







图像融合后: 参考博文:从泊松方程的解法,聊到泊松图像融合 - 知乎
参考论文:Pérez P, Gangnet M, Blake A. Poisson image editing[M]//ACM SIGGRAPH 2003 Papers. 2003: 313-318.
参考代码:GitHub - cheind/poisson-image-editing: Poisson image editing for seamless cloning and other operations(注意:代码中的梯度场拉普拉斯滤波核有误)
问题分析
在图像融合任务中,前景放置在背景上时,需要保证两点:
-
前景本身主要内容相比于背景而言,尽量平滑;
-
边界处无缝,即前景、背景在边界点位置上的像素值,需要保持边界一致。
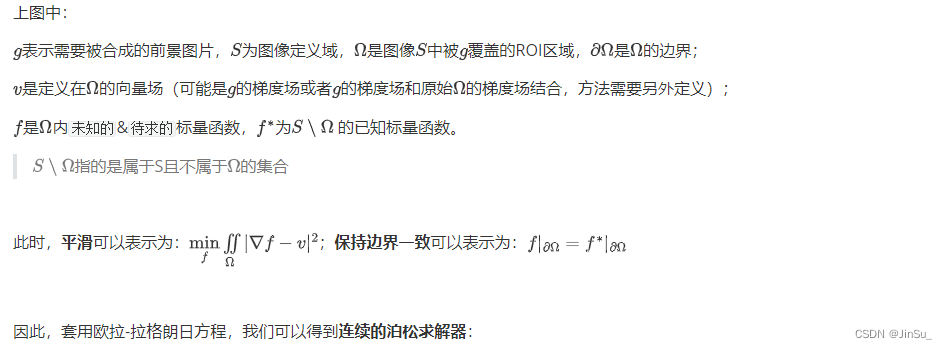
重点关注两个词:内容平滑、边界一致。
平滑是什么?可以理解成图像前景、背景梯度尽可能接近。
边界一致是指什么?可以理解成在边界上像素值相同。
用一张图来说明:
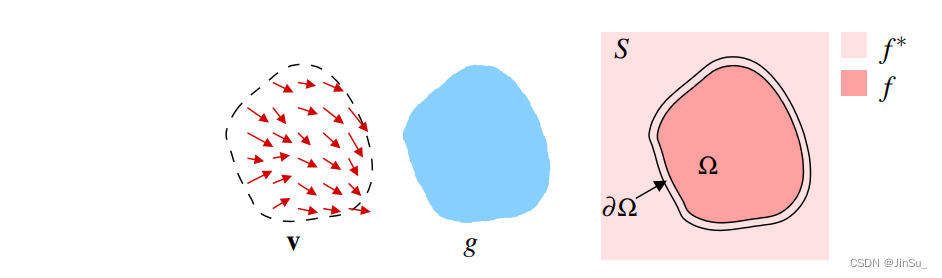
连续的泊松求解器

离散的泊松求解器
对于计算机中的图像定义域是离散的,因此我们需要将连续问题转化为离散问题:

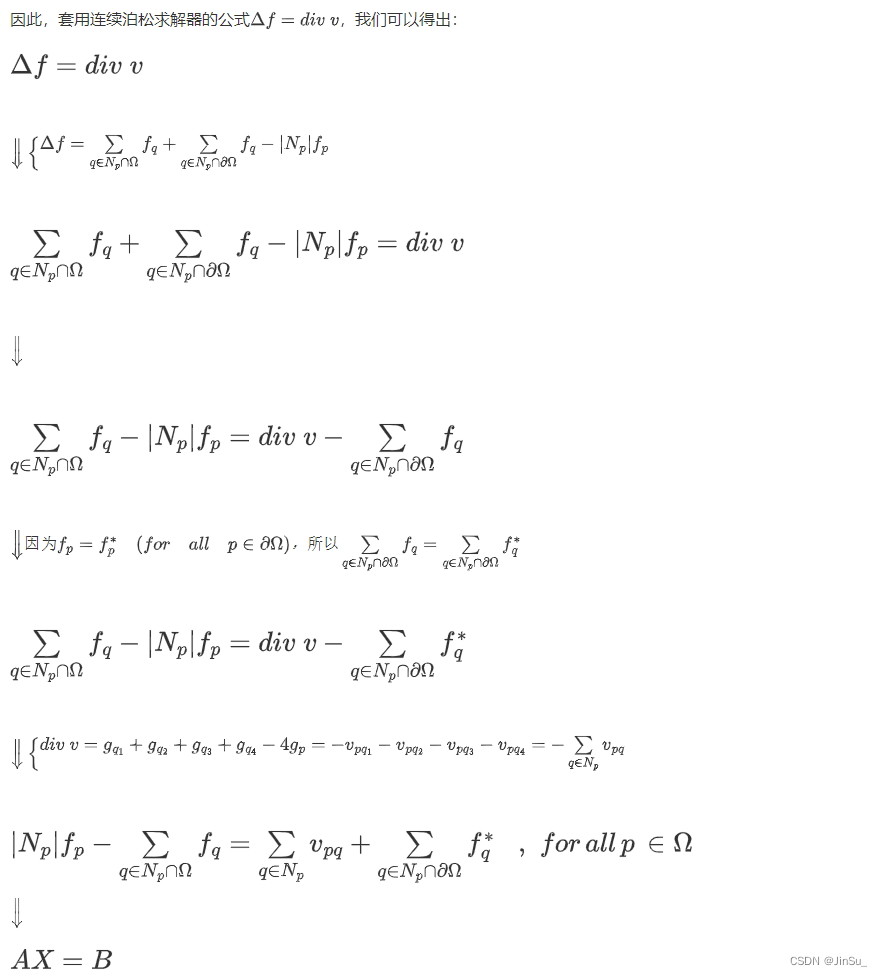
其中,重要变量的具体计算如下所示:
梯度场v的散度

For example,
x方向的梯度kernelx可以是:
`cv::Mat kernelx = (cv::Mat_<float>(1, 3) << 0 , -1, 1);`
然后,再求拉普拉斯kernelx可以是:
`cv::Mat kernelx = (cv::Mat_<float>(1, 3) << -1 , 1, 0);`那么因为,
`f = vxx + vyy`
以及根据对应的拉普拉斯kernelx
`vxx(p.x, p.y) = vx(p.x, p.y) - vx(p.(x-1), p.y)`
以及,对应的梯度kernelx
`vx(p.x, p.y) = g(p.(x+1), p.y)-g(p.x, p.y) `
`vx(p.(x-1), p.y) =g(p.x, p.y)-g(p.(x-1), p.y)`
因此,
`vxx(p.x, p.y) = g(p.(x+1), p.y)-g(p.x, p.y)-g(p.x, p.y)+g(p.(x-1), p.y)`
`vxx(p.x, p.y) = g(p.(x+1), p.y)+g(p.(x-1), p.y)-2*g(p.x, p.y)`
同理计算vyy,
`vyy(p.x, p.y) = g(p.x, p.(y+1)))+g(p.y, p.(y-1))-2*g(p.x, p.y)`
因此可得梯度场的散度,
`f =g(p.(x+1), p.y)+g(p.(x-1), p.y)+g(p.x, p.(y+1)))+g(p.y, p.(y-1))-4*g(p.x, p.y) `
参考:https://github.com/cheind/poisson-image-editing/issues/7这里据一个错误的梯度场求散度的例子,也是参考代码中的一个疏漏:
如果,x方向的梯度kernelx和拉普拉斯kernelx都为 `cv::Mat kernelx = (cv::Mat_<float>(1, 3) << -0.5 , 0, 0.5);`
那么因为,
`f = vxx + vyy`
以及根据对应的拉普拉斯kernelx
`vxx(p.x, p.y) = 0.5*(-vx(p.(x-1), p.y) + vx(p.(x+1), p.y))`
以及,对应的梯度kernelx
`vx(p.(x-1), p.y) = 0.5(-g(p.(x-2), p.y) + g(p.x, p.y))`
`vx(p.(x+1), p.y) = 0.5(-g(p.x, p.y) + g(p.(x+2), p.y))`
因此,
`vxx(p.x, p.y) = 0.5*( -0.5(-g(p.(x-2), p.y) + g(p.x, p.y)) + 0.5( -g(p.x, p.y) + g(p.(x+2), p.y)) )`
`vxx(p.x, p.y) = 0.25*( g(p.(x-2), p.y) - g(p.x, p.y) - g(p.x, p.y) + g(p.(x+2), p.y) )`
`vxx(p.x, p.y) = 0.25*( - 2*g(p.x, p.y) + g(p.(x-2), p.y) + g(p.(x+2), p.y) )`
同理计算vyy,
`vyy(p.x, p.y) = 0.25*( - 2*g(p.x, p.y) + g(p.x, p.(y-2)) + g(p.x, p.(y+2)) )`
因此可得梯度场的散度,
`f = 0.25*( - 4*g(p.x, p.y) + g(p.x, p.(y-2)) + g(p.x, p.(y+2)) + g(p.(x-2), p.y) + g(p.(x+2), p.y) )`方向仍然是正确的,唯一的问题是0.25比例,而且它不完全是 p 的 4 邻居,而是 +2 和 -2 邻居。
但由于 4-neighbor 本身只是离散梯度的近似值,因此这段代码的结果与论文非常相似,只不过还原出来的结果会略有模糊。
矩阵A的构建

其中,这个矩阵A是正方形矩阵,即宽和高相等;每一行代表图像中mask区域的每一个像素点;
对角线的绝对值表示该点的4-neighbor的实际数量,比如-4表示该点4-neighbor的实际数量为4,比如图像边缘点的4-neighbor的实际数量可能为3或者2;非图像边缘点的默认应该都是-4;
若该点的4-neighbor中存在边界点,即mask边缘点,则在`该点对应行`中的`邻点对应列`置为0,否则置为1。
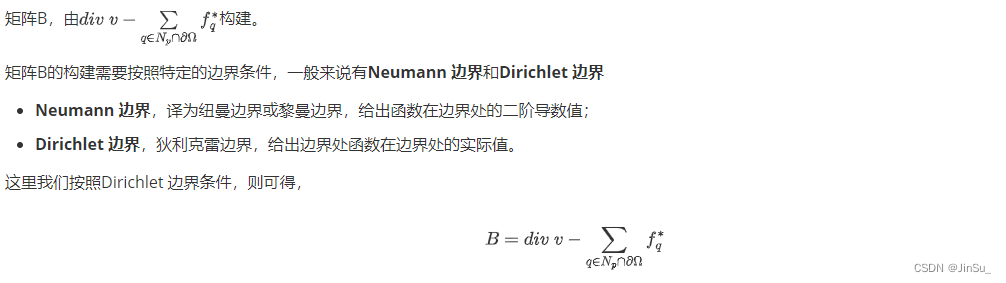
矩阵B的构建
代码中的一些关键参数:
// Directional indices
const int center = 0;
const int north = 1;
const int east = 2;
const int south = 3;
const int west = 4;
// Neighbor offsets in all directions
const int offsets[5][2] = { { 0, 0 }, { 0, -1 }, { 1, 0 }, { 0, 1 }, { -1, 0 } };//4-neighbor的偏移量
// Directional opposite
const int opposite[5] = { center, south, west, north, east };
float lhs[] = { -4.f, 1.f, 1.f, 1.f, 1.f };
//nUnknowns为mask区域中总的像素点数量
std::vector< Eigen::Triplet<float> > lhsTriplets;//矩阵A
lhsTriplets.reserve(nUnknowns * 5);
Eigen::MatrixXf rhs(nUnknowns, channels);//矩阵B
Eigen::SparseLU< Eigen::SparseMatrix<float> > solver;//求解器矩阵A和矩阵B构建过程的对应代码:
for (int n = 1; n < 5; ++n) {
const cv::Point q(x + offsets[n][0], y + offsets[n][1]);
const bool hasNeighbor = bounds.contains(q);
const bool isNeighborDirichlet = hasNeighbor && (bm(q) == constants::DIRICHLET_BD);
if (!hasNeumann && !hasNeighbor) {
lhs[center] += lhs[n];
lhs[n] = 0.f;
} else if (isNeighborDirichlet) {
rhs.row(pid) -= lhs[n] * Eigen::Map<Eigen::VectorXf>(bv.ptr<float>(q.y, q.x), channels);//rhs对应矩阵B
lhs[n] = 0.f;
}
}
// Add f to rhs.
rhs.row(pid) += Eigen::Map<Eigen::VectorXf>(f.ptr<float>(p.y, p.x), channels);//f对应梯度场的散度 div(v)
// Build triplets for row
for (int n = 0; n < 5; ++n) {
if (lhs[n] != 0.f) {
const cv::Point q(x + offsets[n][0], y + offsets[n][1]);
lhsTriplets.push_back(Eigen::Triplet<float>(pid, unknownIdx(q), lhs[n]));//lhsTriplets对应矩阵A
}
}求解AX=B
求解矩阵方程AX=B(比如,LU分解、高斯消元、最速梯度下降法、共轭梯度法等)
代码中采用Eigen::SparseMatrix构建矩阵A,因为这是个稀疏矩阵。
采用Eigen::SparseLU建立求解器solver,
将矩阵A分解为LU,即A=LU(L为下三角矩阵,U为上三角矩阵),然后就可以将问题转换为高斯消元法
Eigen::SparseMatrix<float> A(nUnknowns, nUnknowns);
A.setFromTriplets(lhsTriplets.begin(), lhsTriplets.end());
Eigen::SparseLU< Eigen::SparseMatrix<float> > solver;
solver.analyzePattern(A);
solver.factorize(A);
Eigen::MatrixXf result(nUnknowns, channels);
for (int c = 0; c < channels; ++c)
result.col(c) = solver.solve(rhs.col(c));*后续可以尝试其他求解方法,包括但不限于矩阵A分块求逆、最速梯度下降法、共轭梯度法等
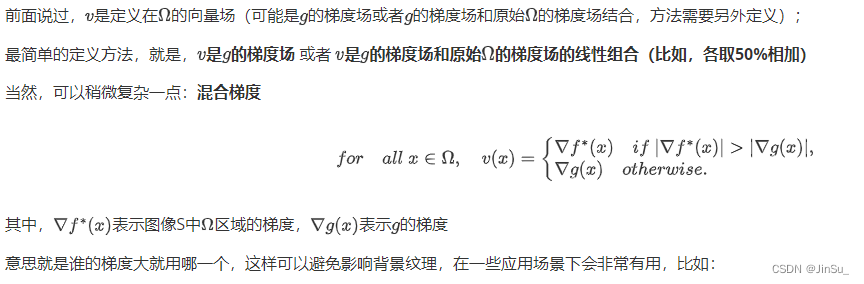
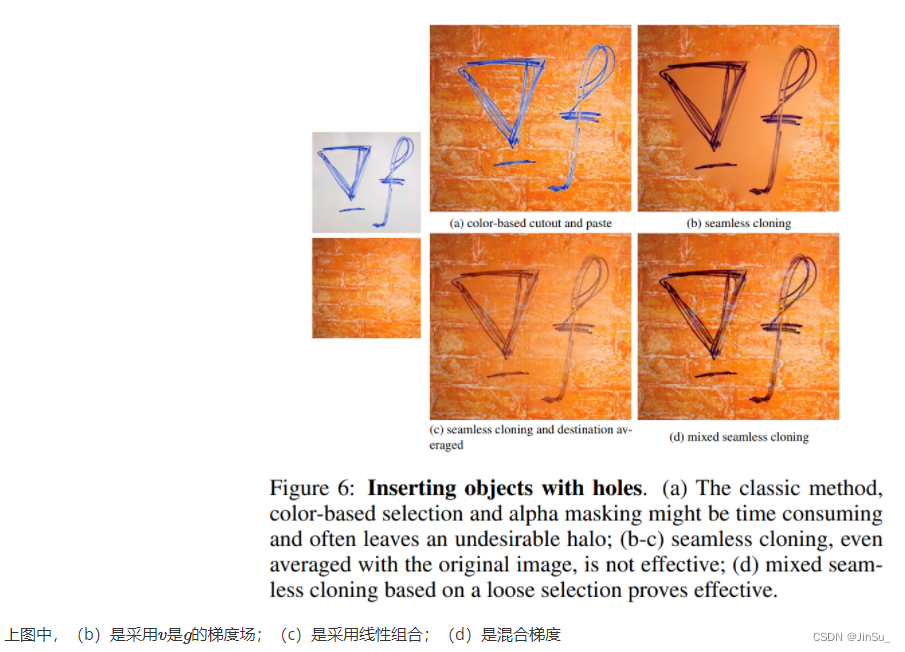
梯度场的定义:混合梯度
实例测试
参考代码:GitHub - cheind/poisson-image-editing: Poisson image editing for seamless cloning and other operations(注意:代码中的梯度场拉普拉斯滤波核有误)
速度会比opencv实现的版本更快一点
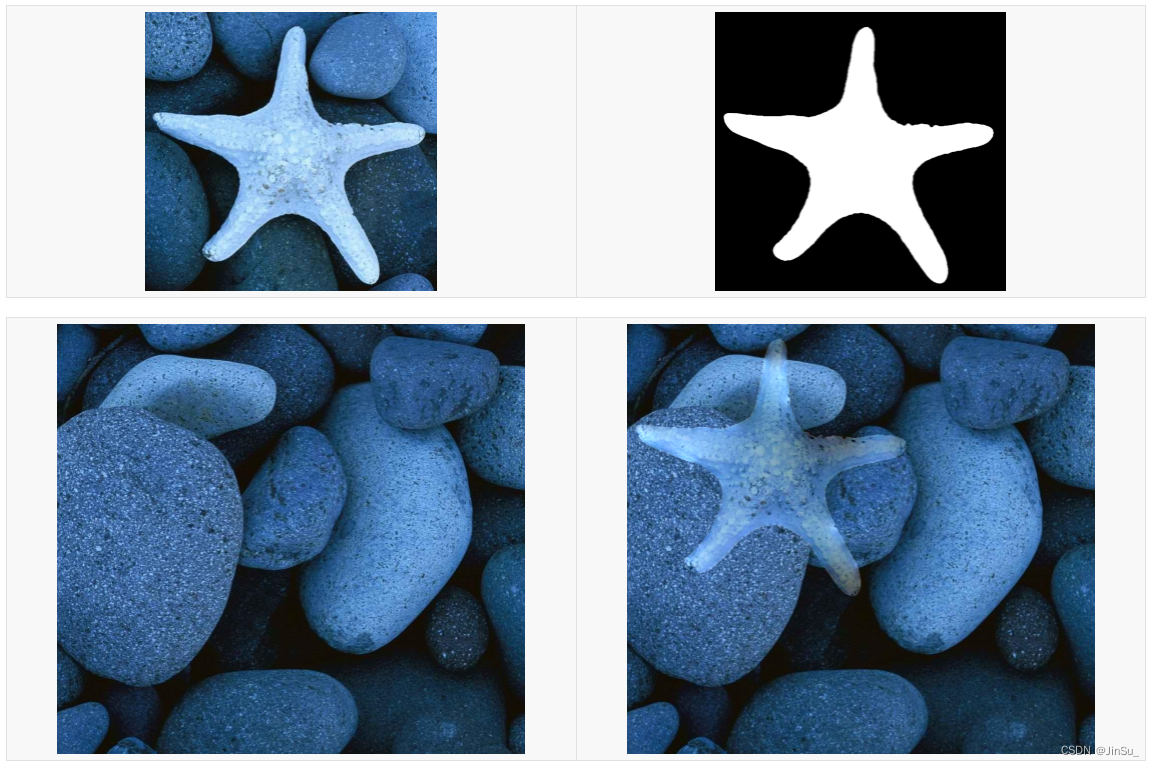
简单贴图
需要准备好,背景图bg,前景图fg,掩膜图mask
其中,前景图和mask图的尺寸要一致
命令行参数(参考):
seamless_cloning ./images/bg2.bmp ./images/fg2.bmp ./images/mask2.bmp 0 0梯度损失——图像模糊问题
对比原图和图像融合后的相同位置的梯度分布
原图:
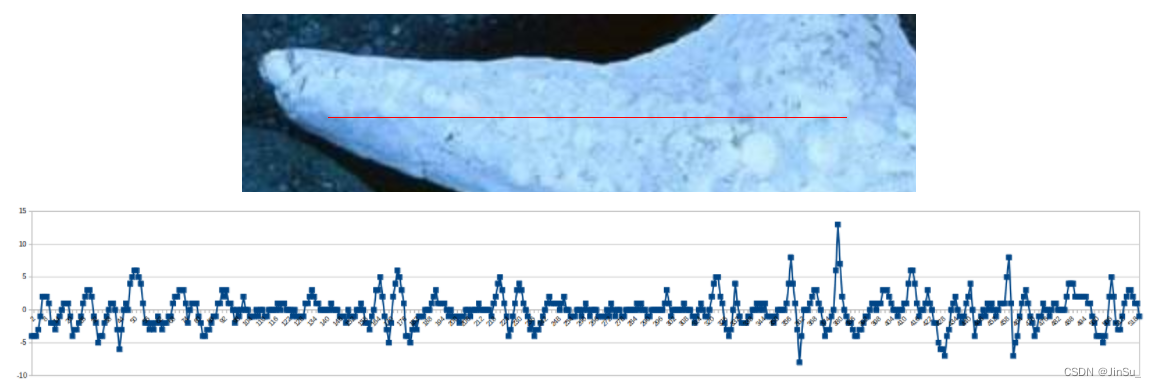
图像融合后:
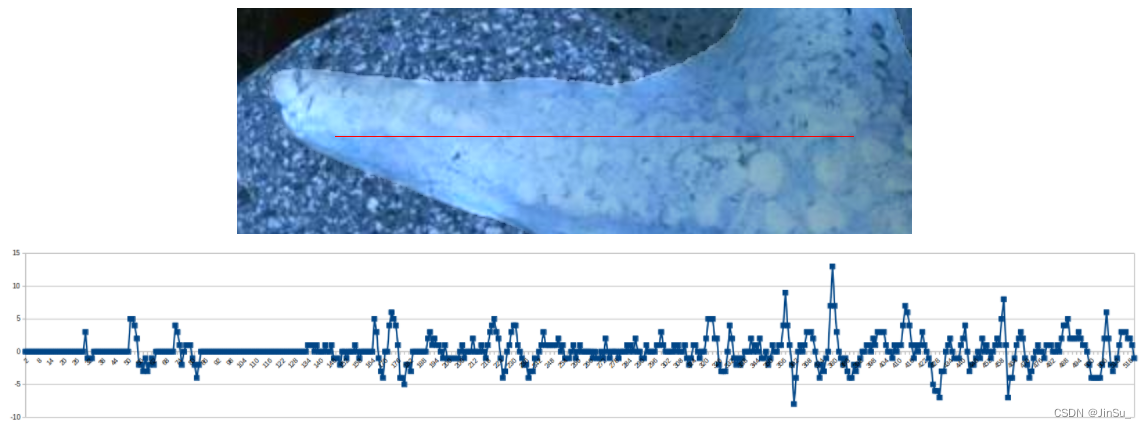
可以很明显地看到融合后的图像变模糊了。
原因分析:梯度场散度的离散求解精度(如果是8-neighbor会更加准确)、边界条件(Dirichlet 边界过于简单,但是也要综合考虑效率)以及泊松编辑原理本身需要考虑到边缘的过渡,模糊也是必然会发生的了。
总结
1.泊松编辑不适用于多线程,更适用于在线融合(对比多波段融合和羽化融合可以多线程处理,适用于半离线或离线处理)
2.当前的泊松编辑方法效率仍然比较慢,后续需要考虑矩阵方程AX=B的其他更高效的求解方法
3.存在编辑区域的图像模糊问题,可以尽量减少模糊至肉眼难以辨别,但是仍然存在。















 5486
5486











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









