






伺服电机控制工程 伺服电机开发实例 modbus开发源码C# winform位置模式力矩模式
本工程源码编译环境是visual studio (最好采用2013以上版本),编写语言是C#
,winform工程。
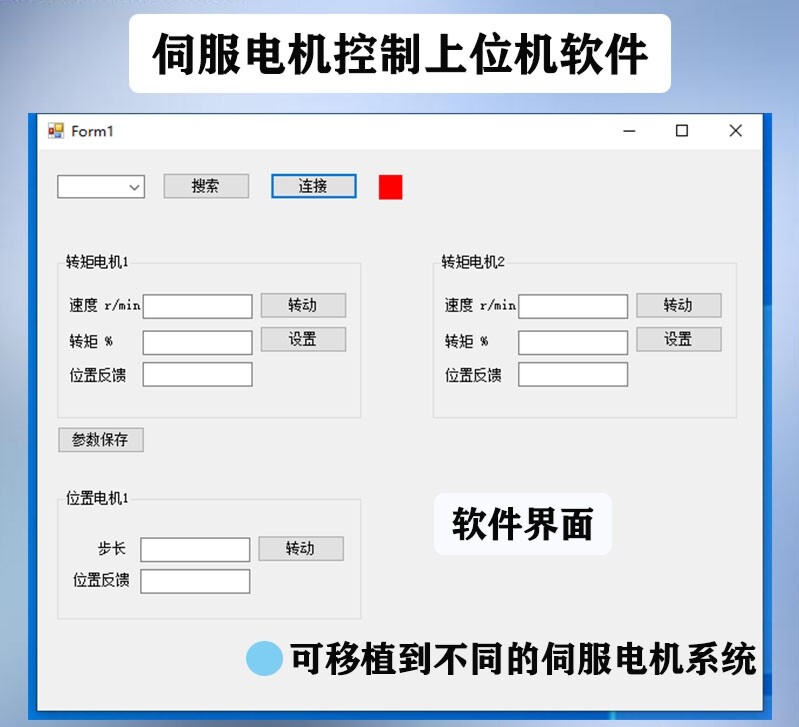
本工程可以实现电脑上位机与伺服电机进行modbus串口通信(232或485),从而实现电脑对伺服电机的控制,可以一对多进行操控,本实例支持同时控制两个转矩模式下运行的伺服电机,或一个位置模式下的伺服电机,稍作调整开发,可实现多路伺服电机在任意模式下的操控。
(控制之前需将伺服驱动器的参数设定好)
实例工程基于的硬件是亿丰伺服电机(一川电机),修改源码的modbus通信协议部分,可移植到不同的伺服电机系统,具有很好的参考价值,同时也可作为modbus通信开发的学习资源,可以应用到modbus通信的工业开发领域当中。
YID:4735644048613895
精致的活着
伺服电机控制工程是现代工业控制领域中非常重要的一个研究方向。在工业自动化领域中,伺服电机被广泛应用于各种机械设备和生产线的控制系统中。伺服电机控制工程可以通过控制电机的位置、速度和力矩等参数,实现对机械设备的高精度控制。
在本工程中,我们使用了C#编程语言和Modbus通信协议来实现对伺服电机的控制。本工程的开发环境是Visual Studio,使用了Winform框架进行界面设计和操作控制。通过调用相应的Modbus通信库,我们可以与伺服电机建立串口通信(RS232或RS485),从而实现电脑上位机对伺服电机的控制。
本实例的特点在于,它不仅支持单一伺服电机的控制,还可以同时控制两个转矩模式下运行的伺服电机,或者一个位置模式下的伺服电机。这意味着,我们可以根据具体需求进行调整和扩展,实现多路伺服电机在任意模式下的操控。
值得一提的是,本工程基于亿丰伺服电机(一川电机)的硬件平台进行开发。通过修改源码中的Modbus通信协议部分,我们可以将该实例移植到其他伺服电机系统中,具有很好的参考价值。同时,本工程也可以作为学习Modbus通信开发的优秀资源,可以应用到工业领域的Modbus通信开发中。
在实际应用中,为了确保伺服电机的正常运行,我们需要在控制之前对伺服驱动器的参数进行设定。这些参数包括位置、速度和力矩等,通过合理设定这些参数,可以使伺服电机运行在最佳状态。
总结一下,本文介绍了一个伺服电机控制工程实例,通过C#编程语言和Modbus通信协议实现了电脑对伺服电机的控制。这个实例具备一定的通用性,可以根据具体需求进行调整和扩展。同时,本文还介绍了如何修改源码中的通信协议部分,使得该实例可以适用于不同的伺服电机系统。希望这个实例对工程师们在伺服电机控制领域的研究和开发有所帮助。
相关的代码,程序地址如下:http://coupd.cn/644048613895.html
















 228
228











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









