






 该论文提出了TARCS,一种针对飞行自组网络(FANETs)的拓扑变化感知路由协议选择方案。TARCS包括周期性拓扑变化感知(PTCA)和自适应路由选择方案(ARCS)两部分,通过监测节点间的距离变化、方向变化、相对速率变化和邻居数量变化来度量拓扑变化程度(TCD)。根据TCD和预设阈值,网络动态调整使用路由协议,以优化包传递率、网络吞吐量、平均端到端时延和平均抖动等性能指标。实验结合了随机路径点模型、参考点群迁移模型和追踪模型,模拟网络拓扑的大变化,展示了TARCS的有效性。
该论文提出了TARCS,一种针对飞行自组网络(FANETs)的拓扑变化感知路由协议选择方案。TARCS包括周期性拓扑变化感知(PTCA)和自适应路由选择方案(ARCS)两部分,通过监测节点间的距离变化、方向变化、相对速率变化和邻居数量变化来度量拓扑变化程度(TCD)。根据TCD和预设阈值,网络动态调整使用路由协议,以优化包传递率、网络吞吐量、平均端到端时延和平均抖动等性能指标。实验结合了随机路径点模型、参考点群迁移模型和追踪模型,模拟网络拓扑的大变化,展示了TARCS的有效性。
论文题目:TARCS: A Topology Change Aware-Based Routing Protocol Choosing Scheme of FANETs
应用场景:
flying ad hoc networks (FANETs)飞行自组网络,reconnaissance/patrol, or target tracking.探测识别目标跟踪。
路由功能:
移动节点周期性地感知周围网络拓扑的变化,并根据感知结果确定当前的移动场景。
性能指标:
包传递率、网络吞吐量、平均端到端时延和平均抖动。
移动模型:
实验将随机路径点模型、参考点群迁移模型和追踪模型结合到链场景中,模拟了网络拓扑的大变化。
假设条件:
二维运动模型、传输范围是以节点为中心的圆、传输功率恒定、节点数量恒定。
论文贡献:
1.在飞行移动自组网中提出TDC度量来感知拓扑变化:
2.将度量结果与阈值进行比较,确定节点当前的运动方式,并调整网络中使用的路由协议。
路由方法:
(1)TARCS路由方案
拓扑变化感知路由协议选择方案(TARCS)包括两个步骤:周期性拓扑变化感知(PTCA)和自适应路由选择方案(ARCS)。
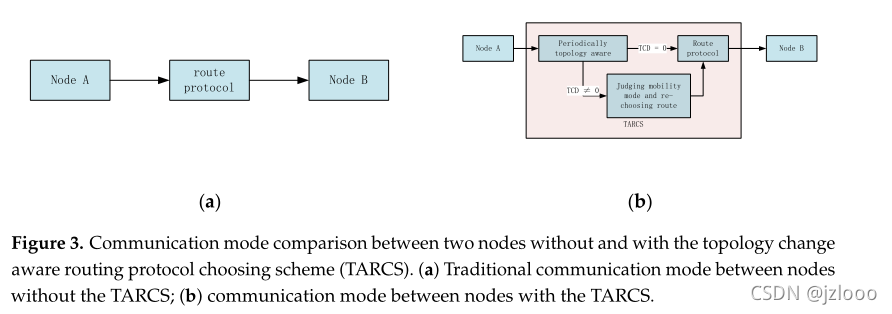
图3 比较两个节点在没有和有拓扑变化感知路由协议选择方案(TARCS)时的通信模式。(a)没有TARCS的节点之间的传统通信方式;(b)节点与TARCS之间的通信方式。
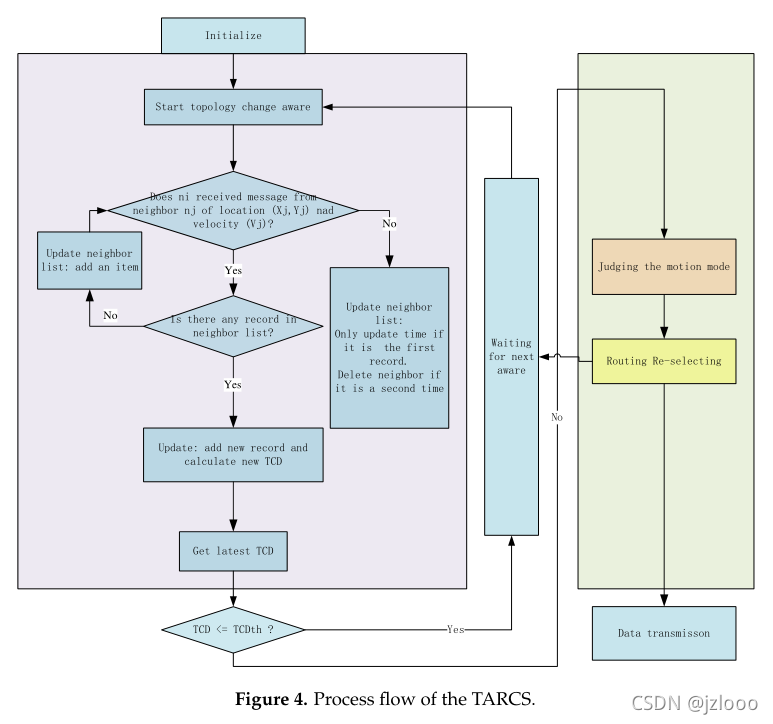

图4显示TARCS的基本工作流程。TARCS分为两个阶段。左侧区域表示周期性拓扑变化感知(PTCA),右侧区域表示自适应路由协议选择(ARCS)。
(2)Periodically Topology Change Aware (PTCA)周期性与拓扑变化感知
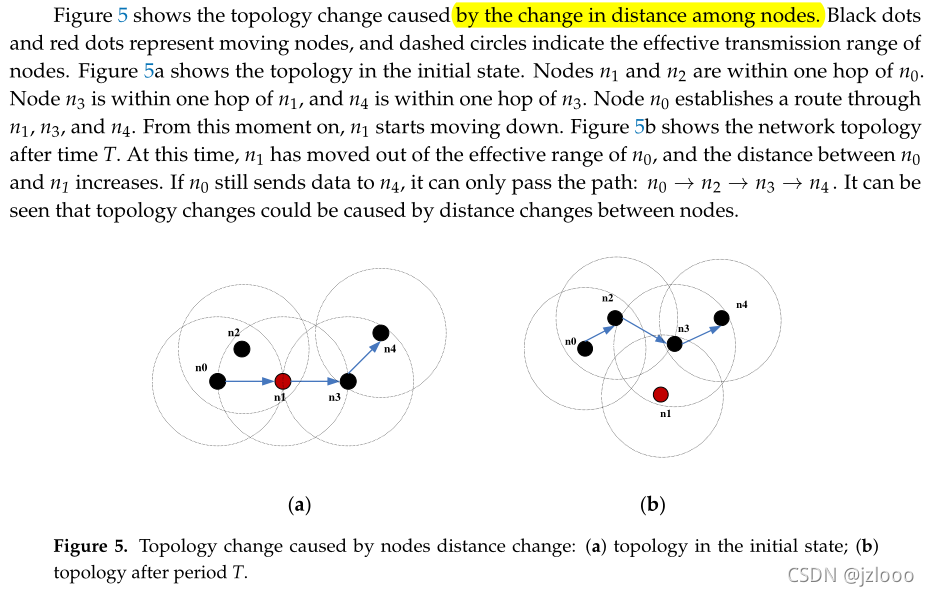
节点间距离变化
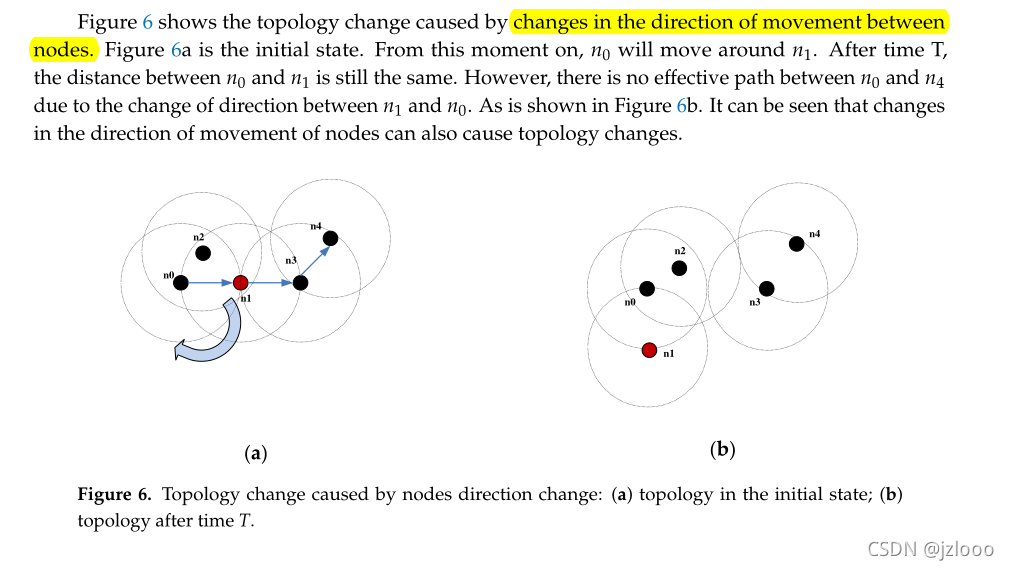
节点间运动方向的变化
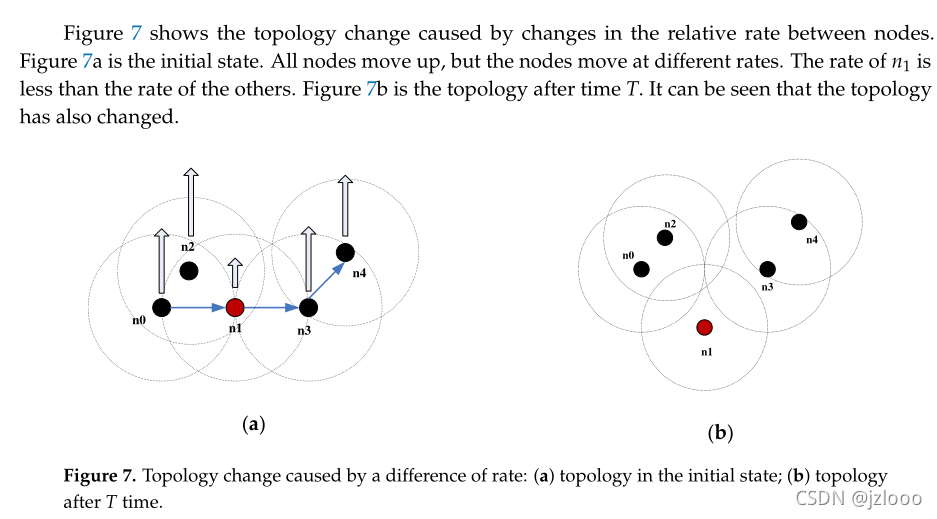
相对速率变化引起的拓扑变化。
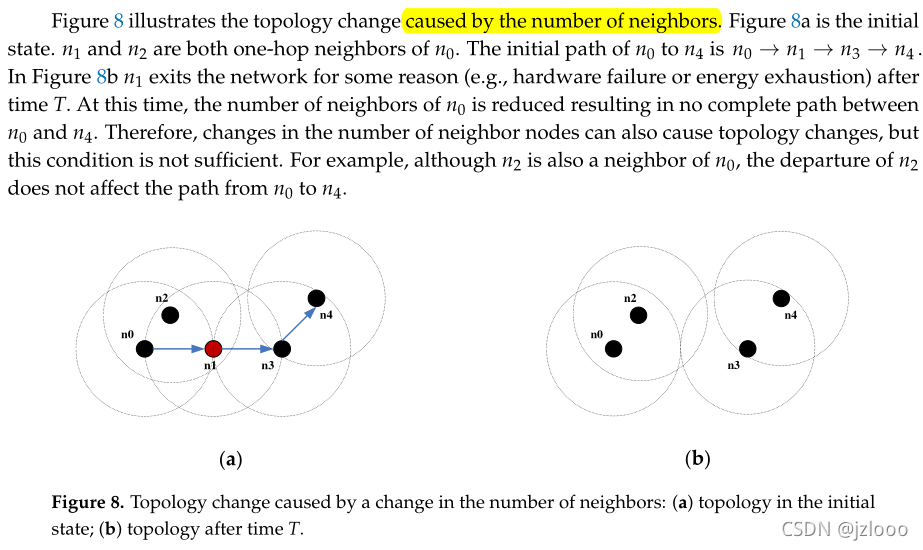
邻居数量引起的拓扑变化。
DCT度量
即相对位置、运动方向、相对速率和邻居节点的数量,都可能导致邻居节点之间的局部拓扑发生变化。因此,通过选择节点距离、运动方向和运动速率等参数,定义拓扑变化度(topology change degree, TCD)来度量邻居节点之间的拓扑变化。TCD的主要目的是准确量化相邻节点之间的拓扑变化,快速识别不同的运动模式。(说明选择这些指标是因为这些指标都会导致拓扑发生变化。)
1)公式1描述了节点ij之间在T时间段内的拓扑变化程度。

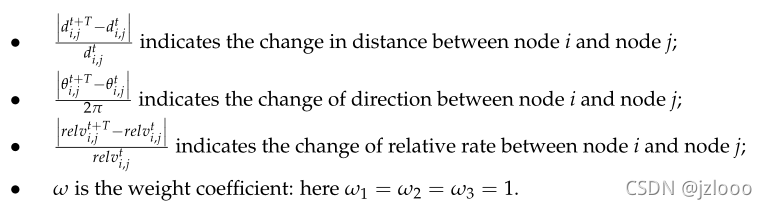
距离变化、方向变化、相对速度变化。
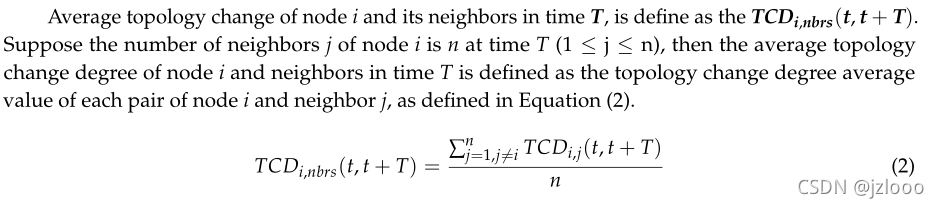
2)公式2描述了节点在T时间内拓扑变化的平均程度。
3)公式3描述了网络中整体的拓扑变化
Adaptive Routing Choosing Scheme (ARCS)自适应路由选择方案
根据TCD计算结果和阈值的比较,在两种路由模式间进行选择。
5.Clausen, T.; Jacquet, P . Optimized Link State Routing Protocol (OLSR), RFC 3626 (Experimental). Available online:https://www.ietf.org/rfc/rfc3626.txt.pdf(accessed on 9 October 2018)
23.NS-3 Documentation. Available online:https://www.nsnam.org(accessed on 10 October 2018).

















 8960
8960

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









