








文章目录
Navmesh
Navmesh:在开源项目recastnavigation上修改而来,可以在源码中查看到Recast和Detour的源码
Recast:基于将场景内碰撞,生成用于寻路的导航网格
Detour:基于导航网格进行寻路
UE的架构是支持自己定制寻路方式的(不同ANavigationData),但是内部只提供了Navmesh这一种方式。
Nav Data是什么
在 Build Path 时,World 内会为每一个 Agent 生成一份 NavigationData,用于这种类型角色的寻路。具体流程是:A 在寻路时,根据(PreferredNavData、AgentRadius、AgentHeight)找到最符合的 Agent,然后使用该 Agent 对应的 NavigationData,进行路径搜索,最后找出 N 个点,就是寻找到的路径,然后 AI 就按照这条路径操纵移动组件进行移动(移动流程参考UE4:AI‘s MoveTo——代码分析)
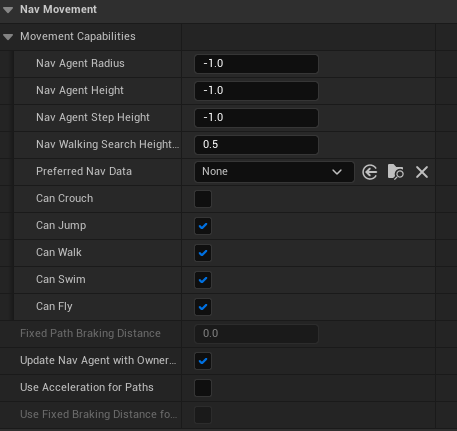
而每个 Agent 有自己的 Nav Data Class,也就是说同样体型不同 Nav Data Class 的情况下需要两个 Agent,以飞行为例,我们需要两个 Agent,一个Walk,一个Fly,当需要进行飞行寻路时,就需要找到 Fly 这个 Agent。而 Fly Agent 生成的 NavigationData,就是用于飞行寻路的基础数据。
Agent 的挑选
在项目设置内,Navigation System 内可以配置一些Agents
在寻路过程中,使用移动组件内的配置去匹配所有Agents
具体的函数如下:
const ANavigationData* UNavigationSystemV1::GetNavDataForProps(const FNavAgentProperties& AgentProperties) const
匹配的规则:
-
首先判断 Preferred Nav Data 是否匹配:
return (PreferredNavData == Other.PreferredNavData || PreferredNavData.IsNull() || Other.PreferredNavData.IsNull()); -
然后用 AgentRadius 和 AgentHeight 进行匹配(默认-1,表示使用胶囊体),挑出最匹配的那个
- 单项更优判断:较大的优先(Agent 比目标大,至少不会出现卡住的情况),都比目标大或者小的情况下,较接近的优先
- 若不符合两项都较优或相同,且之前的Agent不合法(两项有一项是小于目标的),则先使用半径判断,若相同再用高度判断,只有有一项是较优则替换
- 所以,Agent的设置和实际的相同或者大一些
- 注意这里两项相同的情况也会替换,而List本身是项目设置内的逆序,所以默认的Agent排在上面
for(TArray<FNavAgentProperties>::TConstIterator It(AgentPropertiesList); It; ++It) { const FNavAgentProperties& NavIt = *It; const bool bNavClassMatch = NavIt.IsNavDataMatching(AgentProperties); if (!bNavClassMatch) { continue; } // 配置超过AI多少(默认正的绝对比负的好) ExcessRadius = NavIt.AgentRadius - AgentProperties.AgentRadius; ExcessHeight = bSkipAgentHeightCheckWhenPickingNavData ? 0.f : (NavIt.AgentHeight - AgentHeight); // 刚刚好、当前为正最佳为副、同符号接近的 const bool bExcessRadiusIsBetter = ((ExcessRadius == 0) && (BestExcessRadius != 0)) || ((ExcessRadius > 0) && (BestExcessRadius < 0)) || ((ExcessRadius > 0) && (BestExcessRadius > 0) && (ExcessRadius < BestExcessRadius)) || ((ExcessRadius < 0) && (BestExcessRadius < 0) && (ExcessRadius > BestExcessRadius)); const bool bExcessHeightIsBetter = ((ExcessHeight == 0) && (BestExcessHeight != 0)) || ((ExcessHeight > 0) && (BestExcessHeight < 0)) || ((ExcessHeight > 0) && (BestExcessHeight > 0) && (ExcessHeight < BestExcessHeight)) || ((ExcessHeight < 0) && (BestExcessHeight < 0) && (ExcessHeight > BestExcessHeight)); // Valid 认为是不超过配置 const bool bBestIsValid = (BestExcessRadius >= 0) && (BestExcessHeight >= 0); // 是否和Best相同 const bool bRadiusEquals = (ExcessRadius == BestExcessRadius); const bool bHeightEquals = (ExcessHeight == BestExcessHeight); bool bValuesAreBest = ((bExcessRadiusIsBetter || bRadiusEquals) && (bExcessHeightIsBetter || bHeightEquals)); if (!bValuesAreBest && !bBestIsValid) { // 如果之前不是Valid,若半径更好,或者半径相同时高度更好,则更新 bValuesAreBest = bExcessRadiusIsBetter || (bRadiusEquals && bExcessHeightIsBetter); } if (bValuesAreBest) { BestFitNavAgent = NavIt; BestExcessHeight = ExcessHeight; BestExcessRadius = ExcessRadius; } } if (BestFitNavAgent.IsValid()) { NavDataForAgent = AgentToNavDataMap.Find(BestFitNavAgent); NavDataInstance = NavDataForAgent ? NavDataForAgent->Get() : nullptr; }
}
```
NavLinkProxy是什么
有一些游戏机制(例如传送门),使得我们的路径没法使用单纯自动生成的寻路网格,需要增加一些处理。这种情形下我们会用到NavLinkProxy,将两个点之间联通(可选单向),我们的寻路就会将这两个点联通。
当AI到达点A时,会触发NavLinkProxy的Receive Smart Link Reached,这里我们可以自定义AI所需要触发的函数,例如响应传说。
寻路算法
在多边形的基础上使用A*找出最优路径(N个连通的多边形),然后用拉绳法找出内部的最短路径,这部分很多文章都有提到,这里不再赘述。主要讲一下unreal的实现。
FPathFindingResult UNavigationSystemV1::FindPathSync(FPathFindingQuery Query, EPathFindingMode::Type Mode)
// 有两种寻路,FindPath 和 FindHierarchicalPath,第二种是增加的Z轴移动的限制
if (Mode == EPathFindingMode::Regular)
Result = Query.NavData->FindPath(Query.NavAgentProperties, Query);
return (*FindPathImplementation)(AgentProperties, Query);
else // EPathFindingMode::Hierarchical
Result = Query.NavData->FindHierarchicalPath(Query.NavAgentProperties, Query);
// 为了支持其它寻路方式,具体的寻路需要每个不同的Navmesh自己实现,也就是子类设置FindPathImplementation这个函数指针
typedef FPathFindingResult (*FFindPathPtr)(const FNavAgentProperties& AgentProperties, const FPathFindingQuery& Query);
FFindPathPtr FindPathImplementation;
FFindPathPtr FindHierarchicalPathImplementation;
// 在NavMesh构造的时候,将对应的函数设置进入,可以看到,NavMesh没有特写FindHierarchicalPath
ARecastNavMesh::ARecastNavMesh(const FObjectInitializer& ObjectInitializer)
FindPathImplementation = FindPath;
FindHierarchicalPathImplementation = FindPath;
FPathFindingResult ARecastNavMesh::FindPath(const FNavAgentProperties& AgentProperties, const FPathFindingQuery& Query)
// 之前会根据Agent的信息,选择对应的NavData,这份NavData在Recast这个寻路体型中,就是ARecastNavMesh
const ANavigationData* Self = Query.NavData.Get();
const ARecastNavMesh* RecastNavMesh = (const ARecastNavMesh*)Self;
// 调用寻路,这里过了一层FPImplRecastNavMesh* RecastNavMeshImpl
// 官方是意思是为了让recast(开源寻路项目)对其它引擎代码分离,内部的dtNavMesh* DetourNavMesh是核心寻路数据
Result.Result = RecastNavMesh->RecastNavMeshImpl->FindPath(Query.StartLocation, AdjustedEndLocation, Query.CostLimit, *NavMeshPath, *NavFilter, Query.Owner.Get());
ENavigationQueryResult::Type FPImplRecastNavMesh::FindPath(const FVector& StartLoc, const FVector& EndLoc, const float CostLimit, FNavMeshPath& Path, const FNavigationQueryFilter& InQueryFilter, const UObject* Owner) const
NavNodeRef StartPolyID, EndPolyID;
// 根据
const bool bCanSearch = InitPathfinding(StartLoc, EndLoc, NavQuery, QueryFilter, RecastStartPos, StartPolyID, RecastEndPos, EndPolyID);
// 拿到包围盒大小
const FVector NavExtent = NavMeshOwner->GetModifiedQueryExtent(NavMeshOwner->GetDefaultQueryExtent());
// 这里变为XZY,是因为recast的源码内部,XZ是水平面,Y才是垂直方向
const FVector::FReal Extent[3] = { NavExtent.X, NavExtent.Z, NavExtent.Y };
const FVector RecastStartToProject = Unreal2RecastPoint(UnrealStart);
return FVector(-UnrealPoint[0], UnrealPoint[2], -UnrealPoint[1]);
const FVector RecastEndToProject = Unreal2RecastPoint(UnrealEnd);
// 找到离起点和终点最近的多边形
Query.findNearestPoly(&RecastStartToProject.X, Extent, Filter, &StartPoly, &RecastStart.X);
Query.findNearestPoly(&RecastEndToProject.X, Extent, Filter, &EndPoly, &RecastEnd.X);
// 根据起点多边形和终点多边形,找到一条多边形路径
const dtStatus FindPathStatus = NavQuery.findPath(StartPolyID, EndPolyID, &RecastStartPos.X, &RecastEndPos.X, CostLimit, QueryFilter, PathResult, 0);
// 处理这条多边形路径,包括平滑处理(Smoothing)、缩短路径(Shortcutting)和优化路径节点(Path Node Optimization)等操作
// 旨在减少路径的长度和折返次数,提高路径质量。
return PostProcessPathInternal(FindPathStatus, Path, NavQuery, QueryFilter, StartPolyID, EndPolyID, RecastStartPos, RecastEndPos, PathResult);
寻找多边形路径
// Detear 寻找路径
dtStatus dtNavMeshQuery::findPath(dtPolyRef startRef, dtPolyRef endRef, const dtReal* startPos, const dtReal* endPos, const dtReal costLimit, const dtQueryFilter* filter, dtQueryResult& result, dtReal* totalCost) const
// A*的H值
const dtReal H_SCALE = filter->getModifiedHeuristicScale();
// 起点
m_openList->push(startNode);
// 数组模拟的二叉树,实现的小顶堆
m_size++;
bubbleUp(m_size-1, node);
while (!m_openList->empty())
dtNode* bestNode = m_openList->pop();
// 终点理论值最优(G+H)
if (bestNode->id == endRef)
lastBestNode = bestNode;
break;
unsigned int i = bestPoly->firstLink;
// 遍历所有相邻的多边形,dtLink是表示当前多边形对于相邻多边形的link,对保存相邻的多边形,也就是link.ref
while (i != DT_NULL_LINK)
const dtLink& link = m_nav->getLink(bestTile, i);
dtPolyRef neighbourRef = link.ref;
// 判断是否是来时的边
if (!neighbourRef || neighbourRef == parentRef
// 回溯处理
|| !filter->isValidLinkSide(link.side))
continue;
// 根据ref找到tile和poly
m_nav->getTileAndPolyByRefUnsafe(neighbourRef, &neighbourTile, &neighbourPoly);
decodePolyId(ref, salt, it, ip);
*tile = &m_tiles[it];
*poly = &m_tiles[it].polys[ip];
// 判断多边形和Link的合法性,这一步应该可以定制,例如哪些区域在这次寻路中不能通过(高度什么的)
if (!filter->passFilter(neighbourRef, neighbourTile, neighbourPoly) || !passLinkFilterByRef(neighbourTile, neighbourRef))
continue;
// 如果该多边形已经存在对应的节点,则返回对应的节点,否则新建一个(对象池)
dtNode* neighbourNode = m_nodePool->getNode(neighbourRef);
// 当前节点已是close节点
if (shouldIgnoreClosedNodes && (neighbourNode->flags & DT_NODE_CLOSED) != 0) continue;
// 计算G,curCost表示两个多边形之间的代价
curCost = filter->getCost(bestNode->pos, neiPos, parentRef, parentTile, parentPoly, bestRef, bestTile, bestPoly, neighbourRef, neighbourTile, neighbourPoly);
cost = bestNode->cost + curCost;
// 使用距离计算H
heuristic = dtVdist(neiPos, endPos)*H_SCALE;
// 总代价
const dtReal total = cost + heuristic;
// 不是第一次到达,但是当前代价更大
if ((neighbourNode->flags & DT_NODE_OPEN) && total >= neighbourNode->total) continue;
// 新点(或者老的点modify,或者更新,篇幅原因省略)
m_openList->push(neighbourNode);
// 维护最优部分路径(没到达目标里,挑一个离目标最近的)
if (heuristic < lastBestNodeCost)
lastBestNodeCost = heuristic;
lastBestNode = neighbourNode;
// 还原路径
do
dtNode* next = m_nodePool->getNodeAtIdx(node->pidx);
node->pidx = m_nodePool->getNodeIdx(prev);
prev = node;
node = next;
while (node && ++n < loopLimit);
result.reserve(n);
处理出Vector路径
ENavigationQueryResult::Type FPImplRecastNavMesh::PostProcessPathInternal(dtStatus FindPathStatus, FNavMeshPath& Path...)
// 处理同一个多边形内部的情况
if (PathResult.size() == 1 && dtStatusDetail(FindPathStatus, DT_PARTIAL_RESULT))
else
PostProcessPath(FindPathStatus, Path, NavQuery, QueryFilter, StartPolyID, EndPolyID, Recast2UnrVector(&RecastStartPos.X), Recast2UnrVector(&RecastEndPos.X), RecastStartPos, RecastEndPos, PathResult);
void FPImplRecastNavMesh::PostProcessPath(dtStatus FindPathStatus, FNavMeshPath& Path...)
// 初始化 Path.PathCorridorCost(到达每个多边形的代价)
for (int32 i = 0; i < PathSize; i++)
Path.PathCorridorCost[i] = PathResult.getCost(i);
// 初始化 Path.PathCorridor(每个多边形)
for (int i = 0; i < PathSize; ++i)
Path.PathCorridor[i] = PathResult.getRef(i);
if (Path.WantsStringPulling())
// 拉绳算法
Path.PerformStringPulling(StartLoc, UseEndLoc);
FindStraightPath(StartLoc, EndLoc, PathCorridor, PathPoints, &CustomLinkIds);
else:
for (int32 Idx = 0; Idx < Path.PathCorridor.Num(); Idx++)
const dtOffMeshConnection* OffMeshCon = DetourNavMesh->getOffMeshConnectionByRef(Path.PathCorridor[Idx]);
// 收集link id
if (OffMeshCon)
Path.CustomLinkIds.Add(OffMeshCon->userId);
bool FPImplRecastNavMesh::FindStraightPath(const FVector& StartLoc, const FVector& EndLoc, const TArray<NavNodeRef>& PathCorridor, TArray<FNavPathPoint>& PathPoints, TArray<uint32>* CustomLinks) const
// 找一条平滑路径
const dtStatus StringPullStatus = NavQuery.findStraightPath(&RecastStartPos.X, &RecastEndPos.X, PathCorridor.GetData(), PathCorridor.Num(), StringPullResult, DT_STRAIGHTPATH_AREA_CROSSINGS);
for (int32 VertIdx = 0; VertIdx < StringPullResult.size(); ++VertIdx)
// 转换坐标
CurVert->Location = Recast2UnrVector(CurRecastVert);
// 收集link id
const dtOffMeshConnection* OffMeshCon = DetourNavMesh->getOffMeshConnectionByRef(CurVert->NodeRef);
CustomLinks->Add(OffMeshCon->userId);
dtStatus dtNavMeshQuery::findStraightPath(const dtReal* startPos, const dtReal* endPos, const dtPolyRef* path, const int pathSize, dtQueryResult& result, const int options) const
// 找起点、终点到多边形上的最近点
closestPointOnPolyBoundary(path[0], startPos, closestStartPos))
closestPointOnPolyBoundary(path[pathSize-1], endPos, closestEndPos))
// 添加起点到路径
stat = appendVertex(closestStartPos, DT_STRAIGHTPATH_START, path[0], result);
// 以下部分之后有空再写吧,反正就是一个拉绳
xxx
// 添加终点点到路径
stat = appendVertex(closestEndPos, DT_STRAIGHTPATH_END, 0, result);
Build Path 流程
在Build - Build Path,进入到UNavigationSystemV1::Build()
UNavigationSystemV1::Build()
- void UNavigationSystemV1::SpawnMissingNavigationData()
- void UNavigationSystemV1::RebuildAll(bool bIsLoadTime)
- FNavDataGenerator::RebuildAll
就是对每个NavData,运行NavDataGenerator的RebuildAll函数
虚幻Recast dtNavMesh Build流程
https://docs.unrealengine.com/4.27/en-US/API/Runtime/Navmesh/Detour/dtNavMesh/
1. 世界初始化
void FNavigationSystem::AddNavigationSystemToWorld(UWorld& WorldOwner, const FNavigationSystemRunMode RunMode, UNavigationSystemConfig* NavigationSystemConfig, const bool bInitializeForWorld, const bool bOverridePreviousNavSys)
WorldOwner.SetNavigationSystem(NavSysInstance);
WorldOwner.GetNavigationSystem()->InitializeForWorld(WorldOwner, ResolvedRunMode);
// 判断 NavBound
if(!IsThereAnywhereToBuildNavigation())
UnregisterNavData(Nav);
Nav->CleanUpAndMarkPendingKill();
else
// FNavigationBounds -> RegisteredNavBounds
GatherNavigationBounds();
// 注册 NavigationData
RegisterNavigationDataInstances();
RequestRegistrationDeferred(*Nav);
ProcessRegistrationCandidates()
if (bAutoCreateNavigationData == true)
// 生成缺失的NavData
SpawnMissingNavigationData();
ProcessRegistrationCandidates();
else
bCanRebuild = !bIsBuildLocked && GetIsAutoUpdateEnabled();
// 注册NavData
RegisterNavData(NavData);
// 自动 rebuild 时,如果是在编辑器下或者 Dynamic 的情况下,会进行 rebuild
if (bCanRebuild && IsAllowedToRebuild())
NavData->RebuildAll();
// 加载大世界的RecastNavMeshDataChunk
NavData->OnStreamingLevelAdded(Level, World);
2. 处理要注册的 NavData
void UNavigationSystemV1::ProcessRegistrationCandidates()
const ERegistrationResult Result = RegisterNavData(NavDataPtr);
// 编辑器或者不是 Static(这两种情况下不会生成 FNavigationOctreeController::NavOctree)
!World->IsGameWorld() || NavData->SupportsRuntimeGeneration()
(RuntimeGeneration != ERuntimeGenerationType::Static)
MainNavData = GetDefaultNavDataInstance(FNavigationSystem::DontCreate);
ConditionalPopulateNavOctree();
将世界内的数据,填充到八叉树内
bool UNavigationSystemV1::ConditionalPopulateNavOctree()
bSupportRebuilding = RequiresNavOctree();
if (bSupportRebuilding)
ConstructNavOctree();
DefaultOctreeController.NavOctree = MakeShareable(new FNavigationOctree(FVector(0, 0, 0), 64000));
// RuntimeGenerationType: 编辑器下会使用 Dynamic,默认使用最动态的那个
const ERuntimeGenerationType RuntimeGenerationType = GetRuntimeGenerationType();
if (!World->IsGameWorld())
return ERuntimeGenerationType::Dynamic;
max(NavData->GetRuntimeGenerationMode())
// 只在dynamic的情况下,生成Geometry数据,所以ModifierOnly的情况下,没法新建Tile
if(RuntimeGenerationType == ERuntimeGenerationType::Dynamic)
DefaultOctreeController.NavOctree->ComponentExportDelegate = FNavigationOctree::FNavigableGeometryComponentExportDelegate::CreateStatic(&FRecastNavMeshGenerator::ExportComponentGeometry);
// 收集关卡数据
ULevel* Level = World->GetLevel(LevelIndex);
AddLevelToOctree(*Level);
// 处理 Octree
FNavigationDataHandler NavHandler(DefaultOctreeController, DefaultDirtyAreasController);
NavHandler.ProcessPendingOctreeUpdates();
2.1 收集关卡数据
void UNavigationSystemV1::AddLevelToOctree(ULevel& Level)
AddLevelCollisionToOctree(&Level);
FNavigationDataHandler(DefaultOctreeController, DefaultDirtyAreasController).AddLevelCollisionToOctree(*Level);
// 处理关卡 Geometry
if(FNavigationOctree::StoreNavGeometry)
FRecastNavMeshGenerator::ExportVertexSoupGeometry(*LevelGeom, *BSPElem.Data);
OctreeController.NavOctree->AddNode(&Level, nullptr, Bounds, BSPElem);
UpdateActorAndComponentsInNavOctree(*Actor);
// 这里除了Editor之外,还有一个参数bStaticRuntimeNavigation
// -- FNavigationSystem::AddNavigationSystemToWorld
// -- UNavigationSystemModuleConfig::CreateAndConfigureNavigationSystem
// 来自GameMode内,NavigationSystem内的设置
if (IsNavigationSystemStatic())
return;
// 这里除了bStaticRuntimeNavigation外,还有一个bUpdateNavOctreeOnComponentChange用来控制Actor移动后组件是否更新,默认为 true
// -- UNavigationSystemV1::SetUpdateNavOctreeOnComponentChange
if (ShouldUpdateNavOctreeOnComponentChange())
DataHandler.UpdateActorAndComponentsInNavOctree(Actor);
UpdateNavOctreeElement(*Component, *CompNavElement, FNavigationOctreeController::OctreeUpdate_Default);
// 如果Actor实现了INavRelevantInterface,还是要更新自己的
else
DataHandler.UpdateNavOctreeElement(Actor, *NavElement, FNavigationOctreeController::OctreeUpdate_Default);
// 有个bUpdateAttachedActors参数,如果是true的情况下,会更新AttachedActors
DataHandler.UpdateActorAndComponentsInNavOctree(Actor);
更新八叉树
void FNavigationDataHandler::UpdateNavOctreeElement(UObject& ElementOwner, INavRelevantInterface& ElementInterface, int32 UpdateFlags)
const bool bAlreadyExists = OctreeController.GetNavOctreeElementData(ElementOwner, CurrentFlags, CurrentBounds);
UpdateFlags |= FNavigationOctreeController::OctreeUpdate_Refresh;
// 每次都会尝试先删除
UnregisterNavOctreeElement(ElementOwner, ElementInterface, UpdateFlags);
const FSetElementId RequestId = RegisterNavOctreeElement(ElementOwner, ElementInterface, UpdateFlags);
UpdateNavOctreeParentChain(ElementOwner, /*bSkipElementOwnerUpdate=*/ true);
删除元素
bool FNavigationDataHandler::UnregisterNavOctreeElement(UObject& ElementOwner, INavRelevantInterface& ElementInterface, int32 UpdateFlags)
const FOctreeElementId2* ElementId = OctreeController.GetObjectsNavOctreeId(ElementOwner);
if (ElementId != nullptr)
RemoveNavOctreeElementId(*ElementId, UpdateFlags);
OctreeController.RemoveObjectsNavOctreeId(ElementOwner);
NavOctree->ObjectToOctreeId.Remove(HashObject(Object));
else
// 删除父级和同级
if (ParentNode && bCanRemoveChildNode)
UpdateNavOctreeParentChain(*ParentNode);
void FNavigationDataHandler::RemoveNavOctreeElementId(const FOctreeElementId2& ElementId, int32 UpdateFlags)
const FNavigationOctreeElement& ElementData = OctreeController.NavOctree->GetElementById(ElementId);
int32 DirtyFlag = ElementData.Data->GetDirtyFlag();
// Geometry
return ((HasGeometry() || IsPendingLazyGeometryGathering() || Modifiers.GetMaskFillCollisionUnderneathForNavmesh()) ? ENavigationDirtyFlag::Geometry : 0) |
// Modifier 或者是因为LazyGather导致不清楚是否是Modifier
((HasModifiers() || NeedAnyPendingLazyModifiersGathering()) ? ENavigationDirtyFlag::DynamicModifier : 0) |
(Modifiers.HasAgentHeightAdjust() ? ENavigationDirtyFlag::UseAgentHeight : 0);
// 判断是否需要更新的标记,如果UpdateFlags是OctreeUpdate_Geometry或者OctreeUpdate_Modifiers时,会使用对应的DirtyFlag
// 否则使用刚才获取的DirtyFlag
DirtyFlag = GetDirtyFlagHelper(UpdateFlags, DirtyFlag);
// 提交Area
DirtyAreasController.AddArea(ElementData.Bounds.GetBox(), DirtyFlag, [&ElementData] { return ElementData.Data->SourceObject.Get(); }, nullptr, "Remove from navoctree");
if (Flags > 0 && bCanAccumulateDirtyAreas)
// 如果需要更新,提交DirtyArea
DirtyAreas.Add(FNavigationDirtyArea(NewArea, Flags, ObjectProviderFunc ? ObjectProviderFunc() : nullptr));
OctreeController.NavOctree->RemoveNode(ElementId);
2.2 处理收集好的数据
void FNavigationDataHandler::ProcessPendingOctreeUpdates()
修改寻路网格
将 DirtyArea 塞入 DirtyAreasController 的 TArray<FNavigationDirtyArea> DirtyAreas
然后在 void UNavigationSystemV1::Tick(float DeltaSeconds) 内,调用
- RebuildDirtyAreas(DeltaSeconds)
- DefaultDirtyAreasController.Tick
- NavData->RebuildDirtyAreas(DirtyAreas)
将这些 DirtyArea 传递给 ANavigationData 的 FNavDataGenerator 处理
以Recast为例,就是将与 FNavigationDirtyArea 相交的 Tile 进行重建
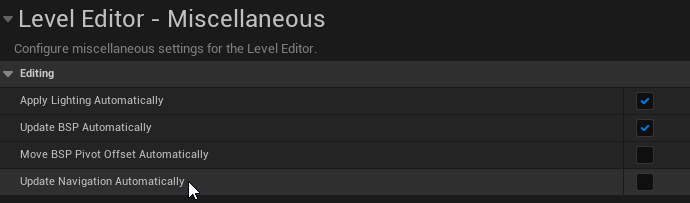
注意,RebuildDirtyAreas(DeltaSeconds) 有一个前提是 IsNavigationBuildingLocked() == false,而当编辑器设置内的 Update Navigation Automatically 为 False 时,NavBuildingLockFlags 会加上 ENavigationBuildLock::NoUpdateInEditor,所以这种情况下除非主动调用 RebuildAll,也就是 Build - Build Path,否则NavData是不会变化的
动态修改寻路
DynamicModifiersOnly
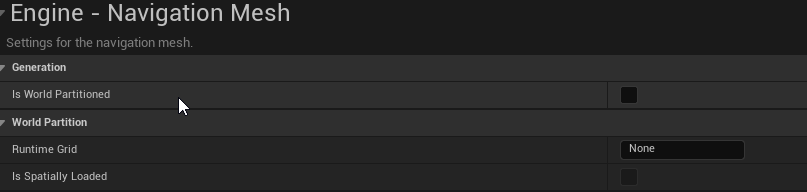
将ProjectSetting内,NavigationMesh的RuntimeGeneration改为DynamicModifiersOnly
针对会移动的障碍,将障碍的StaticMeshComponent的Can Ever Affect Navigation改为False,并且给障碍加上NavModifierComponent。
注意,由于是障碍物,所以需要把NavModifierComponent的AreaClass改为NavArea_Null。
优化动态修改寻路
https://zhuanlan.zhihu.com/p/566846141
大世界下寻路网格的使用
1 老办法
直接加载所有的块,然后build path,注意,为了避免之后加载块导致的build path,在编辑器设置内关闭自动更新导航
2 只在周围生成
只在Invoker周围动态生成寻路数据
参考:
https://www.youtube.com/watch?v=DMe536X4IT0
https://www.youtube.com/watch?v=Smuy2d7y7mA&list=PLNTm9yU0zou7kKcN7091Rdr322Qge5LNA&index=47
第一个视频 核心是开启这个选项(还是需要寻路体积的)

下面的参数是更新周期
然后给中心物体(Pawn)加上Navigation Invoker Component

这样子就会在这个物体周围生成寻路数据了
内部有两个Tile Generation Radius和Tile Removal Radius,表示当区域进入Generation 范围就会生成,离开Removal 范围就会删除
第二个视频是说,如果目标太远了,就在周围找一个目标方向的点过去,靠这种方式慢慢接近
3 world-partitioned做法
操作
https://docs.unrealengine.com/5.0/en-US/world-partitioned-navigation-mesh/
https://docs.unrealengine.com/5.1/en-US/world-partition-in-unreal-engine/
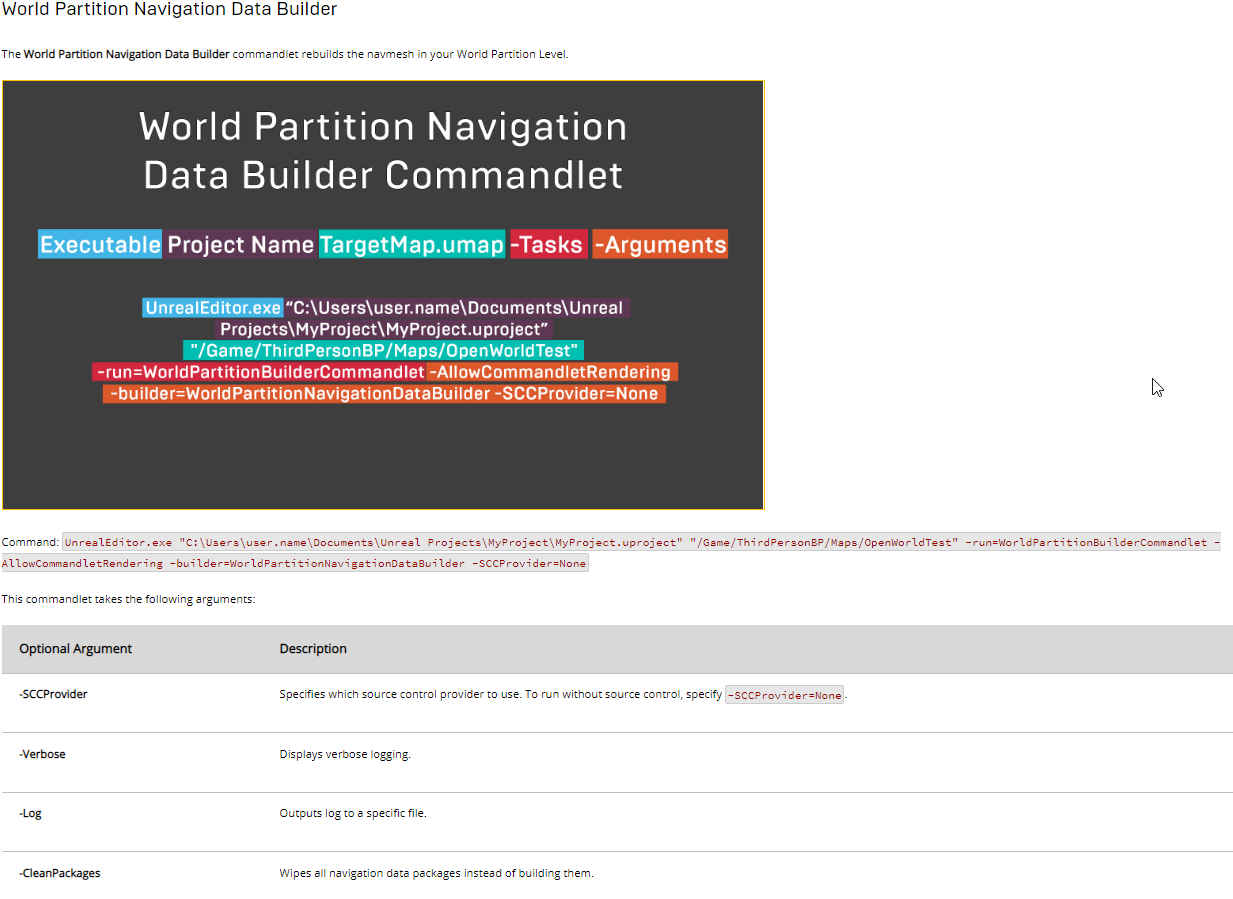
Command: UnrealEditor.exe “C:\Users\user.name\Documents\Unreal Projects\MyProject\MyProject.uproject” “/Game/ThirdPersonBP/Maps/OpenWorldTest” -run=WorldPartitionBuilderCommandlet -AllowCommandletRendering -builder=WorldPartitionNavigationDataBuilder -SCCProvider=None
原理
生成的寻路数据会保存到ChunkActor,对于Recast来说就是对应区域内的FRecastTileData
当区块被加载的时候,会同时加载ANavigationDataChunkActor,这个时候会对每个寻路数据,调用OnStreamingNavDataAdded
以Recast为例,会调用URecastNavMeshDataChunk::AttachTiles,对于存储在ChunkActor内的所有FRecastTileData, 使用NavMesh->addTile附加到NavMesh内
参考
体素化分析:
https://cloud.tencent.com/developer/article/1642373
https://zhuanlan.zhihu.com/p/74537236
其它:
https://zhuanlan.zhihu.com/p/359376662/
https://blog.csdn.net/lqzdreamer/article/details/85108310
http://paper.ijcsns.org/07_book/201212/20121208.pdf
https://www.gamedev.net/tutorials/programming/artificial-intelligence/navigation-meshes-and-pathfinding-r4880/
https://blog.csdn.net/needmorecode/article/details/81416553
https://github.com/recastnavigation/recastnavigation
https://github.com/youlanhai/recastnavigation-learn/tree/master/Recast
dynamic modifier only:
http://digestingduck.blogspot.com/2011/03/temporary-obstacle-processing-overview.html
http://digestingduck.blogspot.com/2011/03/heightfield-layer-progress-pt-3.html

















 983
983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









