间数据
self.batch_size = None
self.xc = None
self.std = None
self.dgamma = None
self.dbeta = None
-
这样,外边加上class BatchNormalization就完成了。
-
最后就是使用(需要在外部定义params传给BN类进行初始化,这个类似TF给出的一种半透明的使用方法,可以看到gamma默认1,beta默认0,对xn的分布不产生影响,之后具体什么值就要学习了)
# 初始化权重
self.__init_weight(weight_init_std)
# 生成层
activation_layer = {'sigmoid': Sigmoid, 'relu': Relu}
self.layers = OrderedDict()
for idx in range(1, self.hidden_layer_num+1):
self.layers['Affine' + str(idx)] = Affine(self.params['W' + str(idx)],
self.params['b' + str(idx)])
if self.use_batchnorm:
self.params['gamma' + str(idx)] = np.ones(hidden_size_list[idx-1])
self.params['beta' + str(idx)] = np.zeros(hidden_size_list[idx-1])
self.layers['BatchNorm' + str(idx)] = BatchNormalization(self.params['gamma' + str(idx)], self.params['beta' + str(idx)])
self.layers['Activation_function' + str(idx)] = activation_layer[activation]()
if self.use_dropout:
self.layers['Dropout' + str(idx)] = Dropout(dropout_ration)
idx = self.hidden_layer_num + 1
self.layers['Affine' + str(idx)] = Affine(self.params['W' + str(idx)], self.params['b' + str(idx)])
self.last_layer = SoftmaxWithLoss()
- 求梯度
def numerical_gradient(self, X, T):
loss_W = lambda W: self.loss(X, T, train_flg=True)
grads = {}
for idx in range(1, self.hidden_layer_num+2):
grads['W' + str(idx)] = numerical_gradient(loss_W, self.params['W' + str(idx)])
grads['b' + str(idx)] = numerical_gradient(loss_W, self.params['b' + str(idx)])
if self.use_batchnorm and idx != self.hidden_layer_num+1:
grads['gamma' + str(idx)] = numerical_gradient(loss_W, self.params['gamma' + str(idx)])
grads['beta' + str(idx)] = numerical_gradient(loss_W, self.params['beta' + str(idx)])
return grads
- 最后就是和其他一样的
w-=lr*grad
- 测试时注意一下参数要写成False:
def predict(self, x, train_flg=False):
小结:
BN层分两个阶段
公式的分解稍微繁琐
ConvNet的优化问题(私以为,这个代码不代表全部情况)














 3329
3329











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









