






 本文详细介绍了OmniCoreE10控制柜的特点,以及如何在没有示教器的情况下,通过RobotControlMate插件在Robotstudio上对IRB920机器人进行无示教器调试,包括连接步骤、权限请求、转数计数器更新和程序调试等。
本文详细介绍了OmniCoreE10控制柜的特点,以及如何在没有示教器的情况下,通过RobotControlMate插件在Robotstudio上对IRB920机器人进行无示教器调试,包括连接步骤、权限请求、转数计数器更新和程序调试等。
首先看OmniCore E10控制柜

与IRC5系统控制柜还是有了很大的改进,单相220V电源输入,支持IRB 910INV、IRB 920、IRB 1010、IRB 1090、IRB 1100、IRB 1200、IRB 1300等多种型号机器人。

自带16点数字输入、8点数字输出信号,基本可以满足工具上的动作及检测信号
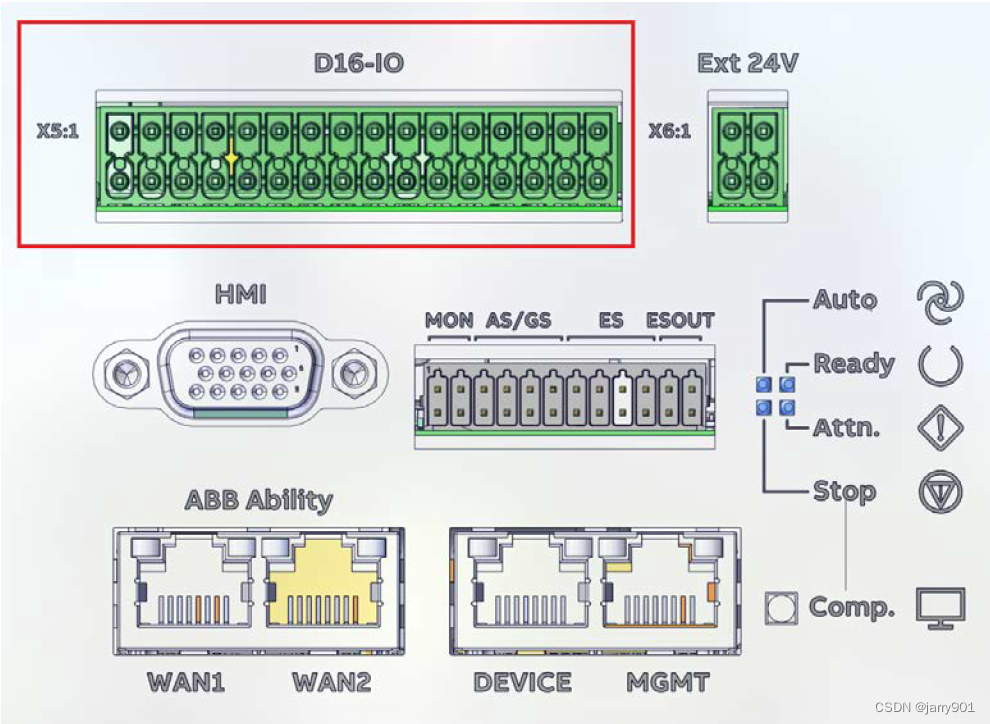
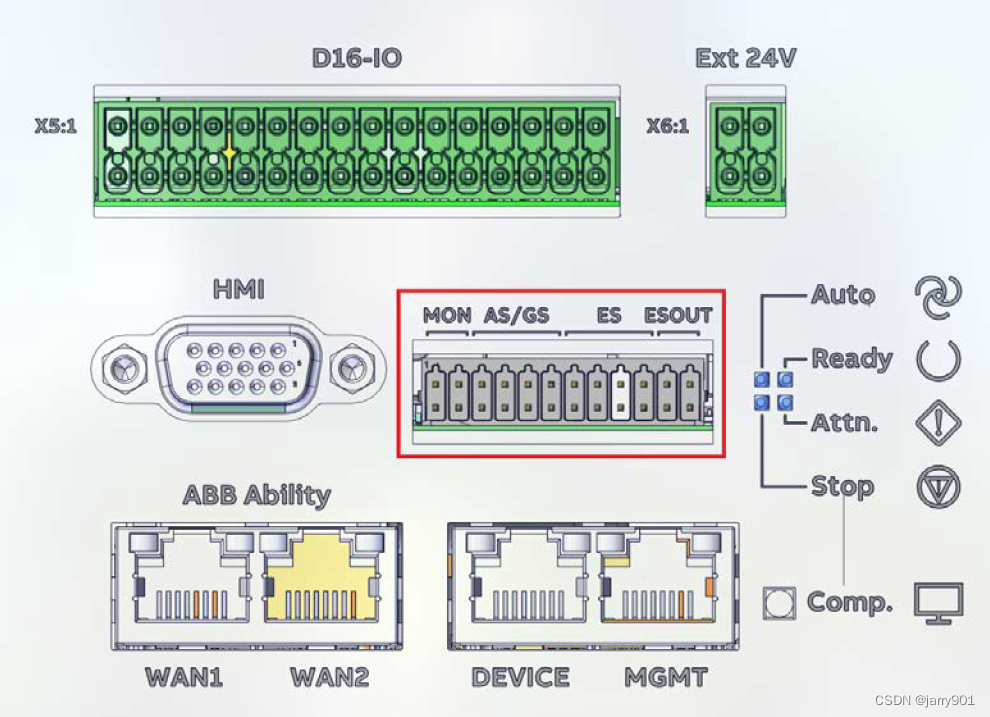
安全接口延续了IRC系列的风格,AS/GS/ES均可双回路接入
IRB920机器人也有多个版本,负载6Kg,臂展分别为0.45/0.55/0.65,标准版防护等级IP30,洁净室版防护等级IP54;

介绍了那么多新的东西,现在来讲讲IRB920搭载E10控制器如何调试。
首先E10控制器是支持无FlexPandent(示教器)的,可以在最新版的Robotstudio上下载调试插件Robot Control Mate或者网页版调试工具Robot Control Mate Web进行无示教器调试,在此之前先要做好以下准备:
1.Robotstudio 2023/2024下载并安装好;
2.安装Robot Control Mate插件;
3.在控制柜上接入一个输入信号,关联系统信号Verify Local Presence;
做好以上准备后,即可开始调试:
电脑连上E10控制柜,接DEVICE或者MGMT口(手册上说MGMT是调试口,DEVICE是外接IO或其他外设的,但巧的是,现场插错了口,发现一样能连。。。)
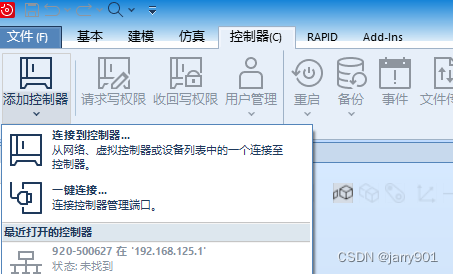
在Robotstudio上控制器菜单里点击“添加控制器”,之后点“连接到控制器”
在打开的对话框中可以搜索到连接的控制器
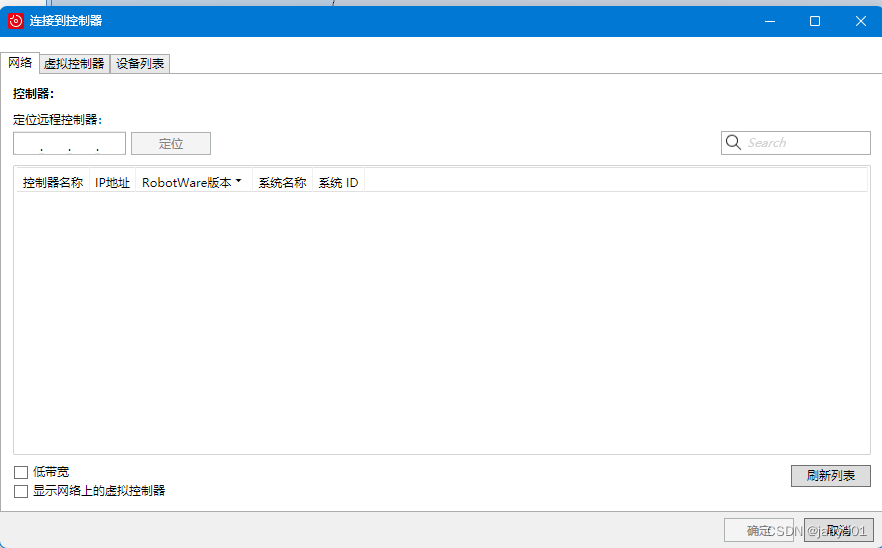
选中后,点击确定,会弹出用户登录界面,点击“以默认用户登录”即可连上控制器
在“控制器”菜单中请求写权限,之后点击安装好的Robot Control Mate插件,打开插件

如果你的电脑是第一次登录连接该控制柜,在没有示教器的情况下,是需要确认本地登录的,否则无法使能电机,也无法使用控制功能,这就要用到准备工作第三步中的点,按照提示,将该输入点通断两次,就可以登录,此时就可以更新转数计数器、微动控制、调试程序了
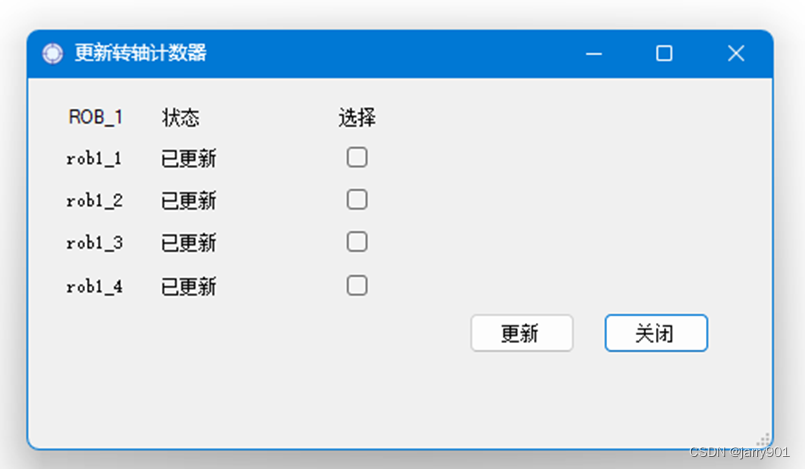
点击“控制”图标,会在Robotstudio界面右侧打开“控制”面板,在没有更新转数计数器之前,电机是不能开启的,所以首先必须更新转数计数器。这里可以先按住机器人本体上的松开抱闸按钮,将机器人按0位标志移动到位,再点击“转数计数器”在弹出的对话框中,选择相应未更新的轴,点击“更新”,经一段时间计算保存后,机器人转数计数器即更新完成。
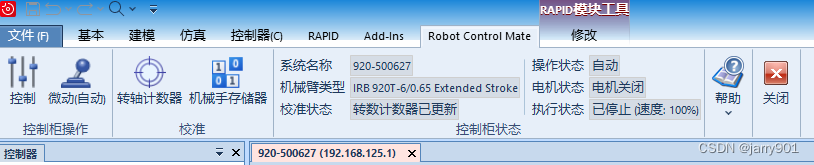
此时,在“控制”面板里点击“电机开启”,即可使能机器人,再点击“微动(自动)”图标,即可打开微动(自动)面板:
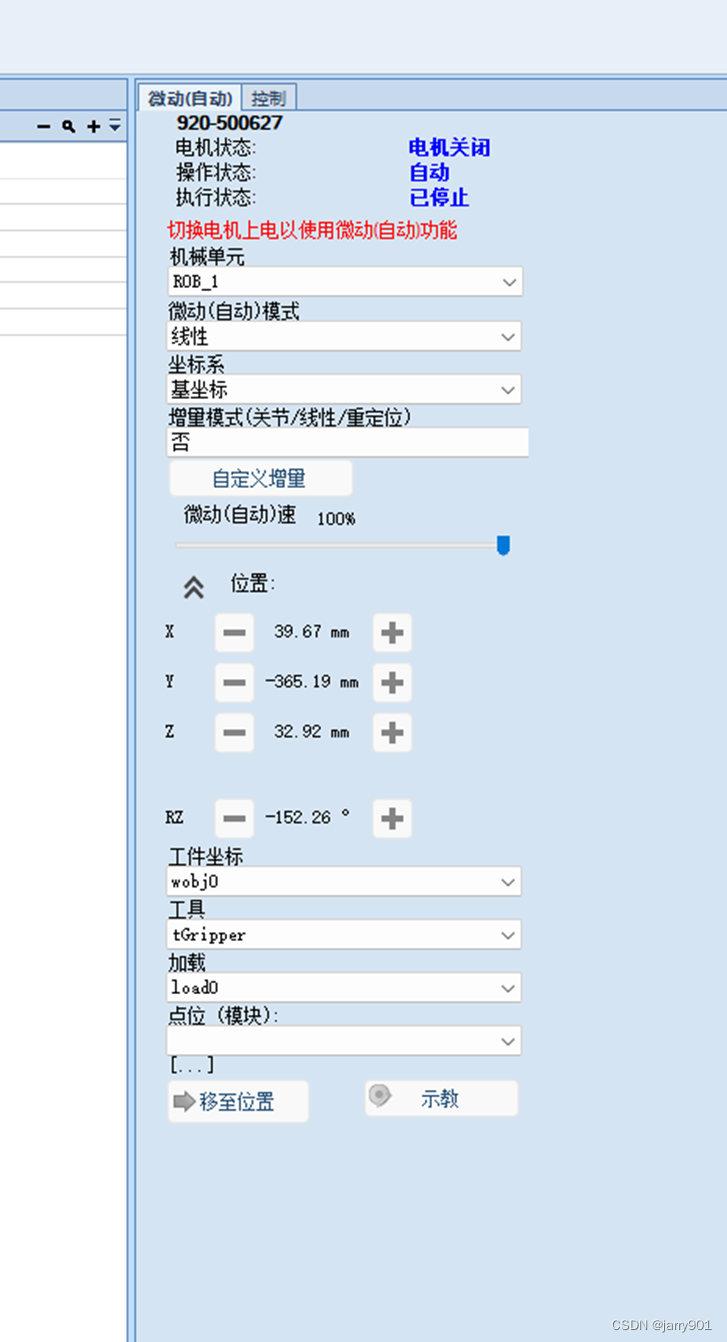
在该面板里基本与示教器上手动操作界面类似,选择微动模式下拉列表,可以选“轴”或“线性”,选中“轴”,则在位置处显示的是四个轴,点击J1-J4对应的-/+可相应的移动该轴的角度,选中“线性”,则位置处显示的是X、Y、Z、Rz,点击对应方向的-/+,可线性移动机器人。
其中的增量模式、工具、工件坐标等的选择都与原来示教器上的手动操作界面类似。
如要示教点位,则在“微动(自动)”面板最下面的“点位”下拉列表选择所需示教的点,点击“移至位置”则机器人会移动到该点(按住按钮,机器人移动,松开则机器人停止,此举是防止点位未调好导致碰撞发生),此时在调整对应的-/+达到实际所需的位置后,点击“示教”按钮,则将当前位置保存到该点位(此处也可以直接松开机器人抱闸,拖动机器人到所需的实际位置,在“控制”面板里点“点击开启”,再回到“微动(自动)”面板,点击示教)。

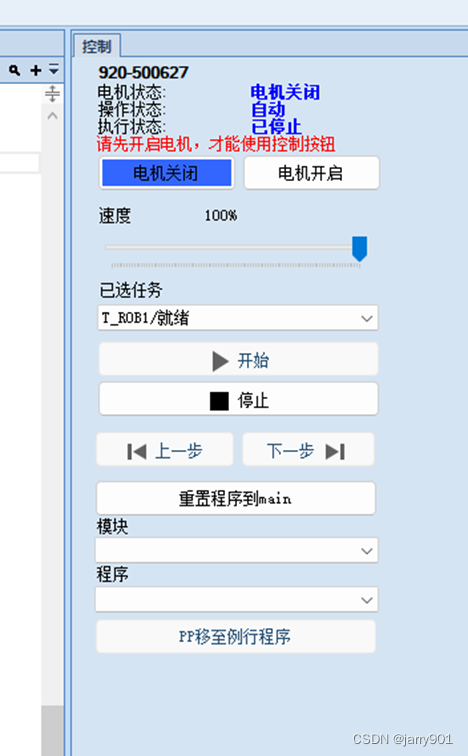
编辑程序与之前Robotstudio里编辑是一样的,此处不再赘述,如果要调试程序,可以打开“控制”面板:
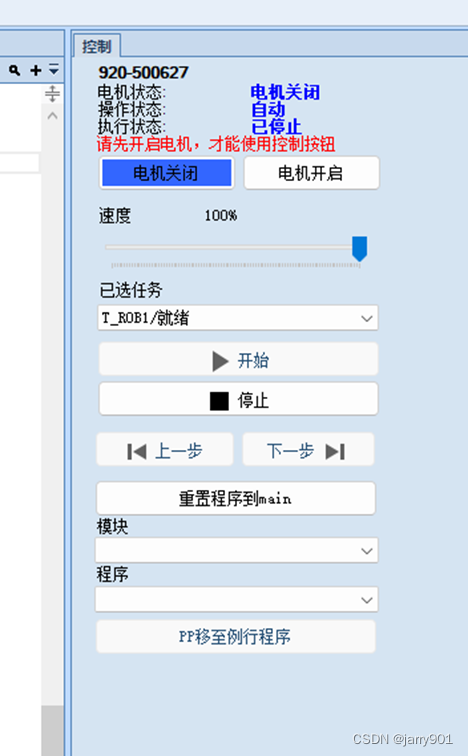
与示教器里“程序编辑”界面类似,也有“PP移至例行程序”,单步执行、开始、停止等按钮,可步进调试程序,也可以调低速度,慢速运行程序进行调整。
实际上,Robot Control Mate插件的思路跟示教器上的界面思路基本一致,界面也比较简洁,打开以后上手十分容易,慢慢熟悉即可。但遗憾的是,用网页版调试插件Robot Control Mate Web尝试,连接控制器均要输入用户名和密码,尝试了好多次也还是无法登陆,最终还是放弃了。。。

















 954
954

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









