







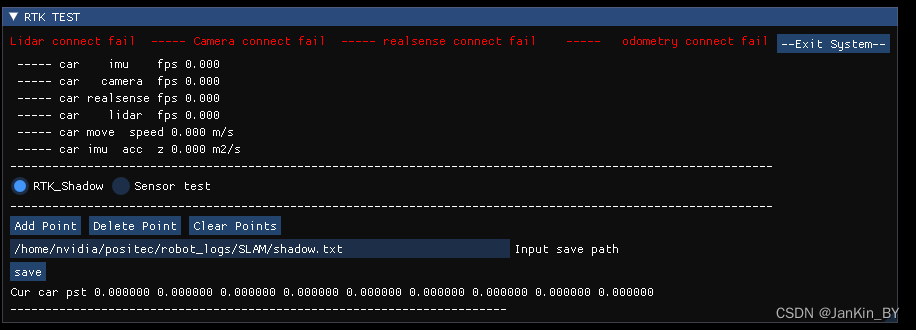
传感器过多的情况下,ros命令检测比较麻烦,直接运行显示界面,可直观查看传感器状态。
依赖:ros+imgui 下载
下载:GitHub - ocornut/imgui at v1.81
整体程序框架
程序源码
#include "imgui.h"
#include "imgui_impl_glfw.h"
#include "imgui_impl_opengl3.h"
#include <stdio.h>
#include <GL/gl3w.h> // Initialize with gl3wInit()
// Include glfw3.h after our OpenGL definitions
#include <GLFW/glfw3.h>
#include <fstream>
#include "ros/ros.h" //包含了使用ROS节点的必要文件
#include "std_msgs/String.h" //包含了使用的数据类型
#include "std_msgs/UInt8MultiArray.h"
#include "std_msgs/MultiArrayDimension.h"
#include "std_msgs/Int8.h" //包含了使用的数据类型
#include "std_msgs/Int16MultiArray.h"
#include "std_msgs/Bool.h"
#include <sstream>
#include <geometry_msgs/TwistStamped.h>
#include <mutex> //定义了C++11标准中的一些互斥访问的类与方法
#include <image_transport/image_transport.h>
#include <sensor_msgs/PointCloud2.h>
#include "sensor_msgs/NavSatFix.h"
#include <cv_bridge/cv_bridge.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgcodecs.hpp>
#include <pcl_ros/transforms.h>
#include <pcl_ros/point_cloud.h>
#include <pcl/point_types.h>
#include <sensor_msgs/Imu.h>
std::mutex loc_mutex;
typedef union{
struct Pst{
float rtk_x;
float rtk_y;
float rtk_z;
float x;
float y;
float z;
float roll;
float pitch;
float yaw;
}Pst_data;
uint8_t detail[36];
}Pst_union;
Pst_union loc_pst={0};
bool is_camera_connected = false;
bool is_lidar_connected = false;
bool is_realsense_connected = false;
bool is_odometry_connected = false;
ros::Time lidar_callback_time;
ros::Time camera_callback_time;
ros::Time realsense_callback_time;
ros::Time odometry_callback_time;
float cutgo_linear_x = 0;
float cutgo_imu_acc_z= 0;
double odom_hz=0;
const int odom_fps_data_num=100;
double odom_fps[odom_fps_data_num+1]={0};
int odom_fps_num=0;
double rgb_hz=0;
const int rgb_fps_data_num=30;
double rgb_fps[odom_fps_data_num+1]={0};
int rgb_fps_num=0;
double lidar_hz=0;
const int lidar_fps_data_num=30;
double lidar_fps[odom_fps_data_num+1]={0};
int lidar_fps_num=0;
double realsense_hz=0;
const int realsense_fps_data_num=30;
double realsense_fps[odom_fps_data_num+1]={0};
int realsense_fps_num=0;
float rtk_x=0.00,rtk_y=0.00,rtk_rcv_x=0.00,rtk_rcv_y=0.00;
float rtk_pos[300][9]={0};
int count=-1,before_count=0;
static int e = 0;
std::ofstream Out_dirStream;
static void glfw_error_callback(int error, const char* description)
{
fprintf(stderr, "Glfw Error %d: %s\n", error, description);
}
void Loc_Callback(const std_msgs::UInt8MultiArray::ConstPtr &msg){
if(msg->data.size()>0)
{
loc_mutex.lock();
for(int i = 0; i < msg->data.size();i++){ //vec_loc size is 12
loc_pst.detail[i]=msg->data[i];
}
loc_mutex.unlock();
//std::cout<<"rtk_x position"<<loc_pst.Pst_data.rtk_x<<std::endl;
}
}
void imageCallback(const sensor_msgs::ImageConstPtr &msg) {
ros::Time time_now = ros::Time::now();
if(rgb_fps_num<rgb_fps_data_num)
{
rgb_fps_num++;
}
else
{
rgb_fps_num=0;
}
rgb_fps[rgb_fps_num]=(time_now - camera_callback_time).toSec();
double fps_average=0;
for(int i=0;i<rgb_fps_data_num;i++)
{
fps_average=fps_average+rgb_fps[i]/rgb_fps_data_num;
}
rgb_hz = 1.0 / fps_average;
camera_callback_time = time_now;
try {
cv::Mat img = cv_bridge::toCvShare(msg, "bgr8")->image;
//*if img exist, then show it
if (img.data) {
is_camera_connected = true;
} else {
is_camera_connected = false;
}
} catch (cv_bridge::Exception &e) {
ROS_ERROR("Could not convert from '%s' to 'bgr8'.", msg->encoding.c_str());
}
}
void realsenseCallback(const sensor_msgs::ImageConstPtr &msg) {
ros::Time time_now = ros::Time::now();
if(realsense_fps_num<realsense_fps_data_num)
{
realsense_fps_num++;
}
else
{
realsense_fps_num=0;
}
realsense_fps[realsense_fps_num]=(time_now - realsense_callback_time).toSec();
double fps_average=0;
for(int i=0;i<realsense_fps_data_num;i++)
{
fps_average=fps_average+realsense_fps[i]/realsense_fps_data_num;
}
realsense_hz = 1.0 / fps_average;
realsense_callback_time = time_now;
try {
cv::Mat img = cv_bridge::toCvShare(msg, "bgr8")->image;
if (img.data) {
is_realsense_connected = true;
} else {
is_realsense_connected = false;
}
} catch (cv_bridge::Exception &e) {
ROS_ERROR("Could not convert from '%s' to 'bgr8'.", msg->encoding.c_str());
}
}
void lidarCallback(const sensor_msgs::PointCloud2ConstPtr &msg) {
ros::Time time_now = ros::Time::now();
if(lidar_fps_num<lidar_fps_data_num)
{
lidar_fps_num++;
}
else
{
lidar_fps_num=0;
}
lidar_fps[lidar_fps_num]=(time_now - lidar_callback_time).toSec();
double fps_average=0;
for(int i=0;i<lidar_fps_data_num;i++)
{
fps_average=fps_average+lidar_fps[i]/lidar_fps_data_num;
}
lidar_hz = 1.0 / fps_average;
lidar_callback_time = time_now;
pcl::PointCloud<pcl::PointXYZ>::Ptr mSphereCloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::fromROSMsg(*msg, *mSphereCloud);
if (mSphereCloud->points.size() > 0||lidar_hz>5) {
is_lidar_connected = true;
} else {
is_lidar_connected = false;
}
}
void imu_callback(const sensor_msgs::ImuConstPtr &imu_msg)
{
cutgo_imu_acc_z = imu_msg->linear_acceleration.z;
}
void odometryCallback(const geometry_msgs::TwistStampedConstPtr &msg) {
ros::Time time_now = ros::Time::now();
if(odom_fps_num<odom_fps_data_num)
{
odom_fps_num++;
}
else
{
odom_fps_num=0;
}
odom_fps[odom_fps_num]=(time_now - odometry_callback_time).toSec();
double fps_average=0;
for(int i=0;i<odom_fps_data_num;i++)
{
fps_average=fps_average+odom_fps[i]/odom_fps_data_num;
}
odom_hz = 1.0 / fps_average;
odometry_callback_time = time_now;
//printf("fps=%lf\n",odom_hz);
if (odom_hz > 90) {
is_odometry_connected = true;
} else {
is_odometry_connected = false;
}
cutgo_linear_x = msg->twist.linear.x;
}
void show_rtk_window()
{
if(ImGui::Button("Add Point"))
{
count++;
loc_mutex.lock();
rtk_pos[count][0]=loc_pst.Pst_data.rtk_x;
rtk_pos[count][1]=loc_pst.Pst_data.rtk_y;
rtk_pos[count][2]=loc_pst.Pst_data.rtk_z;
rtk_pos[count][3]=loc_pst.Pst_data.x;
rtk_pos[count][4]=loc_pst.Pst_data.y;
rtk_pos[count][5]=loc_pst.Pst_data.z;
rtk_pos[count][6]=loc_pst.Pst_data.roll;
rtk_pos[count][7]=loc_pst.Pst_data.pitch;
rtk_pos[count][8]=loc_pst.Pst_data.yaw;
loc_mutex.unlock();
}
ImGui::SameLine();
if(ImGui::Button("Delete Point"))
{
count--;
}
ImGui::SameLine();
if(ImGui::Button("Clear Points"))
{
count=0;
}
static char str0[128] = "/home/nvidia/positec/robot_logs/SLAM/shadow.txt";
ImGui::SetNextItemWidth(500);
ImGui::InputText("Input save path", str0, IM_ARRAYSIZE(str0));
ImGui::PushItemWidth(500);
std::string mSavePath;
mSavePath = str0;
// add a button; if click, save this test name
if (ImGui::Button("save"))
{
Out_dirStream.open(mSavePath, std::ios::out);
Out_dirStream.close();
Out_dirStream.open(mSavePath, std::ios::app);
Out_dirStream.setf(std::ios::fixed,std::ios::floatfield);
Out_dirStream.precision(9);
for(int j=0;j<count+1;j++)
{
Out_dirStream << rtk_pos[j][0] << " "
<< rtk_pos[j][1] << " "
<< rtk_pos[j][2] << " "
<< rtk_pos[j][3] << " "
<< rtk_pos[j][4] << " "
<< rtk_pos[j][5] << " "
<< rtk_pos[j][6] << " "
<< rtk_pos[j][7] << " "
<< rtk_pos[j][8] << " "
<< std::endl;
}
Out_dirStream.close();
std::cout << "mSavePath: " << mSavePath << std::endl;
}
loc_mutex.lock();
ImGui::Text("Cur car pst %f %f %f %f %f %f %f %f %f",loc_pst.Pst_data.rtk_x,loc_pst.Pst_data.rtk_y,loc_pst.Pst_data.rtk_z,loc_pst.Pst_data.x,loc_pst.Pst_data.y,loc_pst.Pst_data.z,loc_pst.Pst_data.roll,loc_pst.Pst_data.pitch,loc_pst.Pst_data.yaw);
ImGui::Text("-----------------------------------------------------------------------");
loc_mutex.unlock();
for(int i=0;i<count+1;i++)
{
ImGui::Text("points_num=%d,position %f %f %f %f %f %f %f %f %f",i, rtk_pos[i][0],rtk_pos[i][1],rtk_pos[i][2],rtk_pos[i][3],rtk_pos[i][4],rtk_pos[i][5],rtk_pos[i][6],rtk_pos[i][7],rtk_pos[i][8]);
}
}
int main(int argc, char **argv)
{
// Setup window
glfwSetErrorCallback(glfw_error_callback);
if (!glfwInit())
return 1;
// GL 3.0 + GLSL 130
const char* glsl_version = "#version 130";
glfwWindowHint(GLFW_CONTEXT_VERSION_MAJOR, 3);
glfwWindowHint(GLFW_CONTEXT_VERSION_MINOR, 0);
// Create window with graphics context
//glfwWindowHint(GLFW_VISIBLE, GLFW_FALSE);
GLFWwindow* window = glfwCreateWindow(1280, 720, "cut and go", NULL, NULL);
if (window == NULL)
return 1;
glfwMakeContextCurrent(window);
glfwSwapInterval(1); // Enable vsync
// Initialize OpenGL loader
bool err = gl3wInit() != 0;
if (err)
{
fprintf(stderr, "Failed to initialize OpenGL loader!\n");
return 1;
}
// Setup Dear ImGui context
IMGUI_CHECKVERSION();
ImGui::CreateContext();
ImGuiIO& io = ImGui::GetIO(); (void)io;
ImGui::StyleColorsDark();
ImGui_ImplGlfw_InitForOpenGL(window, true);
ImGui_ImplOpenGL3_Init(glsl_version);
//ImVec4 clear_color = ImVec4(0.45f, 0.55f, 0.60f, 1.00f);
ros::init(argc, argv, "node_gui"); //初始化ROS,节点名命名为node_a,节点名必须保持唯一
ros::NodeHandle n; //实例化节点, 节点进程句柄
ros::Subscriber sub = n.subscribe("Fusion_pose_50hz", 1000, Loc_Callback);
ros::Subscriber sub_camera = n.subscribe("/camera/rgb/image_raw", 1, imageCallback);
ros::Subscriber sub_realsense = n.subscribe("/camera/color/image_raw", 1, realsenseCallback);
ros::Subscriber sub_lidar = n.subscribe("/zvision_lidar_points", 1, lidarCallback);
ros::Subscriber sub_odometry = n.subscribe("/Ser_odom", 1000, odometryCallback);
ros::Subscriber sub_imu = n.subscribe("/Ser_imu", 100,imu_callback);
ros::Rate loop_rate(50); //设置发送数据的频率为50Hz
ImVec4 clear_color = ImVec4(0.45f, 0.55f, 0.60f, 1.00f);
// Main loop
while (!glfwWindowShouldClose(window)&&ros::ok())
{
glfwPollEvents();
ImGui_ImplOpenGL3_NewFrame();
ImGui_ImplGlfw_NewFrame();
ImGui::NewFrame();
ros::spinOnce(); //不是必须,若程序中订阅话题则必须,否则回掉函数不起作用。
loop_rate.sleep(); //按前面设置的10Hz频率将程序挂起
static float f = 0.0f;
ImGui::Begin("RTK TEST"); // Create a window called "Hello, world!" and append into it.
if (abs(lidar_callback_time.toSec() - ros::Time::now().toSec()) < 1)
{
if (!is_lidar_connected)
{
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(255, 0, 0, 255));
ImGui::Text("Lidar connect fail");
ImGui::PopStyleColor();
}
else
{
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(0, 255, 0, 255));
ImGui::Text("Lidar connect success");
ImGui::PopStyleColor();
}
}
else
{
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(255, 0, 0, 255));
ImGui::Text("Lidar connect fail");
ImGui::PopStyleColor();
}
ImGui::SameLine();
if (abs(camera_callback_time.toSec() - ros::Time::now().toSec()) < 1) {
// is_camera_connected
if (!is_camera_connected) {
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(255, 0, 0, 255));
ImGui::Text(" ----- Camera connect fail");
ImGui::PopStyleColor();
} else {
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(0, 255, 0, 255));
ImGui::Text(" ----- Camera connect success");
ImGui::PopStyleColor();
}
} else {
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(255, 0, 0, 255));
ImGui::Text(" ----- Camera connect fail");
ImGui::PopStyleColor();
}
//* check back realsense is connected or not, two topics: /camera/color/image_raw /camera/depth/image_rect_raw
ImGui::SameLine();
if (abs(realsense_callback_time.toSec() - ros::Time::now().toSec()) < 1) {
//* if is_realsense_connected false, show the text: realsense detection Failed
if (!is_realsense_connected) {
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(255, 0, 0, 255));
ImGui::Text(" ----- realsense connect fail");
ImGui::PopStyleColor();
} else {
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(0, 255, 0, 255));
ImGui::Text(" ----- realsense connect success");
ImGui::PopStyleColor();
}
} else {
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(255, 0, 0, 255));
ImGui::Text(" ----- realsense connect fail");
ImGui::PopStyleColor();
}
//* check odometry is connected or not, two topics: /Ser_odom
ImGui::SameLine();
if (abs(odometry_callback_time.toSec() - ros::Time::now().toSec()) < 1) {
//* if is_odometry_connected false, show the text: odometry detection Failed
if (!is_odometry_connected) {
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(255, 0, 0, 255));
ImGui::Text(" ----- odometry connect fail");
ImGui::PopStyleColor();
} else {
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(0, 255, 0, 255));
ImGui::Text(" ----- odometry connnect success");
ImGui::PopStyleColor();
}
} else {
ImGui::PushStyleColor(ImGuiCol_Text, IM_COL32(255, 0, 0, 255));
ImGui::Text(" ----- odometry connect fail");
ImGui::PopStyleColor();
}
ImGui::SameLine();
if (ImGui::Button("--Exit System--"))
{
ros::shutdown();
}
ImGui::Text(" ----- car imu fps %.3f", odom_hz);
ImGui::Text(" ----- car camera fps %.3f", rgb_hz);
ImGui::Text(" ----- car realsense fps %.3f", realsense_hz);
ImGui::Text(" ----- car lidar fps %.3f", lidar_hz);
ImGui::Text(" ----- car move speed %.3f m/s", cutgo_linear_x);
ImGui::Text(" ----- car imu acc z %.3f m2/s", cutgo_imu_acc_z);
ImGui::Text("-------------------------------------------------------------------------------------------------------------");
// bool ImGui::RadioButton(const char *label, int *v, int v_button);
// IMGUI_DEMO_MARKER("Widgets/Basic/RadioButton");
static int e = 0;
ImGui::RadioButton("RTK_Shadow", &e, 0);
ImGui::SameLine();
ImGui::RadioButton("No Function", &e, 1);
ImGui::Text("-------------------------------------------------------------------------------------------------------------");
if (e == 0) {
show_rtk_window();
} else if (e == 1) {
//show_dynamic_window();
}
ImGui::End();
// Rendering
ImGui::Render();
int display_w, display_h;
glfwGetFramebufferSize(window, &display_w, &display_h);
glViewport(0, 0, display_w, display_h);
//glClearColor(clear_color.x * clear_color.w, clear_color.y * clear_color.w, clear_color.z * clear_color.w, clear_color.w);
glClear(GL_COLOR_BUFFER_BIT);
ImGui_ImplOpenGL3_RenderDrawData(ImGui::GetDrawData());
glfwSwapBuffers(window);
}
// Cleanup
ImGui_ImplOpenGL3_Shutdown();
ImGui_ImplGlfw_Shutdown();
ImGui::DestroyContext();
glfwDestroyWindow(window);
glfwTerminate();
return 0;
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(gui_rtk)
find_package(catkin REQUIRED COMPONENTS roscpp std_msgs cv_bridge sensor_msgs
image_transport pcl_ros)
catkin_package()
find_package(glfw3 REQUIRED)
find_package(OpenGL REQUIRED)
find_package(OpenCV REQUIRED)
include_directories(${catkin_INCLUDE_DIRS})
include_directories(${OPENGL_INCLUDE_DIR})
include_directories(${OpenCV_INCLUDE_DIRS})
include_directories(${PROJECT_SOURCE_DIR}/imgui-1.83
${PROJECT_SOURCE_DIR}/imgui-1.83/backends
)
include_directories(${CMAKE_CURRENT_SOURCE_DIR}/imgui-1.83/examples/libs/gl3w)
add_definitions(-DIMGUI_IMPL_OPENGL_LOADER_GL3W)
file (GLOB PLATFORM_SRC
./imgui-1.83/examples/libs/gl3w/GL/gl3w.*
./imgui-1.83/backends/imgui_impl_glfw.*
./imgui-1.83/backends/imgui_impl_opengl3.*
)
file(GLOB SRC
./imgui-1.83/*.h
./imgui-1.83/*.cpp
)
add_executable(gui_rtk
src/gui_rtk.cpp
${SRC} ${PLATFORM_SRC}
)
target_link_libraries(gui_rtk ${catkin_LIBRARIES}
glfw
${OPENGL_gl_LIBRARY}
GL
dl
${OpenCV_LIBS}
${PCL_LIBRARIES}
)















 5283
5283











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









