






目录
这篇博客是我上《ARM嵌入式》课程的学习总结分享。(如有错误欢迎私信评论补充纠正)
认识STM32
STM32是一系列由STMicroelectronics(意法半导体)公司推出的32位RISC微控制器产品线。这些微控制器广泛应用于各种嵌入式系统中,包括工业控制、消费类电子、汽车电子等领域。STM32系列微控制器具有高性能、低功耗、丰富的外设接口和广泛的软件支持等特点,因此备受工程师和开发者青睐。STM32系列微控制器基于ARM Cortex-M架构,适用于各种不同规模和复杂度的嵌入式系统设计。
(个人理解:集成了许多复杂模块的控制芯片,能实现的功能比AT89C52芯片更加多。应用范围广且价格实惠,更满足了小白对嵌入式的学习需求。)
姿态传感器
姿态传感器是一种能够检测物体在空间中的姿态(即倾斜、旋转等)的传感器。姿态传感器通常包括加速度计、陀螺仪和磁力计等传感器,通过这些传感器检测物体的加速度、角速度和磁场信息,从而确定物体的姿态。姿态传感器在许多应用中被广泛使用,如无人机、机器人、导航系统等领域,可以帮助控制系统准确地感知和理解物体的姿态信息,从而实现精确的控制和导航。
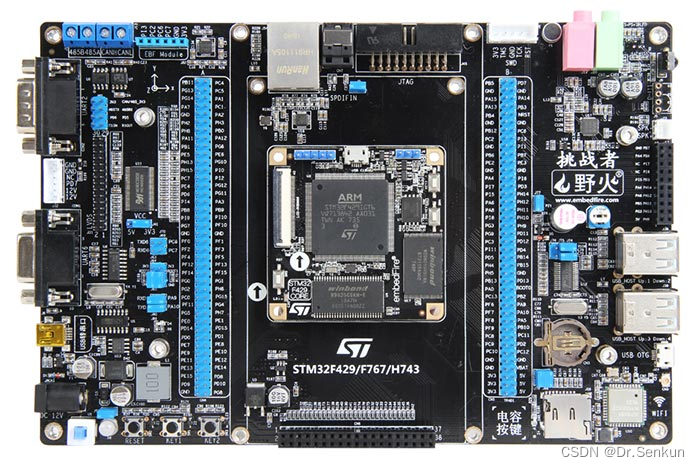
(个人理解:类似手机打游戏里的陀螺仪,可以监测到搭载此传感器物体的空间位置。姿态传感器已经集成在野火STM32F429开发板中,无需接线。)
项目:【STM32】利用姿态传感器实现倾斜报警器
利用姿态传感器实现倾斜报警器的应用范围非常广泛。
1. 工程建筑领域:在建筑工地或者工程施工过程中,姿态传感器可以用来监测建筑物或者工程设备的倾斜情况,及时发现倾斜情况并进行警告,以避免出现安全事故。
2. 车辆领域:姿态传感器可以用来监测车辆的倾斜情况,特别是在越野行驶或者爬坡时,可以帮助驾驶员了解车辆的倾斜角度,以确保安全驾驶。
3. 航空领域:在飞机或者其他航空器上安装姿态传感器,可以实时监测飞机的倾斜角度和姿态,帮助飞行员及时调整飞行姿态,确保飞行安全。
4. 工业自动化领域:姿态传感器可以用来监测工业机器人或者自动化设备的倾斜情况,及时发现异常情况并进行报警,避免设备损坏或者生产事故。
总的来说,利用姿态传感器实现倾斜报警器的应用范围非常广泛,可以在各个领域中帮助监测和预警倾斜情况,保障设备和人员的安全。
实现功能:
制作做一个倾倒报警器,当pitch角或者roll角度大于60度时,蜂鸣器发出“嘀嘀嘀”报警声,角度在正常范围内报警声关闭。
开发板:野火STM32F429
编程软件:Keil uVision5
编程语言:C语言
代码部分
main部分
#include "stm32F4xx.h"
#include "stm32f4xx_conf.h"
#include "stdio.h"
#include "led.h"
#include "key.h"
#include "delay.h"
#include "uart.h"
#include "adc.h"
#include "bsp_lcd.h"
#include "lcd_show_zn.h"
#include "lcd_show_zn_font.h"
#include "gt9xx.h"
#include "MadgwickAHRS.h"
#include "mpu6050.h"
uint16_t select_index = 0; //表明当前选中哪一个菜单项
uint8_t beep_state = 0; //表示蜂鸣器的开关状态 0表示关闭
uint8_t led_state = 0; //表示LED的开关状态 0表示关闭
uint8_t system_time=0;
//编写中断服务函数
void EXTI0_IRQHandler()
{
if(EXTI_GetITStatus(EXTI_Line0) != RESET) //证明触发了中断
{
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
void EXTI15_10_IRQHandler()
{
if(EXTI_GetITStatus(EXTI_Line13) != RESET) //证明触发了中断
{
EXTI_ClearITPendingBit(EXTI_Line13);
}
}
uint8_t warnning_state=0;
int main(void)
{
GPIO_InitTypeDef gpio_info;
//GTP_Init_Panel();
Delay_init();
UART_init(115200);
LED_init();
MPU6050_Init();
//PI11 蜂鸣器
//初始化GPIO-I时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOI,ENABLE);
gpio_info.GPIO_Mode = GPIO_Mode_OUT;
gpio_info.GPIO_OType = GPIO_OType_PP;
gpio_info.GPIO_Pin = GPIO_Pin_11;
gpio_info.GPIO_PuPd = GPIO_PuPd_UP;
gpio_info.GPIO_Speed = GPIO_Low_Speed;
GPIO_Init(GPIOI,&gpio_info);
//作业:1. 通过VOFA+查看IMU6轴融合后得到的姿态角数据
//2. 制作做一个倾倒报警器,当pitch角或者roll角度大于60度时,蜂鸣器发出“嘀嘀嘀”报警声,角度在正常范围内报警声关闭
while(1)
{
system_time+=10; //计算系统时间
Delay_ms(10); //每个循环延时10ms
MadgwickAHRSupdateIMU(10); //该函数的执行间隔是10ms
if(system_time%100) //每100ms通过串口打印一次数据
{
//printf("%d,%d,%d,%d,%d,%d\r\n",Acel[0],Acel[1],Acel[2],Gyro[0],Gyro[1],Gyro[2]);
printf("%f,%f,%f\r\n",pitch,roll,yaw);
}
if( pitch>60 || pitch<-60 || roll>60 || roll<-60 )
{
warnning_state = 1;
}
else
{
warnning_state = 0;
}
if(system_time%1000 == 0 && warnning_state == 1)
{
if(beep_state ==1)
{
GPIO_ResetBits(GPIOI,GPIO_Pin_11);//关闭蜂鸣器
beep_state =0;
}
else
{
GPIO_SetBits(GPIOI,GPIO_Pin_11);//开启蜂鸣器
beep_state =1;
}
}
}//while
}//mian姿态传感器代码部分
MadgwickAHRS.C
#include "MadgwickAHRS.h"
#define ARM_MATH_CM4
#include "arm_math.h"
#define betaDef 0.1f // 2 * proportional gain
/* 敏感系数 */
#define ACC_SENSI 4095.9375f //加速度敏感系数
#define GYRO_SENSI 16.38375f //陀螺仪敏感系数
#define MAG_SENSI 6.66666667f //磁力计敏感系数
/* 常用参数 */
#define DEG2RAD PI/180
//---------------------------------------------------------------------------------------------------
// Variable definitions
volatile float beta = betaDef; // 2 * proportional gain (Kp)
volatile float q0 = 1.0f, q1 = 0.0f, q2 = 0.0f, q3 = 0.0f; // quaternion of sensor frame relative to auxiliary frame
volatile float pitch = 0.0f, roll = 0.0f, yaw = 0.0f;
volatile int tst_q0, tst_q1, tst_q2, tst_q3;
volatile int tst_yaw, tst_roll, tst_pitch;
short Acel[3];
short Gyro[3];
float invSqrt(float x);
void computeAngles(void);
void MadgwickAHRSupdateIMU(uint32_t period)
{
float recipNorm;
float s0, s1, s2, s3;
float qDot1, qDot2, qDot3, qDot4;
float _2q0, _2q1, _2q2, _2q3, _4q0, _4q1, _4q2 ,_8q1, _8q2, q0q0, q1q1, q2q2, q3q3;
float gx=0, gy=0, gz=0, ax=0, ay=0, az=0;
float sampleFreq;
MPU6050ReadAcc(Acel);
MPU6050ReadGyro(Gyro);
gx = (float)Gyro[0]/GYRO_SENSI*DEG2RAD;
gy = (float)Gyro[1]/GYRO_SENSI*DEG2RAD;
gz = (float)Gyro[2]/GYRO_SENSI*DEG2RAD;
ax = (float)Acel[0]/ACC_SENSI;
ay = (float)Acel[1]/ACC_SENSI;
az = (float)Acel[2]/ACC_SENSI;
// Rate of change of quaternion from gyroscope
qDot1 = 0.5f * (-q1 * gx - q2 * gy - q3 * gz);
qDot2 = 0.5f * (q0 * gx + q2 * gz - q3 * gy);
qDot3 = 0.5f * (q0 * gy - q1 * gz + q3 * gx);
qDot4 = 0.5f * (q0 * gz + q1 * gy - q2 * gx);
// Compute feedback only if accelerometer measurement valid (avoids NaN in accelerometer normalisation)
if(!((ax == 0.0f) && (ay == 0.0f) && (az == 0.0f))) {
// Normalise accelerometer measurement
recipNorm = invSqrt(ax * ax + ay * ay + az * az);
ax *= recipNorm;
ay *= recipNorm;
az *= recipNorm;
// Auxiliary variables to avoid repeated arithmetic
_2q0 = 2.0f * q0;
_2q1 = 2.0f * q1;
_2q2 = 2.0f * q2;
_2q3 = 2.0f * q3;
_4q0 = 4.0f * q0;
_4q1 = 4.0f * q1;
_4q2 = 4.0f * q2;
_8q1 = 8.0f * q1;
_8q2 = 8.0f * q2;
q0q0 = q0 * q0;
q1q1 = q1 * q1;
q2q2 = q2 * q2;
q3q3 = q3 * q3;
// Gradient decent algorithm corrective step
s0 = _4q0 * q2q2 + _2q2 * ax + _4q0 * q1q1 - _2q1 * ay;
s1 = _4q1 * q3q3 - _2q3 * ax + 4.0f * q0q0 * q1 - _2q0 * ay - _4q1 + _8q1 * q1q1 + _8q1 * q2q2 + _4q1 * az;
s2 = 4.0f * q0q0 * q2 + _2q0 * ax + _4q2 * q3q3 - _2q3 * ay - _4q2 + _8q2 * q1q1 + _8q2 * q2q2 + _4q2 * az;
s3 = 4.0f * q1q1 * q3 - _2q1 * ax + 4.0f * q2q2 * q3 - _2q2 * ay;
recipNorm = invSqrt(s0 * s0 + s1 * s1 + s2 * s2 + s3 * s3); // normalise step magnitude
s0 *= recipNorm;
s1 *= recipNorm;
s2 *= recipNorm;
s3 *= recipNorm;
// Apply feedback step
qDot1 -= beta * s0;
qDot2 -= beta * s1;
qDot3 -= beta * s2;
qDot4 -= beta * s3;
}
sampleFreq = 1000.0f/period;
// Integrate rate of change of quaternion to yield quaternion
q0 += qDot1 * (1.0f / sampleFreq);
q1 += qDot2 * (1.0f / sampleFreq);
q2 += qDot3 * (1.0f / sampleFreq);
q3 += qDot4 * (1.0f / sampleFreq);
// Normalise quaternion
recipNorm = invSqrt(q0 * q0 + q1 * q1 + q2 * q2 + q3 * q3);
q0 *= recipNorm;
q1 *= recipNorm;
q2 *= recipNorm;
q3 *= recipNorm;
computeAngles();
}
float invSqrt(float x) {
float halfx = 0.5f * x;
float y = x;
long i = *(long*)&y;
i = 0x5f3759df - (i>>1);
y = *(float*)&i;
y = y * (1.5f - (halfx * y * y));
return y;
}
void computeAngles(void)
{
roll = atan2f(q0*q1 + q2*q3, 0.5f - q1*q1 - q2*q2) * 57.3f;
pitch = asinf(-2.0f * (q1*q3 - q0*q2))* 57.3f;
yaw = atan2f(q1*q2 + q0*q3, 0.5f - q2*q2 - q3*q3)* 57.3f;
tst_q0 = q0 * 100;
tst_q1 = q1 * 100;
tst_q2 = q2 * 100;
tst_q3 = q3 * 100;
tst_pitch = pitch * 100;
tst_roll = roll*100;
tst_yaw = yaw*100;
}
MadgwickAHRS.H
#ifndef MadgwickAHRS_h
#define MadgwickAHRS_h
#include "mpu6050.h"
extern volatile float pitch, roll, yaw; //pitch->绕Y轴旋转的角度 roll->绕X轴旋转的角度
extern short Acel[3]; //x、y、z的加速度,其实就是重力加速度
extern short Gyro[3]; //x、y、z轴的角速度
//period 该函数执行的间隔,单位是ms
void MadgwickAHRSupdateIMU(uint32_t period);
#endif
效果实现
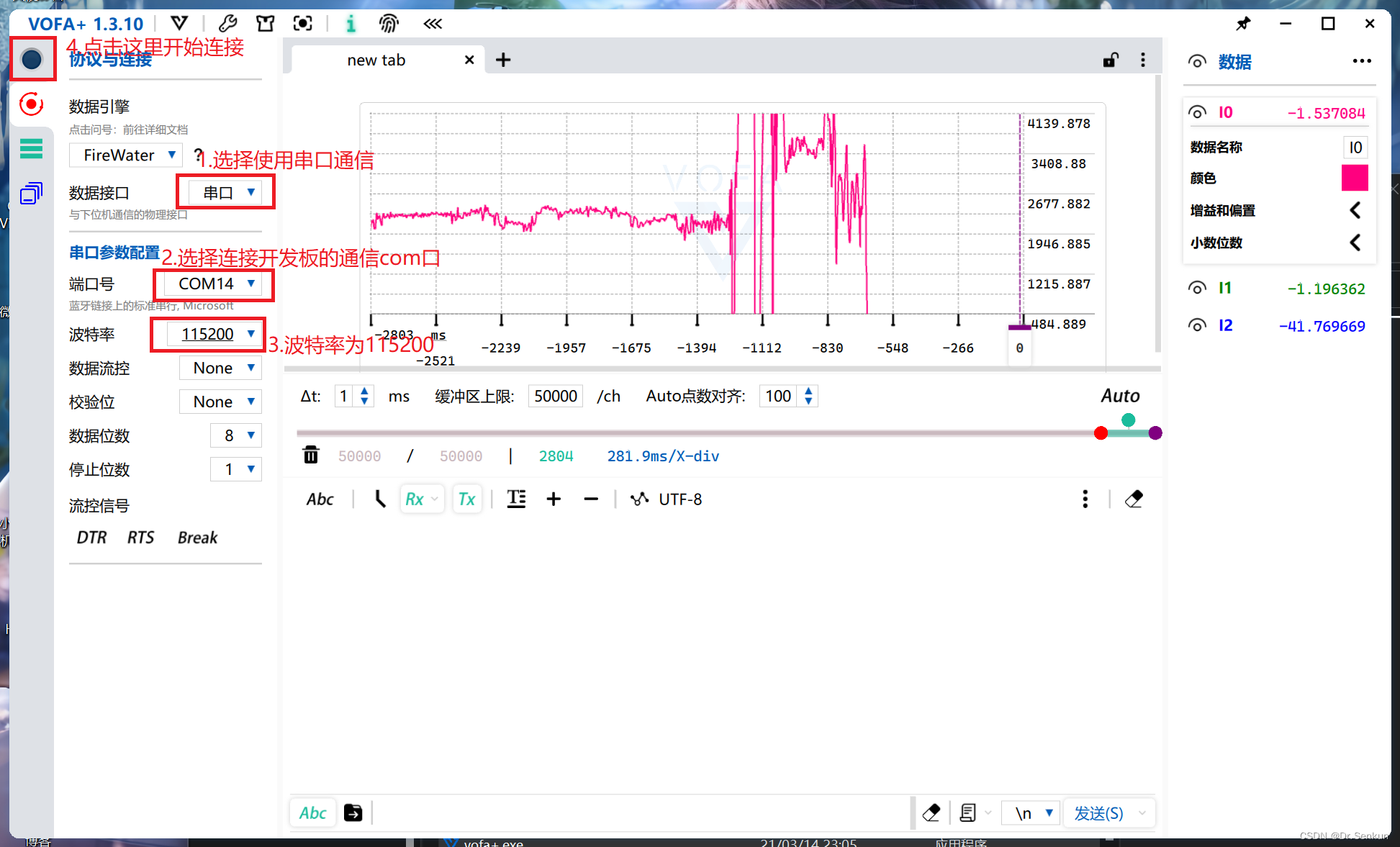
编写完成代码,下载至开发板后,即可通过"VOFA+"软件查看IMU6轴融合后得到的姿态角数据,超过指定位置后蜂鸣器发出警报。
vofa+软件使用方法
1.选择使用串口通信
2.选择连接开发板和本机的通信COM口(不知道COM口位置可去设备管理器查看)
3.波特率选择“115200”
4.点击蓝色圆形图标,开始连接
(以下图片是VOFA+软件主页面)
总结
以上代码是针对STM32F4系列微控制器的嵌入式C代码。它包括了一系列头文件的引用,定义了一些全局变量和中断服务函数。在main函数中,初始化了一些硬件设备如LED、MPU6050等,并进入一个主循环。主要功能是通过IMU6轴融合计算姿态角数据,并监测pitch角和roll角是否超过±60度,如果超过则触发蜂鸣器报警。定时通过串口打印姿态角数据。
(说实话其实很多代码的编写都是复制粘贴的,但学会看懂别人的代码和在此基础上进行调用和改写,培养编程逻辑思维就算是学有所悟了吧。)















 3626
3626











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









