







IIC总线驱动+IIC设备驱动(驱动分割分离分层思想)
我们不需要写适配器,只需要写设备驱动
I2C 是很常用的一个串行通信接口,用于连接各种外设、传感器等器件,在裸机篇已经对
I.MX6U
的
I2C
接口做了详细的讲解。本章我们来学习一下如何在
Linux
下开发
I2C
接口器件驱动,重点是学习 Linux
下的
I2C
驱动框架,按照指定的框架去编写
I2C
设备驱动。

I2C 总线驱动重点是 I2C 适配器(也就是 SOC 的 I2C 接口控制器)驱动,这里要用到 两个重要的数据结构:i2c_adapter 和 i2c_algorithm,Linux 内核将 SOC 的 I2C 适配器(控制器) 抽象成i2c_adapter,i2c_adapter 结构体定义在 include/linux/i2c.h 文件中。

=========================================================================
I2C
设备驱动重点关注两个数据结构:
i2c_client 和 i2c_driver
,根据总线、设备和驱动模型,
I2C
总线上一小节已经讲了。还剩下设备和驱动,
i2c_client
就是描述设备信息的,
i2c_driver 描述驱动内容,类似于
platform_driver
。


1、对于我们 I2C 设备驱动编写人来说,重点工作就是构建 i2c_driver,构建完成以后需要向 Linux 内核注册这个 i2c_driver。i2c_driver 注册函数为 int i2c_register_driver
另外
i2c_add_driver
也常常用于注册
i2c_driver
,
i2c_add_driver
是一个宏,定义如下:
示例代码 61.1.2.3 i2c_add_driver 宏587 #define i2c_add_driver ( driver ) \588 i2c_register_driver ( THIS_MODULE , driver )
i2c_add_driver
就是对
i2c_register_driver
做了一个简单的封装,只有一个参数,就是要注册
的
i2c_driver
。
2、注销 I2C 设备驱动的时候需要将前面注册的 i2c_driver 从 Linux 内核中注销掉,需要用到i2c_del_driver 函数,此函数原型如下:
void i2c_del_driver(struct i2c_driver *driver)函数参数和返回值含义如下:driver :要注销的 i2c_driver 。返回值: 无
=========================================================================

在IIC1 上 接了 AP3216C
修改设备树,我们不能在imx6ull.dtsi中修改,只能在imx6ull-alientek-emmc.dts中修改,
从下列代码中可以看出i2c1下添加了ap3216。i2c2下添加了codec等一系列设备

&i2c1 {
clock-frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c1>;
status = "okay";
ap3216c@1e {
compatible = "alientek,ap3216c";
reg = <0x1e>;
};
};
&i2c2 {
clock_frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c2>;
status = "okay";
codec: wm8960@1a {
compatible = "wlf,wm8960";
reg = <0x1a>;
clocks = <&clks IMX6UL_CLK_SAI2>;
clock-names = "mclk";
wlf,shared-lrclk;
};
ov5640: ov5640@3c {
compatible = "ovti,ov5640";
reg = <0x3c>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_csi1>;
clocks = <&clks IMX6UL_CLK_CSI>;
clock-names = "csi_mclk";
pwn-gpios = <&gpio_spi 6 1>;
rst-gpios = <&gpio_spi 5 0>;
csi_id = <0>;
mclk = <24000000>;
mclk_source = <0>;
status = "disabled";
port {
ov5640_ep: endpoint {
remote-endpoint = <&csi1_ep>;
};
};
};
/* zuozhongkai FT5406/FT5426 */
ft5426: ft5426@38 {
compatible = "edt,edt-ft5426","edt,edt-ft5406";
reg = <0x38>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_tsc
&pinctrl_tsc_reset >;
interrupt-parent = <&gpio1>;
interrupts = <9 0>;
reset-gpios = <&gpio5 9 GPIO_ACTIVE_LOW>;
interrupt-gpios = <&gpio1 9 GPIO_ACTIVE_LOW>;
status = "okay";
};
gt9147:gt9147@14 {
compatible = "goodix,gt9147", "goodix,gt9xx";
reg = <0x14>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_tsc
&pinctrl_tsc_reset >;
interrupt-parent = <&gpio1>;
interrupts = <9 0>;
reset-gpios = <&gpio5 9 GPIO_ACTIVE_LOW>;
interrupt-gpios = <&gpio1 9 GPIO_ACTIVE_LOW>;
status = "disable"; /* 如果需要改为okay */
};
/* zuozhongkai sill902x,如果需要HDMI就将status改为okay即可 */
/*
sii902x: sii902x@39 {
compatible = "SiI,sii902x";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_sii902x>;
interrupt-parent = <&gpio1>;
interrupts = <9 IRQ_TYPE_EDGE_FALLING>;
irq-gpios = <&gpio1 9 GPIO_ACTIVE_LOW>;
mode_str = "1280x720M@60";
bits-per-pixel = <16>;
resets = <&sii902x_reset>;
reg = <0x39>;
status = "disable";
};*/
};

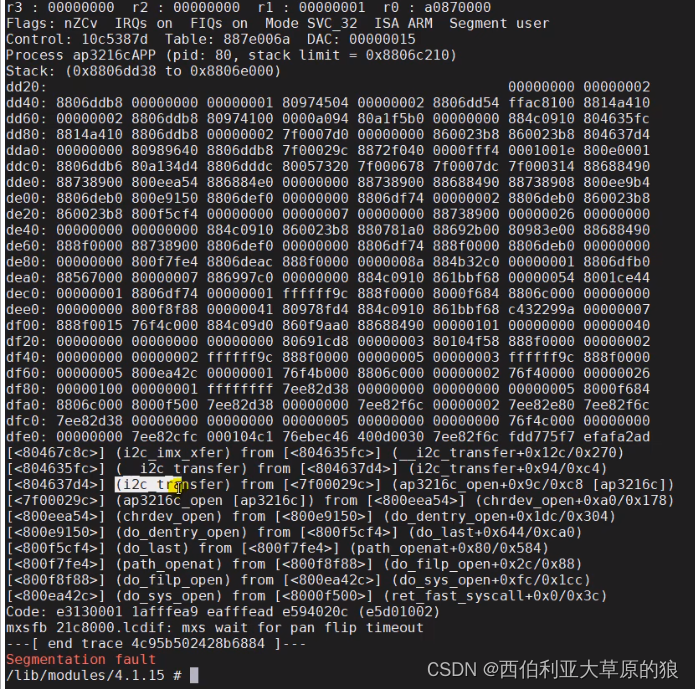
查问题,栈回溯,可以看到进入了ap3216c_open,然后在i2c_transfer中出问题了
#ifndef AP3216C_H
#define AP3216C_H
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : ap3216creg.h
作者 : 左忠凯
版本 : V1.0
描述 : AP3216C寄存器地址描述头文件
其他 : 无
论坛 : www.openedv.com
日志 : 初版V1.0 2019/9/2 左忠凯创建
***************************************************************/
// 这个头文件用来存放ap3216c的寄存器信息
#define AP3216C_ADDR 0X1E /* AP3216C器件地址 */
/* AP3316C寄存器 */
#define AP3216C_SYSTEMCONG 0x00 /* 配置寄存器 */
#define AP3216C_INTSTATUS 0X01 /* 中断状态寄存器 */
#define AP3216C_INTCLEAR 0X02 /* 中断清除寄存器 */
#define AP3216C_IRDATALOW 0x0A /* IR数据低字节 */
#define AP3216C_IRDATAHIGH 0x0B /* IR数据高字节 */
#define AP3216C_ALSDATALOW 0x0C /* ALS数据低字节 */
#define AP3216C_ALSDATAHIGH 0X0D /* ALS数据高字节 */
#define AP3216C_PSDATALOW 0X0E /* PS数据低字节 */
#define AP3216C_PSDATAHIGH 0X0F /* PS数据高字节 */
#endif
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/i2c.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include "ap3216creg.h"
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : ap3216c.c
作者 : 左忠凯
版本 : V1.0
描述 : AP3216C驱动程序
其他 : 无
论坛 : www.openedv.com
日志 : 初版V1.0 2019/9/2 左忠凯创建
***************************************************************/
#define AP3216C_CNT 1
#define AP3216C_NAME "ap3216c"
struct ap3216c_dev {
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
struct device_node *nd; /* 设备节点 */
int major; /* 主设备号 */
void *private_data; /* 私有数据 */
unsigned short ir, als, ps; /* 三个光传感器数据 注意这里数据类型short*/
};
static struct ap3216c_dev ap3216cdev;
/*
* @description : 从ap3216c读取多个寄存器数据
* @param - dev: ap3216c设备
* @param - reg: 要读取的寄存器首地址
* @param - val: 读取到的数据
* @param - len: 要读取的数据长度
* @return : 操作结果
*
* 读取AP3216C的N个寄存器值
*/
//读 read 写 write函数是IIC的难点和重点//
static int ap3216c_read_regs(struct ap3216c_dev *dev, u8 reg, void *val, int len)
{
int ret;
struct i2c_msg msg[2];
// 从私有变量中获取一系列数据
struct i2c_client *client = (struct i2c_client *)dev->private_data;
/* msg[0]为发送要读取的首地址 */
msg[0].addr = client->addr; /* 从机地址 也就是ap3216c地址 */
msg[0].flags = 0; /* 标记为要发送的数据 */
msg[0].buf = ® /* 要发送的数据马也就是寄存器地址 */
msg[0].len = 1; /* 要发送的寄存器地址长度为1*/
/* msg[1]读取数据 */
msg[1].addr = client->addr; /* 从机地址 也就是ap3216c地址 */
msg[1].flags = I2C_M_RD; /* 标记为读数据*/
msg[1].buf = val; /* 读取数据缓冲区,接收到的从机发送的数据 */
msg[1].len = len; /* 要读取的寄存器长度*/
// i2c_transfer 即能向寄存器里面写数据,也能向寄存器里面读
// 从哪读要告诉他
ret = i2c_transfer(client->adapter, msg, 2);
if(ret == 2) {
ret = 0;
} else {
printk("i2c rd failed=%d reg=%06x len=%d\n",ret, reg, len);
ret = -EREMOTEIO;
}
return ret;
}
/*
* @description : 向ap3216c多个寄存器写入数据
* @param - dev: ap3216c设备
* @param - reg: 要写入的寄存器首地址
* @param - val: 要写入的数据缓冲区
* @param - len: 要写入的数据长度
* @return : 操作结果
*
* 向AP3216C写N个寄存器的数据
*/
static s32 ap3216c_write_regs(struct ap3216c_dev *dev, u8 reg, u8 *buf, u8 len)
{
u8 b[256];
struct i2c_msg msg;
struct i2c_client *client = (struct i2c_client *)dev->private_data;
b[0] = reg; /* 寄存器首地址 */
memcpy(&b[1],buf,len); /* 将要写入的数据 拷贝 到数组b里面 */
msg.addr = client->addr; /* 从机地址 也就是ap3216c地址 */
msg.flags = 0; /* 表示为要发送的数据 */
msg.buf = b; /* 要发送的数据,寄存器地址 + 实际数据 */
msg.len = len + 1; /* 要写入的数据长度 寄存器地址长度 + 实际的数据长度*/
return i2c_transfer(client->adapter, &msg, 1);
}
/*
* @description : 读取ap3216c指定寄存器值,读取一个寄存器
* @param - dev: ap3216c设备
* @param - reg: 要读取的寄存器
* @return : 读取到的寄存器值
*
* 读取AP3216C的 1 个寄存器值
*/
static unsigned char ap3216c_read_reg(struct ap3216c_dev *dev, u8 reg)
{
u8 data = 0;
// 直接调用写的函数,长度为 1
ap3216c_read_regs(dev, reg, &data, 1);
return data;
#if 0
struct i2c_client *client = (struct i2c_client *)dev->private_data;
return i2c_smbus_read_byte_data(client, reg);
#endif
}
/*
* @description : 向ap3216c指定寄存器写入指定的值,写一个寄存器
* @param - dev: ap3216c设备
* @param - reg: 要写的寄存器
* @param - data: 要写入的值
* @return : 无
*/
static void ap3216c_write_reg(struct ap3216c_dev *dev, u8 reg, u8 data)
{
u8 buf = 0;
buf = data;
ap3216c_write_regs(dev, reg, &buf, 1);
}
/*
* @description : 读取AP3216C的数据,读取原始数据,包括ALS,PS和IR, 注意!
* : 如果同时打开ALS,IR+PS的话两次数据读取的时间间隔要大于112.5ms
* @param - ir : ir数据
* @param - ps : ps数据
* @param - ps : als数据
* @return : 无。
*/
void ap3216c_readdata(struct ap3216c_dev *dev)
{
unsigned char i =0;
unsigned char buf[6];
/* 循环读取所有传感器数据 */
for(i = 0; i < 6; i++)
{
buf[i] = ap3216c_read_reg(dev, AP3216C_IRDATALOW + i);
}
if(buf[0] & 0X80) /* IR_OF位为1,则数据无效 */
dev->ir = 0;
//从buf[0] 数组里面取 位
else /* 读取IR传感器的数据 */
dev->ir = ((unsigned short)buf[1] << 2) | (buf[0] & 0X03);
dev->als = ((unsigned short)buf[3] << 8) | buf[2]; /* 读取ALS传感器的数据 */
if(buf[4] & 0x40) /* IR_OF位为1,则数据无效 */
dev->ps = 0;
else /* 读取PS传感器的数据 */
dev->ps = ((unsigned short)(buf[5] & 0X3F) << 4) | (buf[4] & 0X0F);
}
//
///之下是IIC驱动框架搭建,之上时AP3216C寄存器数据读写函数编写/
//
/*
* @description : 打开设备
* @param - inode : 传递给驱动的inode
* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量
* 一般在open的时候将private_data指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int ap3216c_open(struct inode *inode, struct file *filp)
{
filp->private_data = &ap3216cdev;
/* 初始化AP3216C */
ap3216c_write_reg(&ap3216cdev, AP3216C_SYSTEMCONG, 0x04); /* 复位AP3216C */
mdelay(50); /* AP3216C复位最少10ms */
ap3216c_write_reg(&ap3216cdev, AP3216C_SYSTEMCONG, 0X03); /* 开启ALS、PS+IR */
return 0;
}
/*
* @description : 从设备读取数据
* @param - filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t ap3216c_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{
short data[3];
long err = 0;
struct ap3216c_dev *dev = (struct ap3216c_dev *)filp->private_data;
/* 向应用返回AP3216C的原始数据 往里填数据*/
ap3216c_readdata(dev);
data[0] = dev->ir;
data[1] = dev->als;
data[2] = dev->ps;
err = copy_to_user(buf, data, sizeof(data));
return 0;
}
/*
* @description : 关闭/释放设备
* @param - filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int ap3216c_release(struct inode *inode, struct file *filp)
{
return 0;
}
/* AP3216C操作函数 */
static const struct file_operations ap3216c_ops = {
.owner = THIS_MODULE,
.open = ap3216c_open,
.read = ap3216c_read,
.release = ap3216c_release,
};
/*
* @description : i2c驱动的probe函数,当驱动与
* 设备匹配以后此函数就会执行
* @param - client : i2c设备
* @param - id : i2c设备ID
* @return : 0,成功;其他负值,失败
*
probe函数
*/
static int ap3216c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
/* 搭建一套完整的字符设备驱动 */
/* 1、构建设备号 */
if (ap3216cdev.major) {
ap3216cdev.devid = MKDEV(ap3216cdev.major, 0);
register_chrdev_region(ap3216cdev.devid, AP3216C_CNT, AP3216C_NAME);
} else {
alloc_chrdev_region(&ap3216cdev.devid, 0, AP3216C_CNT, AP3216C_NAME);
ap3216cdev.major = MAJOR(ap3216cdev.devid);
}
/* 2、注册设备 */
cdev_init(&ap3216cdev.cdev, &ap3216c_ops);
cdev_add(&ap3216cdev.cdev, ap3216cdev.devid, AP3216C_CNT);
/* 3、创建类 */
ap3216cdev.class = class_create(THIS_MODULE, AP3216C_NAME);
if (IS_ERR(ap3216cdev.class)) {
return PTR_ERR(ap3216cdev.class);
}
/* 4、创建设备 */
ap3216cdev.device = device_create(ap3216cdev.class, NULL, ap3216cdev.devid, NULL, AP3216C_NAME);
if (IS_ERR(ap3216cdev.device)) {
return PTR_ERR(ap3216cdev.device);
}
// 让私有数据ap3216cdev 获得client
ap3216cdev.private_data = client;
return 0;
}
/*
* @description : i2c驱动的remove函数,移除i2c驱动的时候此函数会执行
* @param - client : i2c设备
* @return : 0,成功;其他负值,失败
*/
static int ap3216c_remove(struct i2c_client *client)
{
/* 删除设备 */
cdev_del(&ap3216cdev.cdev);
unregister_chrdev_region(ap3216cdev.devid, AP3216C_CNT);
/* 注销掉类和设备 */
device_destroy(ap3216cdev.class, ap3216cdev.devid);
class_destroy(ap3216cdev.class);
return 0;
}
/* 两种匹配表 probe函数调用时候判断两个都成立才行,后面的不为空就行 */
/* 传统匹配方式ID列表 */
static const struct i2c_device_id ap3216c_id[] = {
{"alientek,ap3216c", 0},
{}
};
/* 设备树匹配列表 */
static const struct of_device_id ap3216c_of_match[] = {
{ .compatible = "alientek,ap3216c" },
{ /* Sentinel */ }
};
/* i2c驱动结构体
定义一个probe函数,一个remove函数
*/
/********************I2C驱动的重中之重*************************/
static struct i2c_driver ap3216c_driver = {
.probe = ap3216c_probe,
.remove = ap3216c_remove,
.driver = {
.owner = THIS_MODULE,
.name = "ap3216c",
.of_match_table = ap3216c_of_match,
},
.id_table = ap3216c_id,
};
/*
* @description : 驱动入口函数
* @param : 无
* @return : 无
*/
static int __init ap3216c_init(void)
{
int ret = 0;
//注册i2c_driver
ret = i2c_add_driver(&ap3216c_driver);
return ret;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit ap3216c_exit(void)
{
//注销i2c_driver
i2c_del_driver(&ap3216c_driver);
}
/* module_i2c_driver(ap3216c_driver) */
module_init(ap3216c_init);
module_exit(ap3216c_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zuozhongkai");
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "sys/ioctl.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include <poll.h>
#include <sys/select.h>
#include <sys/time.h>
#include <signal.h>
#include <fcntl.h>
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : ap3216cApp.c
作者 : 左忠凯
版本 : V1.0
描述 : ap3216c设备测试APP。
其他 : 无
使用方法 :./ap3216cApp /dev/ap3216c
论坛 : www.openedv.com
日志 : 初版V1.0 2019/9/20 左忠凯创建
***************************************************************/
/*
* @description : main主程序
* @param - argc : argv数组元素个数
* @param - argv : 具体参数
* @return : 0 成功;其他 失败
*/
int main(int argc, char *argv[])
{
int fd;
char *filename;
unsigned short databuf[3];
unsigned short ir, als, ps;
int ret = 0;
if (argc != 2) {
printf("Error Usage!\r\n");
return -1;
}
filename = argv[1];
fd = open(filename, O_RDWR);
if(fd < 0) {
printf("can't open file %s\r\n", filename);
return -1;
}
// 老规矩,这上面的部分都是模板,下面才是这个app真正写的
// 循环读取
while (1) {
// 读取数据
ret = read(fd, databuf, sizeof(databuf));
// 判断数据 光强度(ALS)、接近距离(PS)和红外线强度(IR)
if(ret == 0) { /* 数据读取成功 */
ir = databuf[0]; /* ir传感器数据 */
als = databuf[1]; /* als传感器数据 */
ps = databuf[2]; /* ps传感器数据 */
printf("ir = %d, als = %d, ps = %d\r\n", ir, als, ps);
}
usleep(200000); /*100ms */
}
close(fd); /* 关闭文件 */
return 0;
}















 7396
7396











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









