






kinect 标定
(ps:本来准备用c++的,结果一时没弄出来。因为赶时间 就改用matlab了)
先用kinect拍照(color basic 里截图)

再用matlab标定
详情见1matlab标定:https://blog.csdn.net/qq_40791099/article/details/106896506
直接使用刚拍的照片图会导致
需要用matlab将 截的图 转换下格式(.bmp转成.bmp),挨个修改即可。
x=imread('F:\lianxi\标定图像\bmp\13.bmp');
imwrite(x,'13','bmp')
你matlab啥路径,图片就保存在啥路径
将修改过的图片导入matlab。
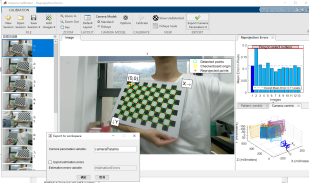
继续操作即可。
最后命令行窗口得到参数
cameraParameters - 属性:
Camera Intrinsics //内参
Intrinsics: [1×1 cameraIntrinsics] //内参矩阵
Camera Extrinsics //外参
RotationMatrices: [3×3×13 double] //旋转、平移矩阵到时候和深度对齐用到
TranslationVectors: [13×3 double]
Accuracy of Estimation //估计准确值
MeanReprojectionError: 0.1125
ReprojectionErrors: [88×2×13 double]
ReprojectedPoints: [88×2×13 double]
Calibration Settings //标定设置
NumPatterns: 13 //使用照片数
WorldPoints: [88×2 double]
WorldUnits: ‘millimeters’
EstimateSkew: 0
NumRadialDistortionCoefficients: 2
EstimateTangentialDistortion: 0
双击cameraParams,看详细数据

其中:
FocalLength 焦距 fx = 1.061786738098219e+03, fy=1.063631909133634e+03
PrincipalPoint 主点坐标 cx=9.656011214817062e+02, cy=5.601369097031076e+02
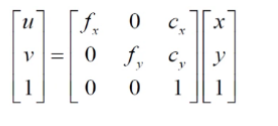
IntrinsicMatrix 内参矩阵(3x3)
1.061786738098219e+03,0,0;
0,1.063631909133634e+03,0;
9.656011214817062e+02,5.601369097031076e+02,1
radialDistortion径向畸变k1= 0.0379, k2= -0.0.47
TangentialDistortion 切向畸变 p1=0, p2=0

张正友标定可以看这个b站视频2,讲的非常好。
















 628
628











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











