






一.前期准备
进入Carla根目录下的Import文件夹

在Import文件夹下面新建一个文件夹 这里我取名为RoadA
进入新建的文件夹,创建json文件,json文件的名字与文件夹名字相同
再将从RoadRunner中导出的地图文件夹(map)放入新建的文件夹目录下
重点关注.fbx和.xodr文件

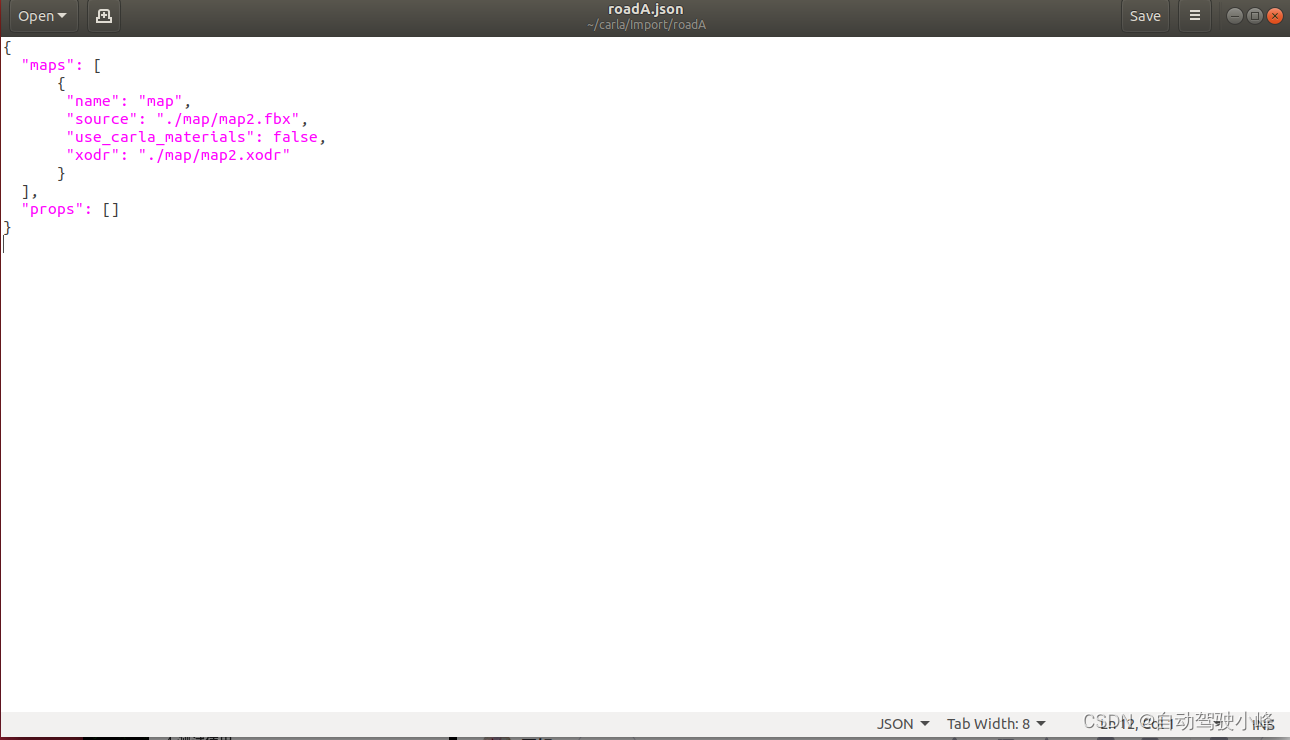
然后打开新建的json文件
gedit ./roadA.json
添加并修改如下代码
name为RoadRunner中导出的地图文件夹名字
source和xodr为从RoadRunner中导出的地图文件夹目录下fbx和xodr文件路径,注意路径的根目录是新建的文件夹,即json文件所在的目录
use_carla_materials指是否使用carla提供的纹理,这里我选择了false
{
"maps": [
{
"name": "map",
"source": "./map/map2.fbx",
"use_carla_materials": false,
"xodr": "./map/map2.xodr"
}
],
"props": []
}
到此前期准备就完成了。
二.编译
进入到carla的根目录 在控制台输入以下命令
make import
等待编译完成 等待时间较长
编译完成会在carla/Unreal/CarlaUE4/Content目录下生成和Import目录下导入地图文件夹名字相同的文件夹。文件结构如下
RoadA
│
└── Config
├── RoadA.json
└── Maps
├── map
└── Static
├── Road
├── RoadLine
├── Terrian
三.进入到carla的根目录 运行carla
make launch
打开后进入界面
选择 File -> Open Level
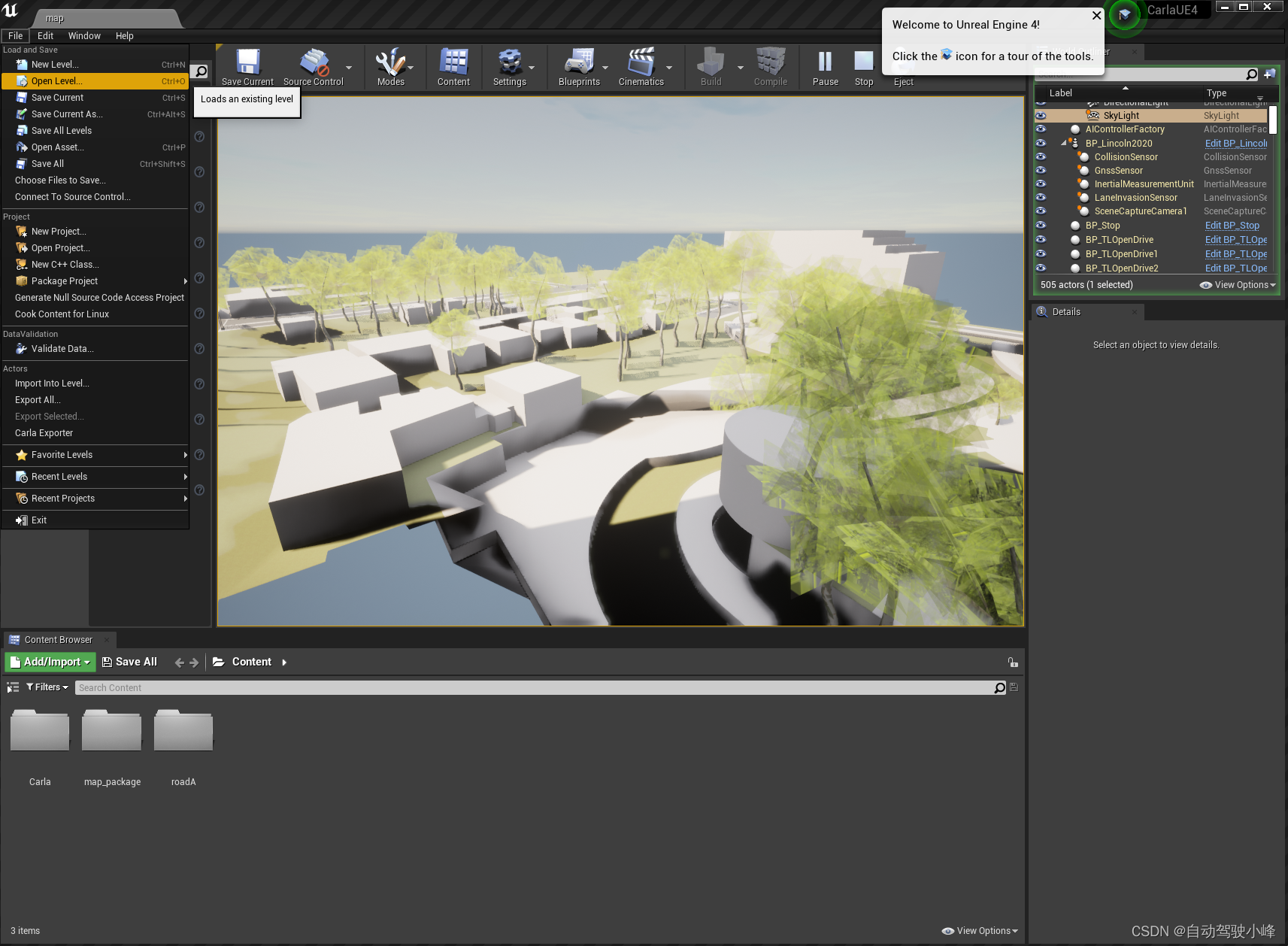
在弹出的界面中选择make import生成的文件夹 点击到Maps目录下的文件,如图所示
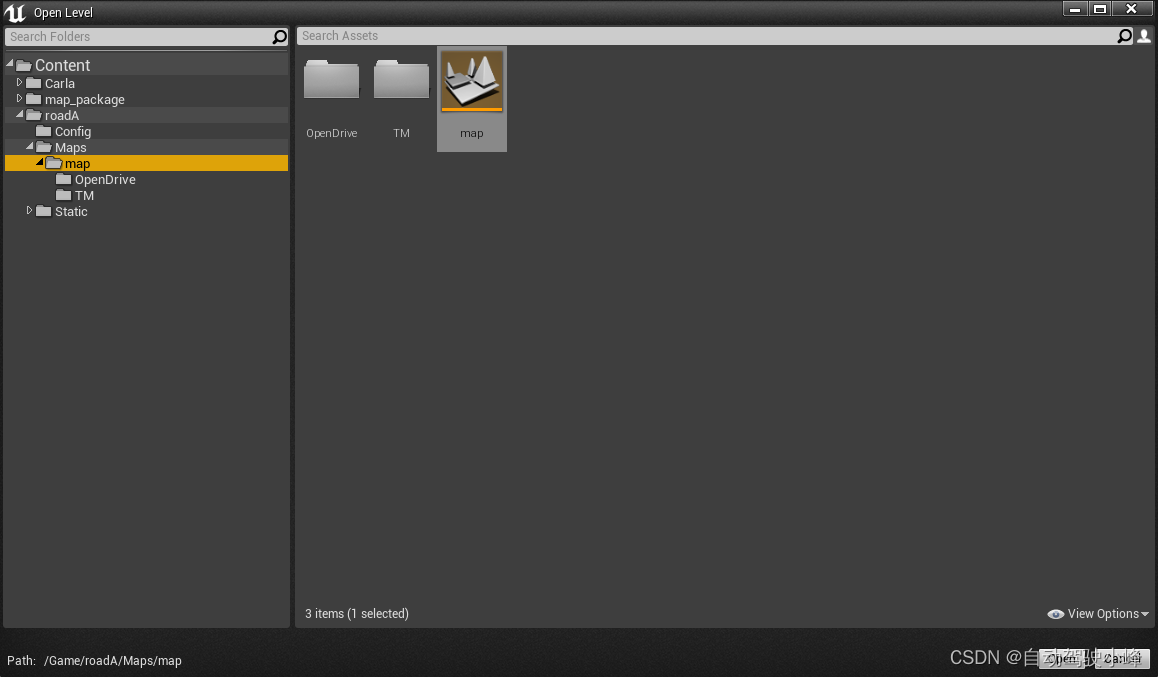
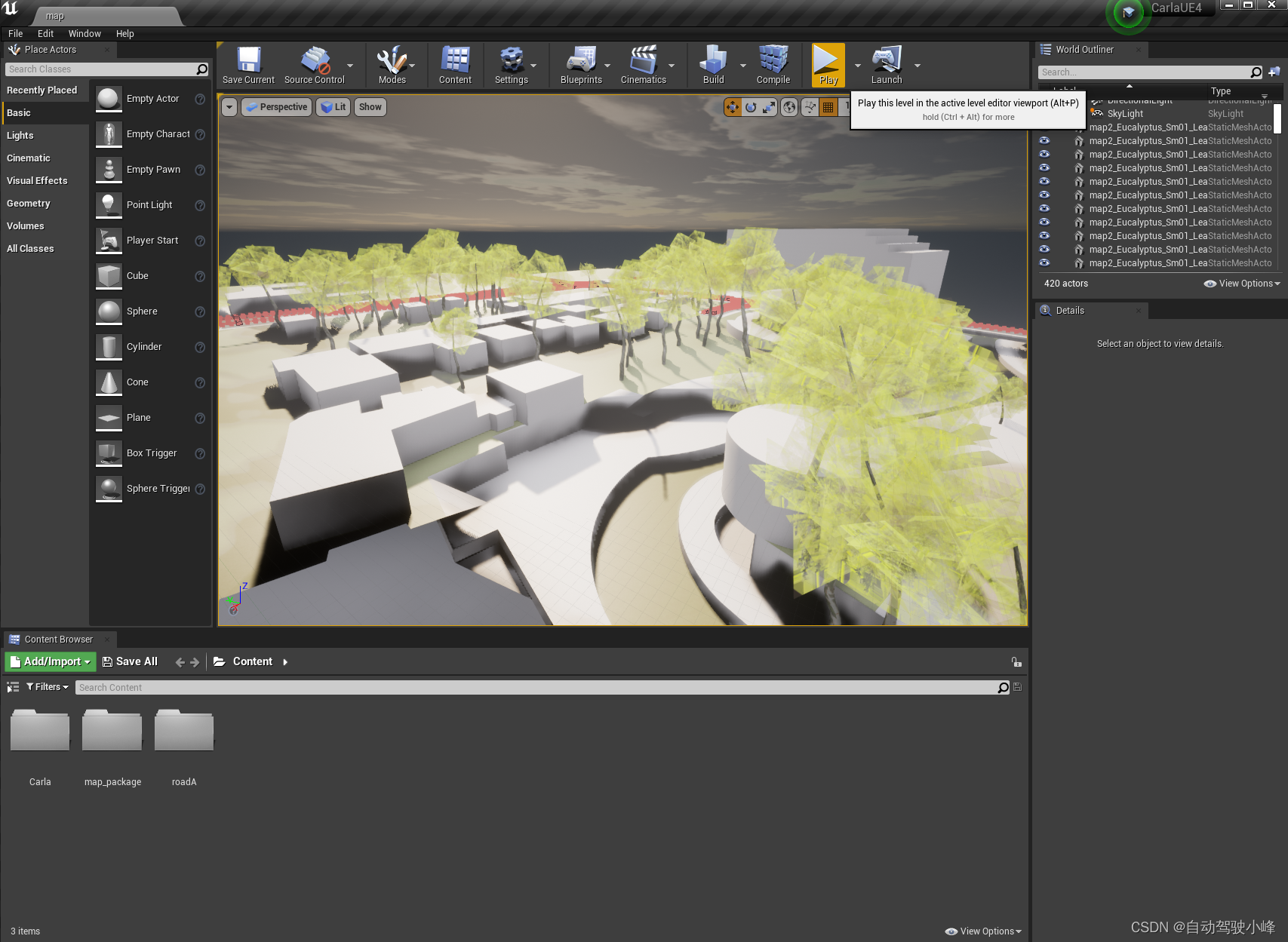
打开成功后就会出现在RoadRunner中的自建地图
4.测试使用
点击右上角的play,等待运行成功(命令行出现 登录XXXX)
然后进入到Carla/PythonAPI/examples目录下,打开终端,运行脚本
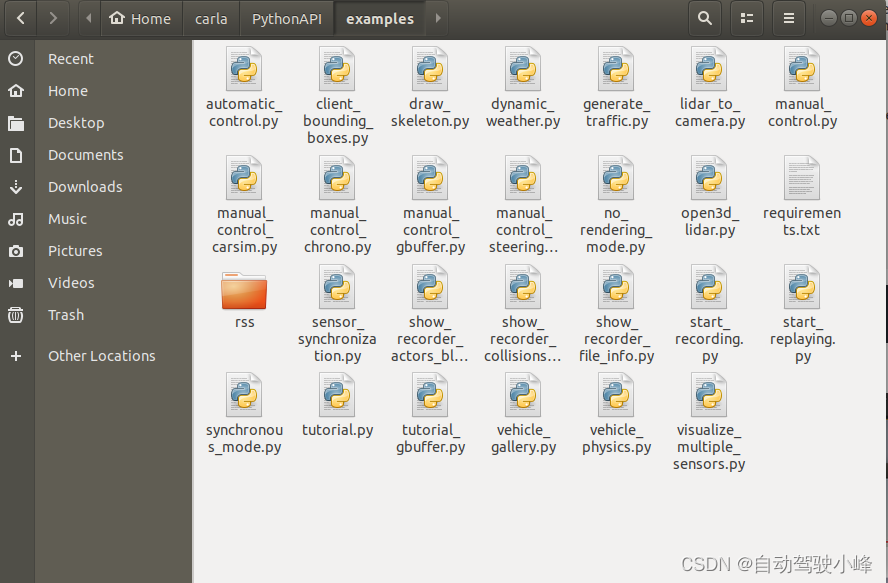
python3 manual_control.py
注:如若缺少模块,输入以下指令安装
pip3 install -r requirements.txt
即可实现手动驾驶
效果如下

至此地图导入完成。
参考链接:Ubuntu18.04使用Carla导入RoadRunner自建地图并使用


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









