







一,Centernet骨干网络之DLASeg

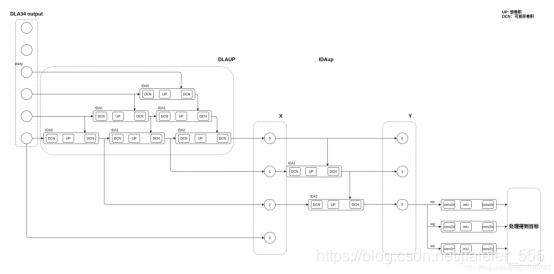
1,DLA34-base结构

代码块:
self.level0 = self._make_conv_level(
channels[0], channels[0], levels[0])
self.level1 = self._make_conv_level(
channels[0], channels[1], levels[1], stride=2)
self.level2 = Tree(levels[2], block, channels[1], channels[2], 2,
level_root=False,
root_residual=residual_root)
self.level3 = Tree(levels[3], block, channels[2], channels[3], 2,
level_root=True, root_residual=residual_root)
self.level4 = Tree(levels[4], block, channels[3], channels[4], 2,
level_root=True, root_residual=residual_root)
self.level5 = Tree(levels[5], block, channels[4], channels[5], 2,
level_root=True, root_residual=residual_root)
其中,level0 是上图第一个黑色框,level1是上图中第二个黑色框,level2到level5分别是上图从左到右4个红框,表示level=[1,2,2,1]的4棵树。
1)黑色框(conv Block)
代码块:
def _make_conv_level(self, inplanes, planes, convs, stride=1, dilation=1):
modules = []
for i in range(convs):
modules.extend([
nn.Conv2d(inplanes, planes, kernel_size=3,
stride=stride if i == 0 else 1,
padding=dilation, bias=False, dilation=dilation),
BatchNorm(planes),
nn.ReLU(inplace=True)])
inplanes = planes
return nn.Sequential(*modules)
结构:

2)绿色框( Aggregation Node)
绿色框是连接2棵树的根节点, forward 函数中接受的是多个对象,用来聚合多个层的信
息,实现:
class Root(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, residual):
super(Root, self).__init__()
self.conv = nn.Conv2d(
in_channels, out_channels, 1,
stride=1, bias=False, padding=(kernel_size - 1) // 2)
self.bn = BatchNorm(out_channels)
self.relu = nn.ReLU(inplace=True)
self.residual = residual
def forward(self, *x):
children = x
x = self.conv(torch.cat(x, 1))
x = self.bn(x)
if self.residual:
x += children[0]
x = self.relu(x)
return x
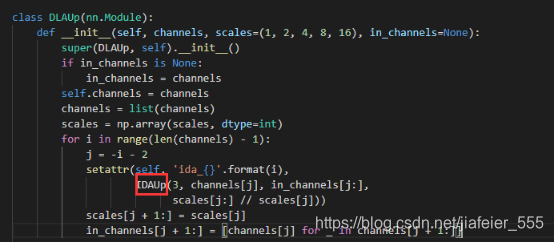
2,DLAUP结构
DLAup本身就是多个IDAup的组合。
二,Centernet loss
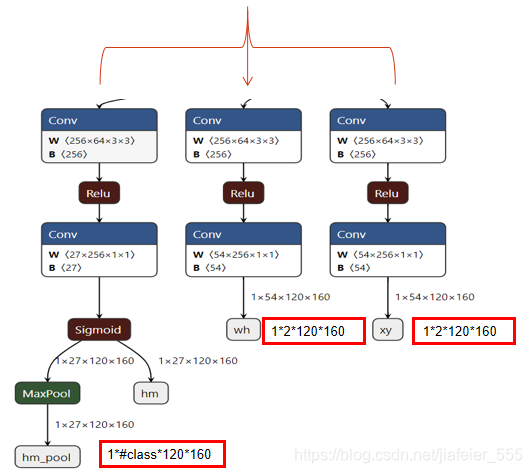
centernet模型输出由3部分组成,分别为hm_head,wh_head,reg_head,故而centernt loss也是由3部分组成,分别为预测类别热力图loss ,预测长宽的loss,以及预测偏移的loss。
并且3种损失权重不一样。

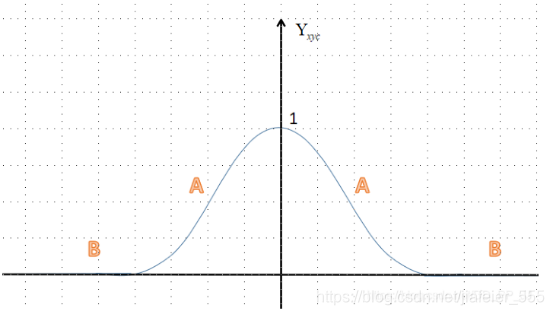
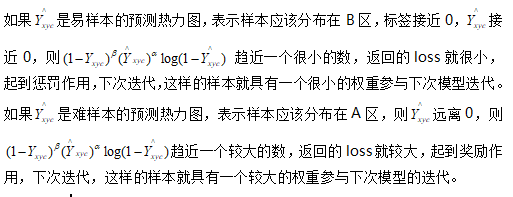
① hm_loss:
1)公式及其原理:

经验值:α = 2 and β = 4
Yxyc表示ground true 的热力图,即heatmap_gt,Yxyc=1,表示标注框的中心点位置。

实现:
def _neg_loss(pred, gt):
''' Modified focal loss. Exactly the same as CornerNet.
Runs faster and costs a little bit more memory
Arguments:
pred (batch x c x h x w)
gt_regr (batch x c x h x w)
'''
pos_inds = gt.eq(1).float() #gt等于1的像素索引,前景
neg_inds = gt.lt(1).float() #gt小于1的像素索引,背景
neg_weights = torch.pow(1 - gt, 4) #背景loss惩罚式
loss = 0
pos_loss = torch.log(pred) * torch.pow(1 - pred, 2) * pos_inds #前景loss计算
neg_loss = torch.log(1 - pred) * torch.pow(pred, 2) * neg_weights * neg_inds #背景loss计算
num_pos = pos_inds.float().sum()
pos_loss = pos_loss.sum()
neg_loss = neg_loss.sum()
if num_pos == 0:
loss = loss - neg_loss
else:
loss = loss - (pos_loss + neg_loss) / num_pos
return loss
② reg_loss:
公式及原理:
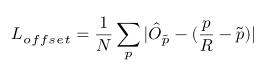
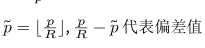
模型输出的featmap_pre是原图尺寸的1/R倍,一般R取4,所以将一个在原图尺寸的标注信息归一化到featmap_pre之后会存在一些小范围的偏移。
比如:一个在原图(10,10)像素点,下采样4倍之后,是2.5,然后向下取整,在featmap_pre上的左边是(2,2),如果我们再将其还原到原图中,则将会被还原到(8,8)上,这样在x,y方向均偏移了2个像素点。所以需要纠正。
③wh_loss:
公式及原理:
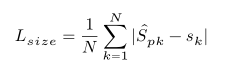
如果类k的标注框是(x1,y1,x2,y2),那么Sk=(abs(x2-x1),abs(y2-y1))
然后对网络输出进行L1Loss。
三,heatmap制作
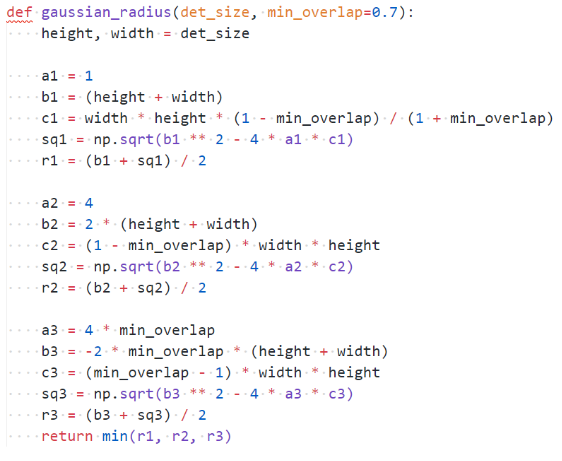
1,高斯半径确定:
如果是训练点,线,即type是point,那么默认高斯半径是3,
如果是训练框,既type是cube,那么高斯半径由目标的高宽决定
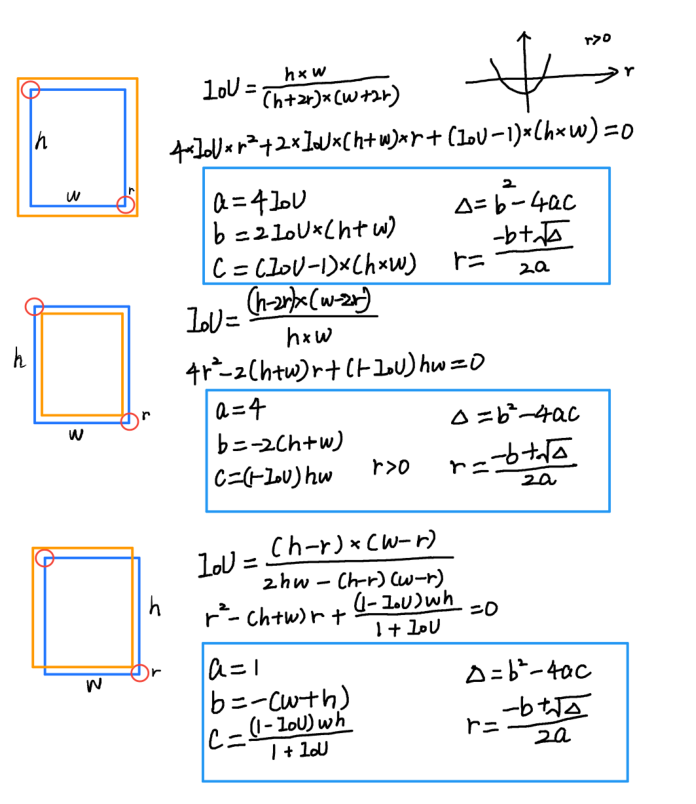
高斯核半径确定的问题由来:

我们想让上图中红色标注框和绿色预测框最大程度的重叠,使两者IOU大于0.7。
那么此时,这两个框的位置最多会有以下三种情况:
2,通过高斯半径产生二维高斯核,
3,根据当前框对应的类别,把高斯核覆盖到对应框中心在Heatmap上对应的位置。














 1388
1388











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









