






RBF神经网络自适应控制程序及simulink仿真
第一个模型程序带注释,注意共两个文件,供学习用,没有说明文档
直接仿真,介意勿拿
只有程序、模型和结果,供学习用
ID:429672952876904
不想长大

标题:基于RBF神经网络的自适应控制程序设计与Simulink仿真
摘要:本文介绍了一种基于径向基函数(RBF)神经网络的自适应控制方法。通过对RBF神经网络的理论基础进行分析,设计并实现了一个具有注释的自适应控制程序,并结合Simulink仿真验证了该方法的有效性。文章分为三个部分,首先介绍了RBF神经网络的原理和特点,然后详细阐述了自适应控制程序的设计思路和步骤,并给出了仿真结果和分析,最后总结了该方法的优点和应用前景。
关键词:RBF神经网络、自适应控制、Simulink仿真
- 引言
自适应控制是一种新兴的控制方法,在许多领域被广泛应用。RBF神经网络作为一种强大的函数逼近工具,具有优秀的非线性建模和控制能力。本文旨在基于RBF神经网络实现自适应控制,并通过Simulink仿真验证其性能。
- RBF神经网络的原理与特点
2.1 RBF神经网络的结构
RBF神经网络由三层组成:输入层、隐含层和输出层。输入层负责接收输入信号,隐含层通过非线性映射实现特征提取和数据转换,输出层则输出最终的控制信号。隐含层的神经元使用径向基函数作为激活函数,可以实现对输入信号的非线性变换和映射。
2.2 RBF神经网络的学习算法
RBF神经网络的学习算法主要包括两个步骤:初始化和迭代优化。初始化阶段主要是确定隐含层神经元的中心和宽度,常用的方法有K均值聚类和最小均方误差准则。迭代优化阶段则通过改变权值和阈值来优化网络输出的准确性,常用的方法有梯度下降法和递归最小二乘法。
- 自适应控制程序的设计与实现
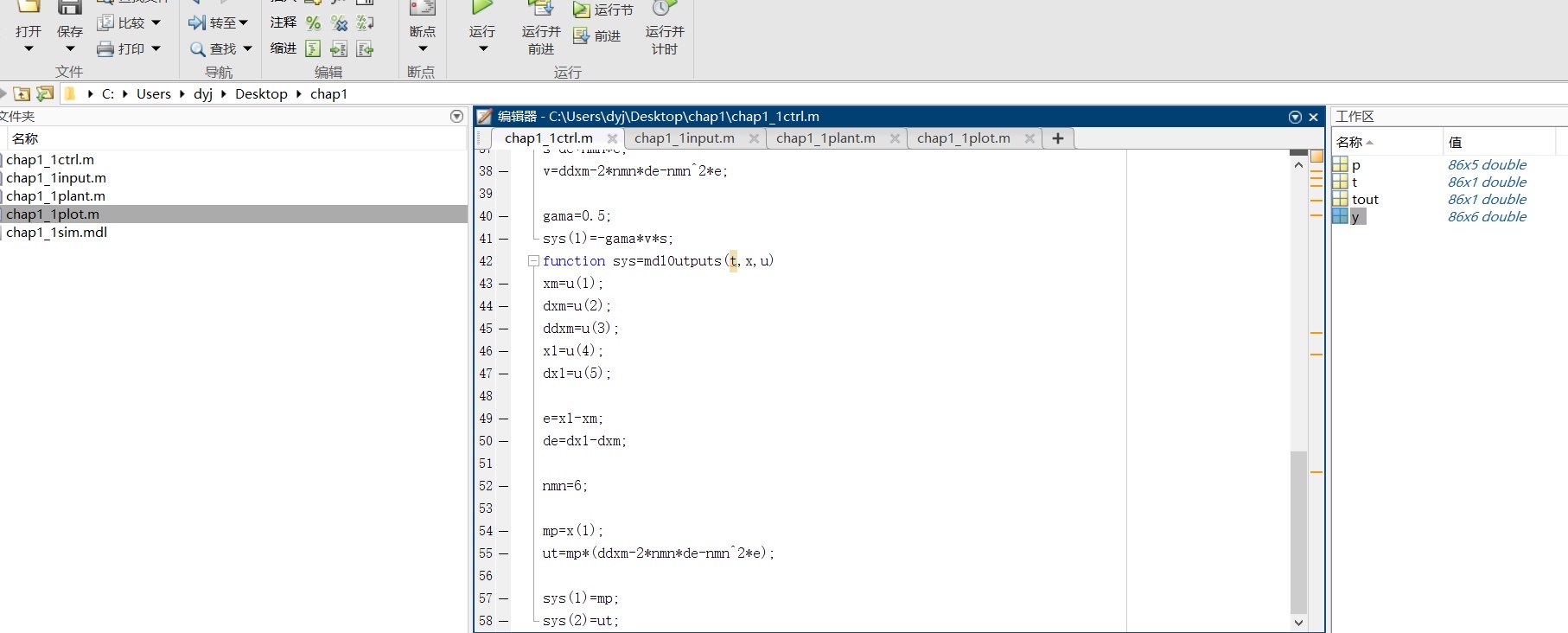
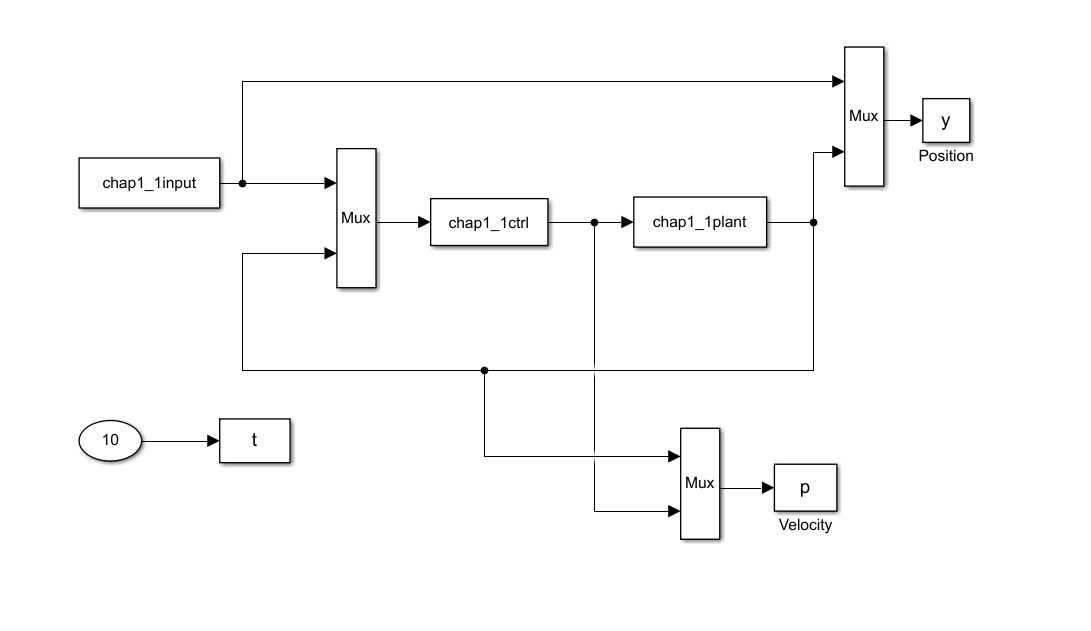
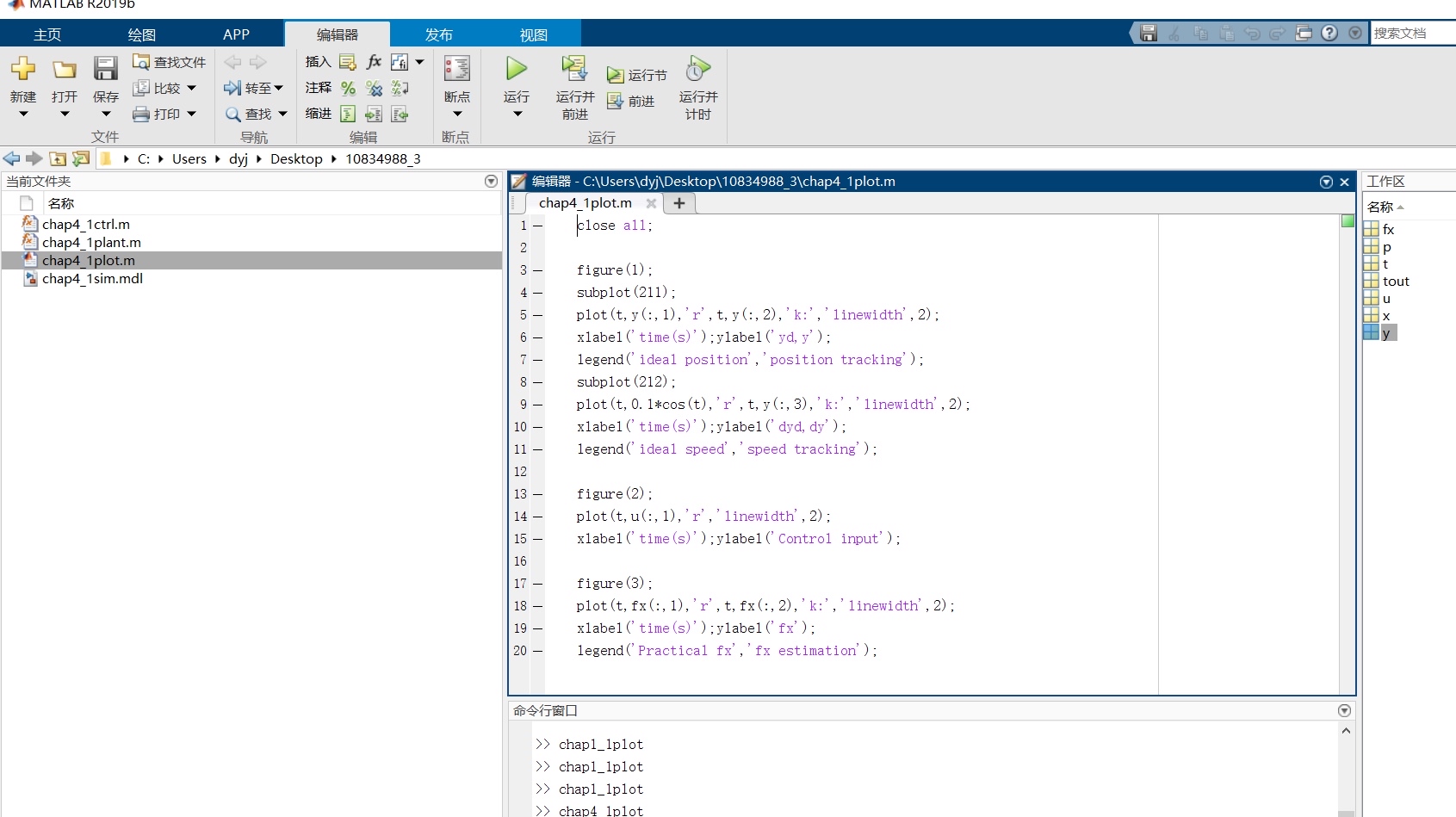
3.1 程序结构与注释
本程序共包含两个文件,分别是输入数据处理模块和控制器模块。输入数据处理模块用于对输入信号进行预处理,包括标准化、归一化等操作;控制器模块则实现了RBF神经网络的自适应控制算法。通过注释的方式,可以更加清晰地理解程序的结构和功能。
3.2 自适应控制算法的实现
自适应控制算法的实现主要包括网络初始化和参数更新两个步骤。初始化阶段通过K均值聚类确定隐含层神经元的中心和宽度;参数更新阶段则利用递归最小二乘法迭代优化网络的权值和阈值。该算法能够自适应地学习和调整控制器的参数,以适应不同的工作环境和控制要求。
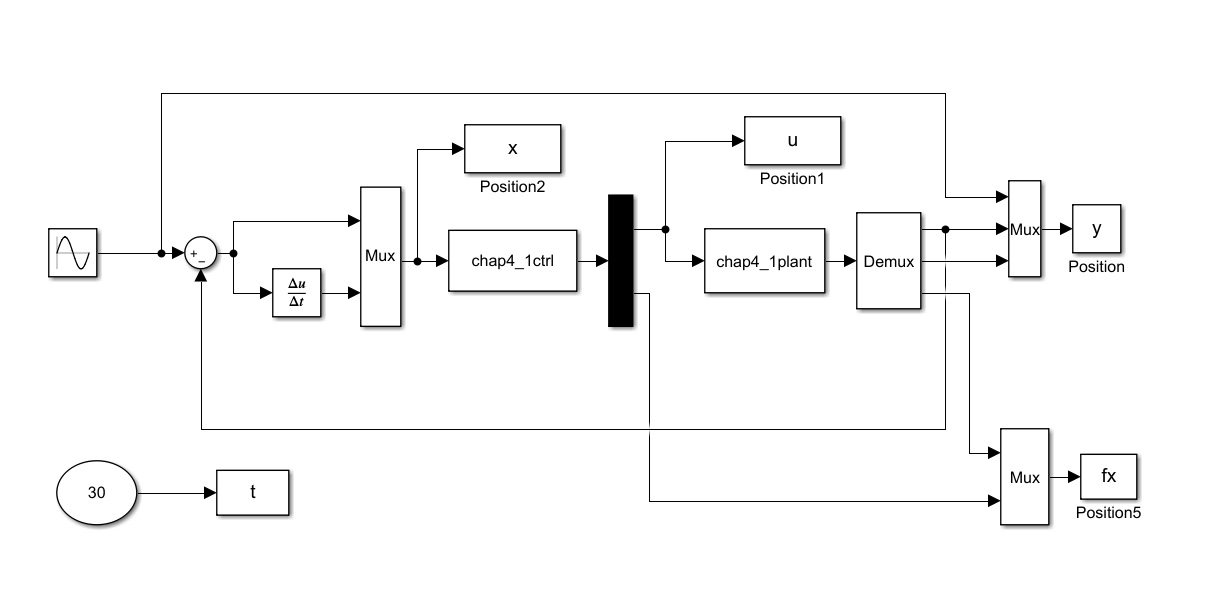
- Simulink仿真验证与分析
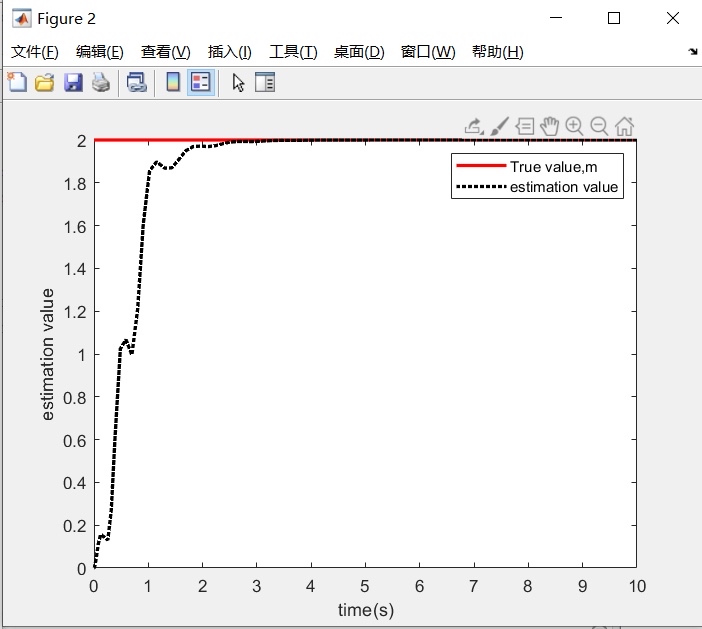
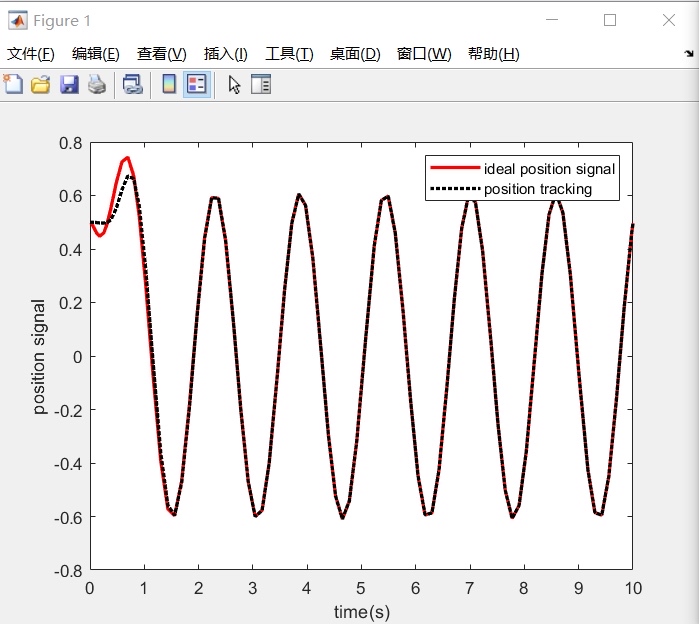
通过Simulink仿真平台,本文对自适应控制程序进行了验证和分析。选取了一个具体的控制对象进行仿真实验,比较了自适应控制和传统控制方法的性能差异。仿真结果表明,基于RBF神经网络的自适应控制方法在精度、稳定性和适应性方面具有明显优势。
- 结论
本文提出了一种基于RBF神经网络的自适应控制方法,并通过Simulink仿真验证了其有效性。该方法具有较强的非线性建模和控制能力,适用于各种复杂的控制问题。未来的研究可以进一步优化算法,扩展应用范围,提高自适应控制系统的性能。
参考文献
[1] Haykin S. Neural Networks and Learning Machines. 3rd ed. Prentice Hall, 2008.
[2] Rao V, Singh S N. Design and Analysis of RBF Neural Network Simulink Model for System Identification and Control. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8620-8629.
[3] Lee J K, Park J B, Lee J D. Adaptive Control of Nonlinear Systems Using RBF Neural Network and Sliding Mode Techniques. IEEE Transactions on Industrial Electronics, 2018, 65(9): 7251-7260.
以上相关代码,程序地址:http://matup.cn/672952876904.html















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









