







 本文记录了使用STM32单片机驱动ATK-Lora-01模块的学习过程,包括模块配置、调试方法以及代码解析,强调了AUX引脚的重要功能和通信模式。
本文记录了使用STM32单片机驱动ATK-Lora-01模块的学习过程,包括模块配置、调试方法以及代码解析,强调了AUX引脚的重要功能和通信模式。
前言
最近手里有两块白嫖的ATK-Lora-01模块放着也是放着,大概长这样,决定拿出来研究一下,因为网上很少有相关的内容资料可供参考,因此爬了不少资料和代码,在这里记录一下学习过程。

ATK-Lora-01模块的配置和调试
这个模块到手之后,为了调试方便采用了正点原子的上位机软件。资料和软件均下载于正点原子的资料下载中心。
链接:LORA模块ATK-LORA-01 — 正点原子资料下载中心 1.0.0 文档 (openedv.com)
首先要确保模块的功能正常,因为懒得写代码,我直接用了一块USB转TTL的转接器把这个模块接在了笔记本上。接在开发板上也是可以的,但是需要把设置的串口数据拷贝到开发板和电脑通信的串口上(注意波特率),这里不再详细说了。直接看接线
| USB转TTL | ATK-Lora-01 |
| 5V/3.3V均可 | VCC |
| GND | GND |
| TXD | RX |
| RXD | TX |
| 无需接线 | AUX |
| IO | MD0 |
这里需要注意的是这个模块有三种功能分别是配置功能,固件升级功能和通信功能,主要是依赖AUX和MD0引脚的高低电平配合来实现的。在进行固件升级的时候需要在模块上电前将AUX和MD0保持1S的高电平会进入固件升级模式,这里不多赘述。因为USB转TTL的转接头没有IO的原因,我将MD0接到了开发板上随便一个高电平的引脚(注意保持共地!即转接头的GND要连接开发板的GND)。
| 配置功能 | AUX=0 MD0=1 |
| 固件升级功能 | AUX=1 MD0=1 |
| 通信功能 | AUX=0 MD0=0 |
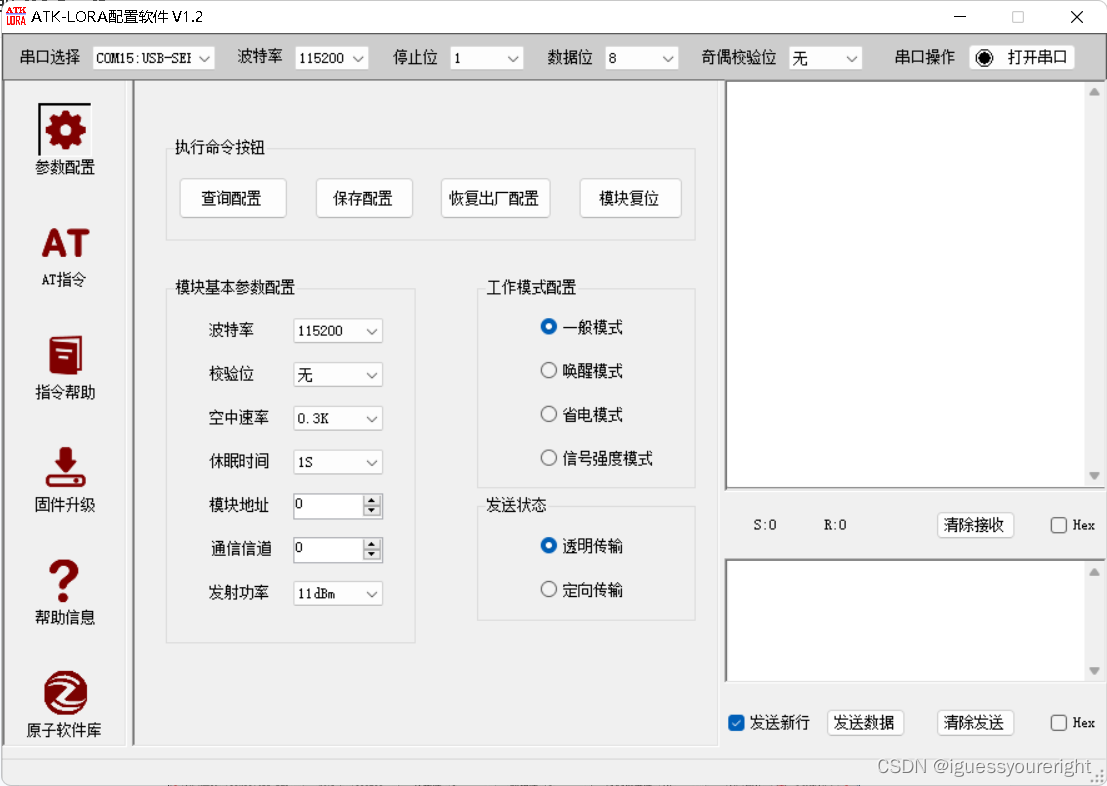
在接线完毕之后,我们只需要保持串口的设置为如图所示的样子,即模块默认的串口波特率然后点击查询配置
![]()
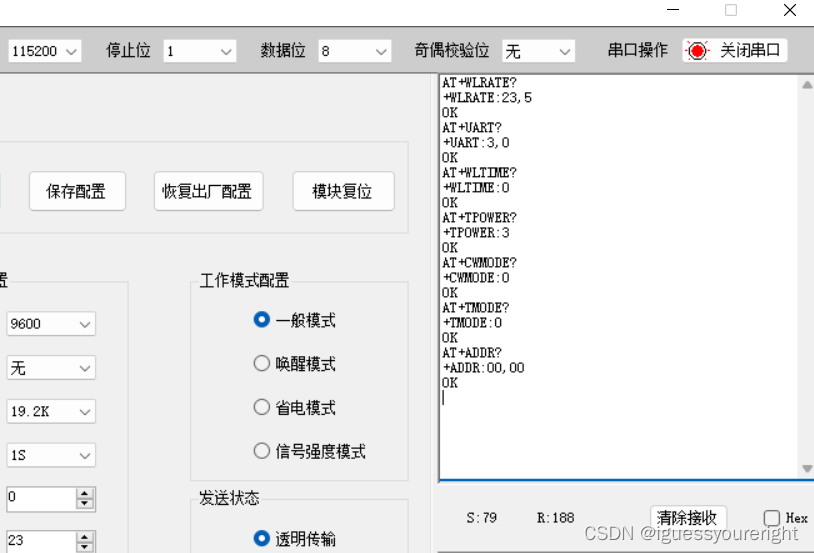
如果看到接收区出现了下图所示的内容,则证明模块是正常工作的,然后我们配置基本上就完成了。
快速了解ATK-Lora-01
- 模块的传输方式
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 933
933

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









