






一.直流电机驱动电路TB6612FNG
VM :一般接12V(4.5v-15v)
VCC:一般接5V
STBY:1----电机工作 (可以直接接3.3V)
0----电机待机
AIN1:
AIN2;控制电机转动方向
AO1:电机M+
AO2:电机M-
注意:电机的两个引脚有顺序,不要接反了

驱动电路1
TB6612 是双驱动,可以驱动两个电机
驱动 1 路
PWMA 接单片机的 PWM 口
真值表:
AIN1 0 0 1
AIN2 0 1 0
停止 正传 反转
A01
AO2 接电机 1 的两个脚
驱动 2路
PWMB 接单片机的 PWM 口
真值表:
BIN1 0 0 1
BIN2 0 1 0
停止 正传 反转
B01
BO2 接电机 2 的两个脚
逻辑真值表

二.控制电机转向
GPIO口配置:
/*
* 电机控制端GPIO设置
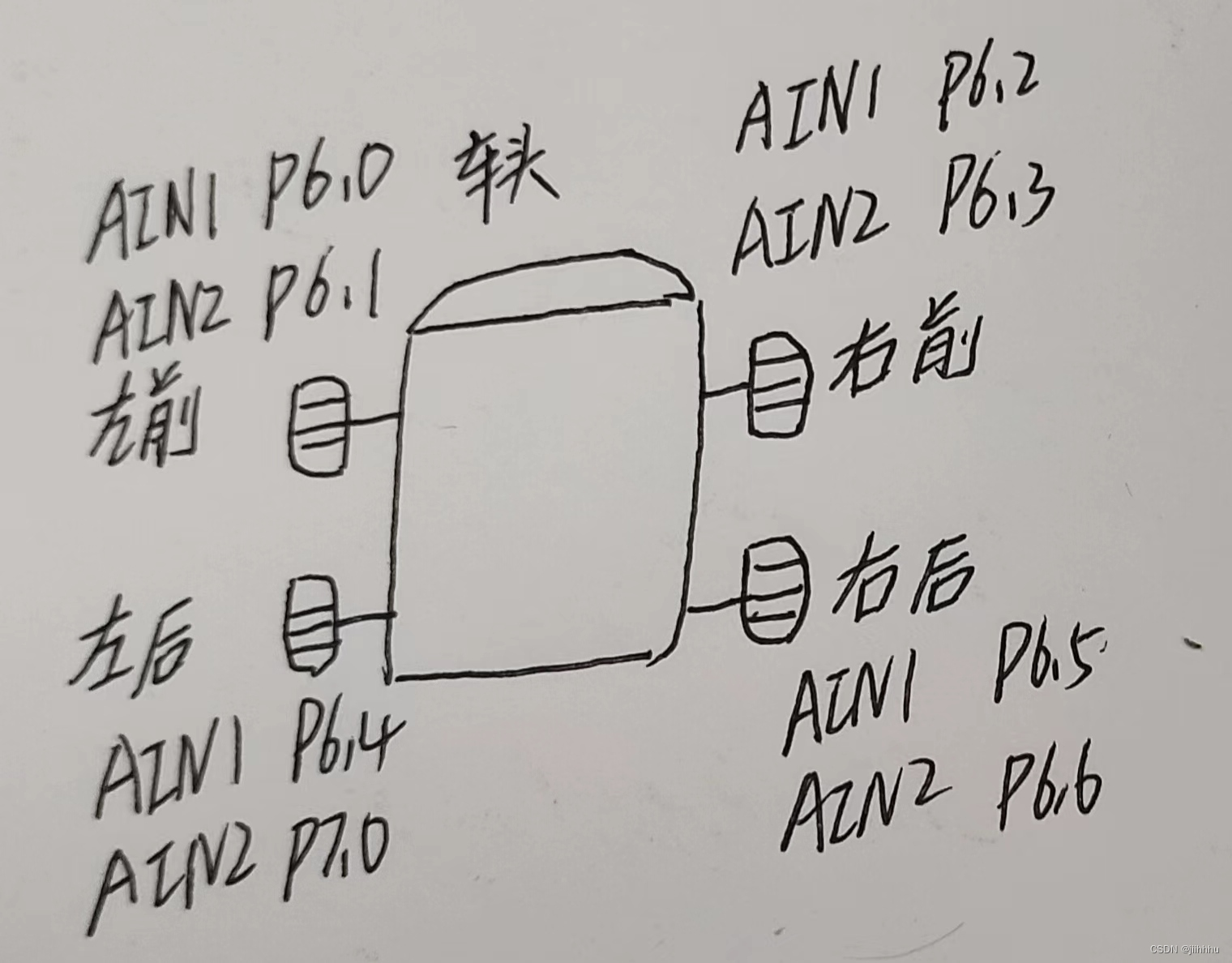
* AIN1 AIN2
* 左前 P6.0 P6.1
* 右前 P6.2 P6.3
* 左后 P6.4 P7.0
* 右后 P6.5 P6.6
*/
void CAR_RUN_Init(void)
{
P6DIR |= BIT0 + BIT1 + BIT2 + BIT3 + BIT4 + BIT5 + BIT6;
P6OUT &= ~(BIT0 + BIT1 + BIT2 + BIT3 + BIT4 + BIT5 + BIT6);
P7DIR |= BIT0;
P7OUT &= ~BIT0;
}控制小车行进方向:
void CAR_F_R(int mode_1)//控制前后行动,控制IN1,IN2
{
switch(mode_1)
{
case 0://前行
P6OUT &= ~(BIT0 + BIT2 + BIT4 + BIT5); //0
P6OUT |= BIT1 + BIT3 + BIT6; //1
P7OUT |= BIT0;
break;
case 1://后退
P6OUT |= BIT0 + BIT2 + BIT4 + BIT5; //1
P6OUT &= ~(BIT1 + BIT3 + BIT6); //0
P7OUT &= ~BIT0; //0
break;
case 2://左转
P6OUT &= ~BIT0; //0,P6.0
P6OUT &= ~BIT1; //0
P6OUT &= ~BIT2; //0,P6.2
P6OUT |= BIT3; //1
P6OUT &= ~BIT4; //0,P6.4
P7OUT &= ~BIT0; //0
P6OUT &= ~BIT5; //0
P6OUT |= BIT6; //1
break;
case 3://右转
P6OUT &= ~BIT0; //0
P6OUT |= BIT1; //1
P6OUT &= ~BIT2; //0
P6OUT &= ~BIT3; //0
P6OUT &= ~BIT4; //0
P7OUT |= BIT0; //1
P6OUT &= ~BIT5; //0
P6OUT &= ~BIT6; //0
break;
case 4://停止
P6OUT &= ~(BIT0 + BIT1 + BIT2 + BIT3 + BIT4 + BIT5 + BIT6); //0
P7OUT &= ~BIT0;
break;
case 5://左旋转
P6OUT &= ~BIT0; //0
P6OUT |= BIT1; //1
P6OUT |= BIT2; //1
P6OUT &= ~BIT3; //0
P6OUT &= ~BIT4; //0
P7OUT |= BIT0; //1
P6OUT |= BIT5; //1
P6OUT &= ~BIT6; //0
break;
case 6://右旋转
P6OUT |= BIT0; //1
P6OUT &= ~BIT1; //0
P6OUT &= ~BIT2; //0
P6OUT |= BIT3; //1
P6OUT |= BIT4; //1
P7OUT &= ~BIT0; //0
P6OUT &= ~BIT5; //0
P6OUT |= BIT6; //1
break;
default:
break;
}
}以下是我自己的小车和板子的连线图
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









