







测试下开发板的CAN收发功能。
一、硬件部分
1.1、CAN收发器电路

1.2、CAN接口
CAN接口连接到PE4和PE5端口
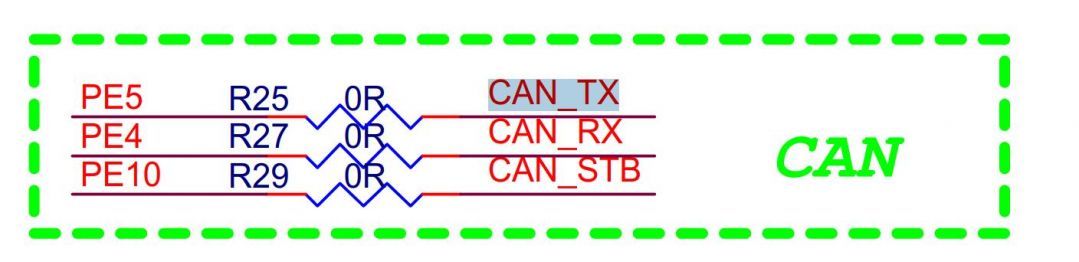
1.3、芯片端口映射
PE4和PE5映射到CAN0

二、程序部分
2.1、can.c
复制
#include "ac7840x.h"
#include "gpio_drv.h"
#include "can_drv.h"
#include "can/can.h"
#include "osif.h"
#include "clock_config.h"
/* ============================================ Define ============================================ */
#define CAN_SOURCE_CLOCK (60UL) /* 时钟源选择60M */
#define CAN_MSG_HANDLE_DIRECT (1UL) /* 是否处理消息, 1 是, 0 否 */
#define CAN_TIME_STAMP_ENABLE (0UL) /* 使能/失能CAN时间戳, 1 使能, 0 失能 */
/* =========================================== Typedef ============================================ */
typedef struct
{
uint32_t recvCount; /* 接收消息计数 */
uint32_t sendCount; /* 发送消息计数*/
} can_cur_node_t;
/* ========================================== Variables =========================================== */
/*
* 波特率和采样点计算公式:
* tSeg1 = (S_SEG_1 + 2); tSeg2 = (S_SEG_2 + 1).
* BandRate = (SRC_CLK / (S_PRESC + 1) / ((S_SEG_1 + 2) + (S_SEG_2 + 1))), SRC_CLK 为CAN模块时钟源
* SamplePoint = (tSeg1 / (tSeg1 + tSeg2)).
*/
#if (CAN_SOURCE_CLOCK == 80UL) /*时钟源为80M*/
static const can_time_segment_t s_canBitrate[CAN_BITRATE_NUM] =
{
{0x1C, 0x09, 0x09, 0x01}, /* 1M, 75% */
{0x26, 0x09, 0x09, 0x01}, /* 800K, 80% */
{0x1C, 0x09, 0x09, 0x03}, /* 500K, 75% */
{0x1C, 0x09, 0x09, 0x07}, /* 250K, 75% */
{0x1C, 0x09, 0x09, 0x0F}, /* 125K, 75% */
{0x1C, 0x09, 0x09, 0x13}, /* 100K, 75% */
{0x1C, 0x09, 0x09, 0x27}, /* 50K, 75% */
};
#elif (CAN_SOURCE_CLOCK == 60UL) /*时钟源为60M*/
static const can_time_segment_t s_canBitrate[CAN_BITRATE_NUM] =
{
{0x0D, 0x04, 0x04, 0x02}, /* 1M, 75% */
{0x12, 0x04, 0x04, 0x02}, /* 800K, 80% */
{0x1C, 0x09, 0x09, 0x02}, /* 500K, 75% */
{0x1C, 0x09, 0x09, 0x05}, /* 250K, 75% */
{0x1C, 0x09, 0x09, 0x0B}, /* 125K, 75% */
{0x1C, 0x09, 0x09, 0x0E}, /* 100K, 75% */
{0x1C, 0x09, 0x09, 0x1D}, /* 50K, 75% */
};
#elif (CAN_SOURCE_CLOCK == 48UL) /* 时钟源为48M*/
static const can_time_segment_t s_canBitrate[CAN_BITRATE_NUM] =
{
{0x22, 0x0B, 0x0B, 0x00}, /* 1M, 75% */
{0x16, 0x05, 0x05, 0x01}, /* 800K, 80% */
{0x22, 0x0B, 0x0B, 0x01}, /* 500K, 75%*/
{0x22, 0x0B, 0x0B, 0x03}, /* 250K, 75% */
{0x22, 0x0B, 0x0B, 0x07}, /* 125K, 75% */
{0x22, 0x0B, 0x0B, 0x09}, /* 100K, 75% */
{0x22, 0x0B, 0x0B, 0x13}, /* 50K, 75% */
};
#elif (CAN_SOURCE_CLOCK == 24UL) /* 时钟源为24M*/
static const can_time_segment_t s_canBitrate[CAN_BITRATE_NUM] =
{
{0x10, 0x05, 0x05, 0x00}, /* 1M, 75% */
{0x16, 0x05, 0x05, 0x00}, /* 800K, 80% */
{0x10, 0x05, 0x05, 0x01}, /* 500K, 75% */
{0x10, 0x05, 0x05, 0x03}, /* 250K, 75% */
{0x10, 0x05, 0x05, 0x07}, /* 125K, 75% */
{0x10, 0x05, 0x05, 0x09}, /* 100K, 75% */
{0x10, 0x05, 0x05, 0x13}, /* 50K, 75% */
};
#elif (CAN_SOURCE_CLOCK == 8UL) /*时钟源为8M*/
static const can_time_segment_t s_canBitrate[CAN_BITRATE_NUM] =
{
{0x04, 0x01, 0x01, 0x00}, /* 1M,75% */
{0x06, 0x01, 0x01, 0x00}, /* 800K, 80% */
{0x0A, 0x03, 0x03, 0x00}, /* 500K,75% */
{0x0A, 0x03, 0x03, 0x01}, /* 250K,75% */
{0x0A, 0x03, 0x03, 0x03}, /* 125K,75% */
{0x0D, 0x04, 0x03, 0x03}, /* 100K,75% */
{0x0D, 0x04, 0x03, 0x07}, /* 50K,75% */
};
#endif
static const can_filter_config_t s_canFilterList[16] = /* 过滤器配置*/
{
{0x00000001, 0x00000000, CAN_MSG_ID_BOTH}, /* 只接收ID 0x0000_0001和0x001的数据 */
{0x00000002, 0x00000000, CAN_MSG_ID_STD}, /* 只接收ID 0x002的标准帧数据 */
{0x00000013, 0x00000000, CAN_MSG_ID_EXT}, /* 只接收ID 0x0000_0013的扩展帧数据 */
{0x00000124, 0x00000000, CAN_MSG_ID_BOTH}, /* 只接收ID 0x0000_0124和0x124的数据 */
{0x00000050, 0x1FFFFF0F, CAN_MSG_ID_BOTH}, /* 可接收ID 0xXXXX_XX5X 或 0xX5X的数据,X为任意值 */
{0x00000060, 0x1FFFFF0F, CAN_MSG_ID_BOTH}, /* 可接收ID 0xXXXX_XX6X 或 0xX6X的数据,X为任意值 */
{0x00000007, 0x1FFFFFF0, CAN_MSG_ID_BOTH}, /* 可接收ID 0xXXXX_XXX7 或 0xXX7的数据,X为任意值 */
{0x00000008, 0x1FFFFFF0, CAN_MSG_ID_BOTH}, /* 可接收ID 0xXXXX_XXX8 或 0xXX8的数据,X为任意值 */
{0x00000009, 0x1FFFFFF0, CAN_MSG_ID_STD}, /* 可接收ID 0xXX9的标准帧数据,X为任意值 */
{0x0000000a, 0x1FFFFFF0, CAN_MSG_ID_EXT}, /* 可接收ID 0xXXXX_XXXa的扩展帧数据,X为任意值 */
{0x00000700, 0x1FFFF0FF, CAN_MSG_ID_BOTH}, /* 可接收ID 0xXXXX_X7XX 或 0x7XX的数据,X为任意值 */
{0x0000c000, 0x1FFF0FFF, CAN_MSG_ID_EXT}, /* 可接收ID 0xXXXX_CXXX 的扩展帧数据,X为任意值 */
{0x000d0000, 0x1FF0FFFF, CAN_MSG_ID_EXT}, /* 可接收ID 0xXXXX_DXXX 的扩展帧数据,X为任意值 */
{0x00e00000, 0x1F0FFFFF, CAN_MSG_ID_EXT}, /* 可接收ID 0xXXEX_XXXX 的扩展帧数据,X为任意值 */
{0x0f000000, 0x10FFFFFF, CAN_MSG_ID_EXT}, /* 可接收ID 0xXXXX_XXXX 的扩展帧数据,X为任意值 */
{0x10000000, 0x0FFFFFFF, CAN_MSG_ID_EXT}, /* 可接收ID 0xXXXX_XXXX 的扩展帧数据,X为任意值 */
};
static can_cur_node_t s_canCurNode[CAN_INSTANCE_MAX] = {0}; /* 接收信息*/
/*!
* [url=home.php?mod=space&uid=247401]@brief[/url] GPIO 初始化
*
* @param[in] instance: CAN 模块通道
* [url=home.php?mod=space&uid=266161]@return[/url] none
*/
void CAN_InitGPIO(uint8_t instance)
{
if (0U == instance)
{
GPIO_DRV_SetMuxModeSel(PORTE, 4U, PORT_MUX_ALT5); /* CAN0_RX */
GPIO_DRV_SetMuxModeSel(PORTE, 5U, PORT_MUX_ALT5); /* CAN0_TX */
GPIO_DRV_SetMuxModeSel(PORTE, 10U, PORT_MUX_ALT5); /* 配置收发器standby功能*/
}
else if (1U == instance)
{
GPIO_DRV_SetMuxModeSel(PORTC, 6U, PORT_MUX_ALT3); /* CAN1_RX */
GPIO_DRV_SetMuxModeSel(PORTC, 7U, PORT_MUX_ALT3); /* CAN1_TX */
GPIO_DRV_SetMuxModeSel(PORTE, 6U, PORT_MUX_ALT5); /* 配置收发器standby功能*/
}
else if (2U == instance)
{
GPIO_DRV_SetMuxModeSel(PORTC, 16U, PORT_MUX_ALT3); /* CAN2_RX */
GPIO_DRV_SetMuxModeSel(PORTC, 17U, PORT_MUX_ALT3); /* CAN2_TX */
GPIO_DRV_SetMuxModeSel(PORTC, 15U, PORT_MUX_ALT5); /* 配置收发器standby功能 */
}
else if (3U == instance)
{
GPIO_DRV_SetMuxModeSel(PORTC, 12U, PORT_MUX_ALT5); /* CAN3_RX */
GPIO_DRV_SetMuxModeSel(PORTC, 13U, PORT_MUX_ALT5); /* CAN3_TX */
GPIO_DRV_SetMuxModeSel(PORTC, 11U, PORT_MUX_ALT5); /* 配置收发器standby功能 */
}
}
/*!
* @brief CAN_GetNormalBitrate 获取波特率
*
* @param[in] index: 波特率索引
* @return 波特率配置
*/
static can_time_segment_t CAN_GetNormalBitrate(can_bitrate_t index)
{
can_time_segment_t bitrate = {0};
if (index < CAN_BITRATE_NUM)
{
bitrate = s_canBitrate[index];
}
return bitrate;
}
/*!
* @brief CAN_HandleMsg 接收数据处理
*
* @param[in] instance: CAN 模块通道
* @param[in] msgInfo: 接收数据
* @return none
*/
static void CAN_HandleMsg(uint8_t instance, const can_msg_info_t *msgInfo)
{
uint8_t i = 0;
s_canCurNode[instance].recvCount++; /* 节点信息更新 */
#if CAN_MSG_HANDLE_DIRECT /* 处理数据*/
if (msgInfo->IDE)
{
printf("CAN[%d] RecvCount:%06d ID:%08x DLC:%d", instance, s_canCurNode[instance].recvCount, msgInfo->ID, msgInfo->DLC);
}
else
{
printf("CAN[%d] RecvCount:%06d ID:%03x DLC:%d", instance, s_canCurNode[instance].recvCount, msgInfo->ID, msgInfo->DLC);
}
if ((0 == msgInfo->RTR) && msgInfo->DLC)
{
printf("\r\tData: ");
for (i = 0; (i < msgInfo->DLC) && (i < 8); i++)
{
printf(" %02x", msgInfo->DATA[i]);
}
}
printf("\r\n");
#endif
}
/*!
* @brief CAN_EventCallback 中断回调函数, 可通过CAN_IRQHandler了解参数具体含义
*
* @param[in] instance: CAN 模块通道
* @param[in] event: 中断事件
* @param[in] koer: 错误类型
* @return 0: none
*/
void CAN_EventCallback(uint8_t instance, uint32_t event, uint32_t koer)
{
can_msg_info_t recvMsg = {0};
uint8_t recvData[8] = {0};
if (event & (uint32_t)CAN_EVENT_BUS_ERROR) /* 发生错误后,打印错误消息,仅用于调试 */
{
printf("CAN[%d]e: EVEN: %x KOER: %x\r\n", instance, event, koer);
}
if (event & (uint32_t)CAN_EVENT_RECEIVE_DONE) /* 接收数据*/
{
while (CAN_DRV_GetRbufStatus(instance))
{
recvMsg.DATA = recvData; /* 为接收数据索引中的数据域分配空间, 如果未给接收数据索引的数据域分配空间,直操作会触发Haltfault */
if (!CAN_DRV_Receive(instance, &recvMsg))
{
CAN_HandleMsg(instance, &recvMsg);
}
}
}
}
void init_can(void)
{
uint8_t instance = 0U;
can_user_config_t canCfg = {0};
can_bitrate_t bitrateIndex = CAN_BITRATE_500K; /* 低速波特率设置 */
can_transmit_buff_t type = CAN_TRANSMIT_SECONDARY; /* 发送缓存设置 */
canCfg.filterNum = 0U; /* 过滤器数量 */
canCfg.canMode = CAN_NORMAL_MODE; /* 正常模式 */
canCfg.interruptEn = true; /* 使能中断*/
canCfg.tsMode = CAN_TSMODE_FIFO; /* 选择FIFO模式*/
canCfg.tsAmount = CAN_TRANSMIT_SEC_ALL; /* TSALL*/
canCfg.tpss = false; /* 失能PTB单次发送 */
canCfg.tsss = false; /* 失能STB单次发送 */
canCfg.rom = CAN_ROM_OVER_WRITE; /* 缓冲区溢出后,新数据会覆盖旧数据*/
canCfg.errorWarningLimit = 0x0BU; /* 错误警告限制,当 TECNT|RECTN 超过这个限制,会触发EIF错误中断 */
#if CAN_TIME_STAMP_ENABLE
canCfg.timeStampEn = true; /* 时间戳使能 */
canCfg.timeStampClkSrc = CAN_TIME_STAMP_CLK_SRC_EXT; /* 时间戳时钟源选择 */
canCfg.timeStampClkDiv = CAN_TIME_STAMP_CLK_DIV_8; /* 时间戳时钟源分频 */
canCfg.timeStampPos = CAN_TIME_STAMP_SOF; /* 时间区采样位置选择 */
#endif
canCfg.dmaRecvEn = false; /* 不使用DMA */
canCfg.memEccEn = false; /* 失能ECC */
canCfg.wakeupIntEn = false; /* 失能唤醒功能 */
canCfg.busOffRecDisable = false; /* 失能自动总线关闭恢复, busoff产生后, 会遵循ISO 11898-规范 */
canCfg.interruptMask = CAN_IRQ_ALL_ENABLE_MSK; /* 使能所有中断*/
canCfg.bitrate = CAN_GetNormalBitrate(bitrateIndex); /* 低速波特率配置*/
canCfg.filterList = (can_filter_config_t *)s_canFilterList; /* 过滤器配置*/
canCfg.callback = (can_callback_t)CAN_EventCallback;
CAN_InitGPIO(instance); /* CAN模块IO口初始化 */
CAN_DRV_Init(instance, &canCfg); /* CAN模块初始化 */
}
void can_senddat(uint8_t *dat)
{
int32_t ret = 1;
static can_msg_info_t s_sendMsg = {0};
static uint8_t sendData[8] = {0};
if (!CAN_DRV_IsTransmitBusy(0, CAN_TRANSMIT_SECONDARY))
{
s_sendMsg.ID = 0x220; /* CAN ID*/
s_sendMsg.IDE = 0; /* 标准帧*/
s_sendMsg.RTR = 0; /* 非远程帧*/
s_sendMsg.DLC = 8; /* 数据长度*/
s_sendMsg.DATA = sendData; /* 分配空间*/
s_sendMsg.DATA[0] = dat[0]; /* 填充数据*/
s_sendMsg.DATA[1] = dat[1];
s_sendMsg.DATA[2] = dat[2];
s_sendMsg.DATA[3] = dat[3];
s_sendMsg.DATA[4] = dat[4];
s_sendMsg.DATA[5] = dat[5];
s_sendMsg.DATA[6] = dat[6];
s_sendMsg.DATA[7] = dat[7];
if (STATUS_SUCCESS == CAN_DRV_Send(0, &s_sendMsg, CAN_TRANSMIT_SECONDARY))
{
s_canCurNode[0].sendCount++; /* 节点信息更新 */
ret = 0;
}
}
return ret;
}
2.2、main.c
复制
#include "ac7840x.h"
#include "clock_config.h"
#include "debugout_ac7840x.h"
#include "osif.h"
#include "led/led.h"
#include "key/key.h"
#include "adc/adc.h"
#include "spi/spi.h"
#include "ch376s.h"
#include "can/can.h"
uint8_t can_txbuf[8];
void SystemClock_Config(void)
{
CKGEN_SYS_Init(g_clockManConfigsArr, CLOCK_MANAGER_CONFIG_CNT,
g_clockManCallbacksArr, CLOCK_MANAGER_CALLBACK_CNT);
CKGEN_DRV_UpdateConfiguration(0, CLOCK_MANAGER_POLICY_AGREEMENT);
}
int main(void)
{
uint8_t i=0;
SystemClock_Config();
init_led();
init_key();
init_adc();
InitDebug();
init_can();
while (1)
{
i++;
can_txbuf[0]=i;
can_senddat(can_txbuf);
led3_on();
OSIF_TimeDelay(100);
led3_off();
OSIF_TimeDelay(100);
//ADC_TriggerTest();
}
}
三、运行结果
3.1、CAN接收测试
打开CAN调试卡,收到开发板发送的数据

3.2、CAN接收测试
串口打印CAN接收到的数据

。
---------------------
作者:tlled
链接:https://bbs.21ic.com/icview-3350900-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。














 101
101











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









