







云台是一种可以承载摄像头转动的调节装置,它由舵机来控制其在某一方向的转动,对于二维转动的云台,则需2个舵机来负责驱动。
由于舵机是通过PWM的占空比来调节转动的角度,为了简化PWM的处理,这里是用一个双通道的可调节型PWM功能模块来产生的输出信号。此外,该功能模块即可手动进行操控,也可通过串口来控制。为了便于以程序来控制该云台,这里是以串口的方式来控制该功能模块。
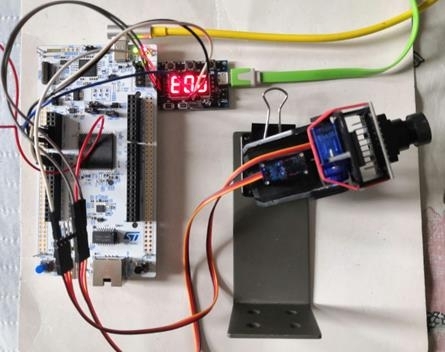
图1 整体构成
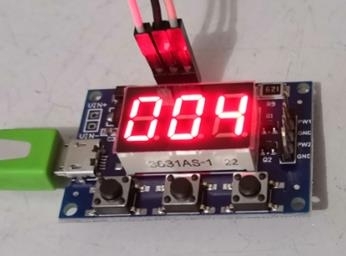
图2 PWM功能模块
PWM功能模块支持2种指令,一是频率设置指令,另一个是占空比设置指令。
以设置第一通道为50Hz频率为例,其指令为:S1F050T。其中,S1是选取第一通道进行设置,而F050则是设置频率为50Hz。
若将第二通道的占空比设置为3%,则指令为:S1D003T。其中,S2是选取第二通道进行设置,而D003则是设置占空比为3%。
为了进行测试,可通过串口助手类的工具来验证,其测试结果如图3至图5所示。

图3 方式指令
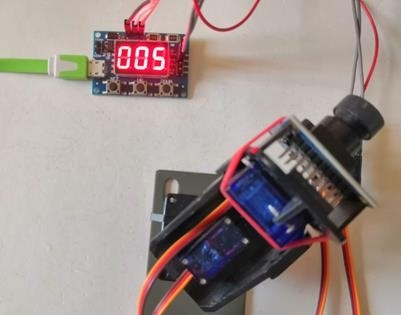
图4 控制效果1

图5 控制效果2
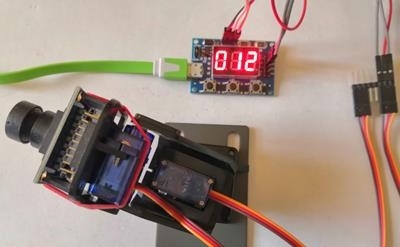
图6 控制效果3

图7 控制效果4
由图可知,数值越小则越向右转;数值越大则越向左转。
由图可知,数值越小则越向右转;数值越大则越向左转。
那么该如何用开发板来控制PWM调节功能模块呢?
这里是使用USART2来进行串口通讯,其引脚位置如图8所示。
其中: PD5为发送引脚,PD6为接收引脚。
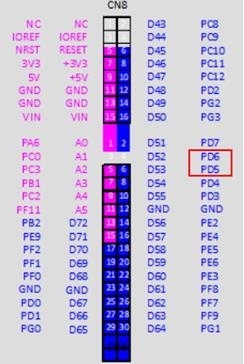
图8 串口引脚
通过USB转TTL模块的处理,可将串口通信转为 USB通讯。
在直接进行PWM调节模块控制时,则可以直接将PC12接到调节模块的接收端,而将PD2接到调节模块的发送端。
控制指令是放在数组中,在发送时再实时地对指令参数进行调整。
uint8_t MLF[7]={'S','1','F','0','5','0','T'};
uint8_t MLP[7]={'S','1','D','0','0','4','T'};
发送指令的程序代码为:
HAL_UART_Transmit(&huart2,(uint8_t *)MF, 7, 5000);
实现按键中断处理的函数为:
复制
void HAL_GPIO_EXTI_Rising_Callback(uint16_t GPIO_Pin)
{
if (GPIO_Pin == BUTTON_USER_PIN)
{
UserButtonStatus = 1;
}
}
实现单维度云台控制的主程序为:
复制
int main(void)
{
uint8_t MLF[7]={'S','1','F','0','5','0','T'};
uint8_t MLP[7]={'S','1','D','0','0','3','T'};
uint8_t n=3;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART2_UART_Init();
MX_ICACHE_Init();
BSP_LED_Init(LED1);
BSP_LED_Init(LED3);
if (HAL_UART_Transmit(&huart2, (uint8_t *)MLF, 7, 5000) != HAL_OK)
{
Error_Handler();
}
while (1)
{
BSP_PB_Init(BUTTON_USER, BUTTON_MODE_EXTI);
while (UserButtonStatus == 0)
{
BSP_LED_Toggle(LED1);
HAL_Delay(100);
}
BSP_LED_Off(LED1);
MLP[4]= n/10+'0';
MLP[5]= n%10+'0';
n=(n+1)%13;
if(n==0) n=3;
UserButtonStatus = 0;
if (HAL_UART_Transmit(&huart2, (uint8_t *)MLP, 7, 5000) != HAL_OK)
{
Error_Handler();
}
HAL_Delay(100);
}
}
经程序的编译及下载,其测试结果如图9所示,即每按下一次蓝色用户键,则占空比的值增大一次,直到最大值时,再返回到最小值重新开始。
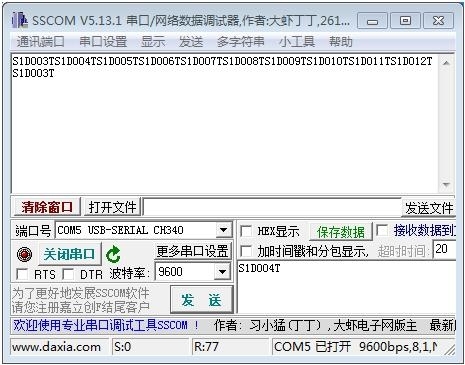
图9 测试发送指令
为了进行二维的云台控制,需将单键的中断式相应处理修改为双键的查询式处理,令每个按键各负责一个维度的调节控制。
---------------------
作者:jinglixixi
链接:https://bbs.21ic.com/icview-3318308-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。
---------------------
作者:jinglixixi
链接:https://bbs.21ic.com/icview-3318308-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。















 5078
5078











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









