






一、简介
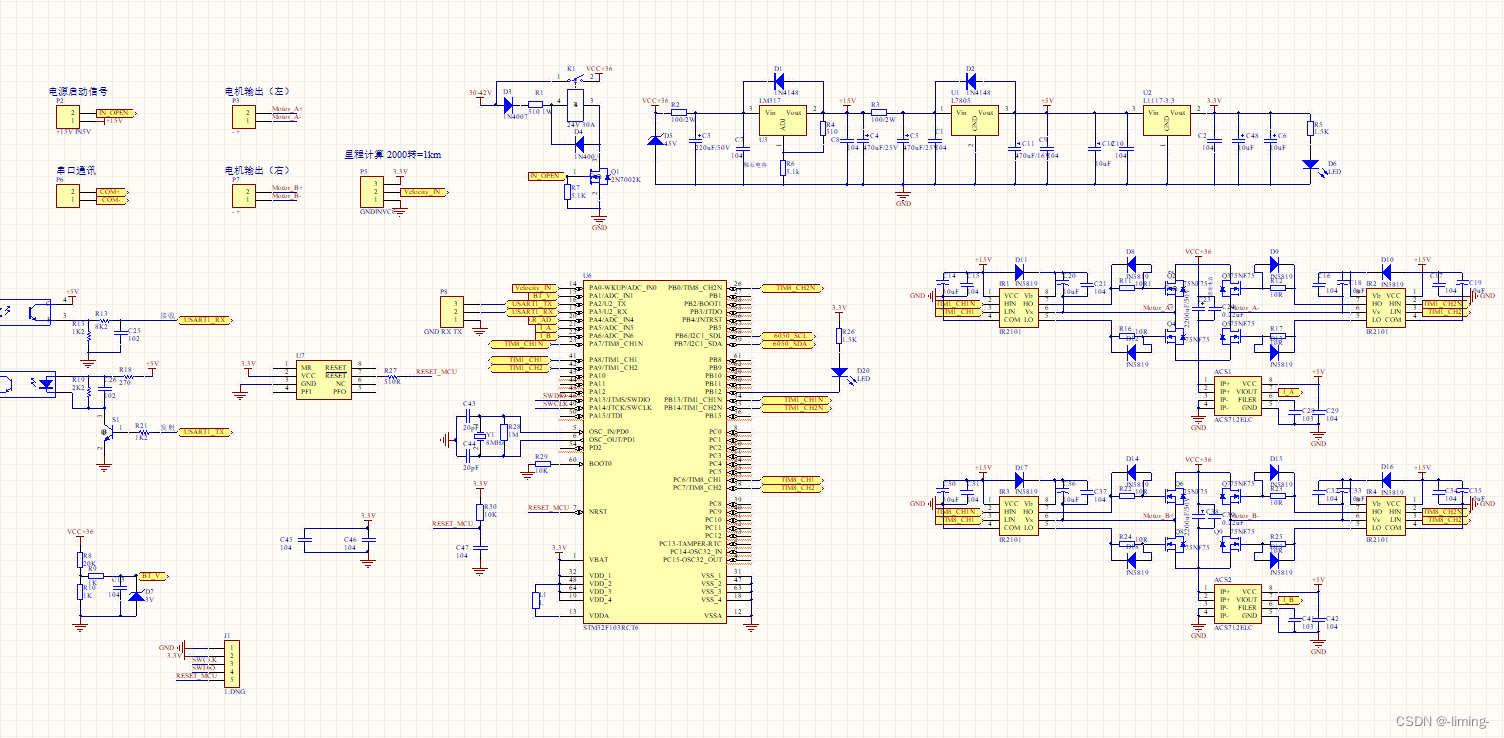
此系统主要由STM32、MPU6050传感器模块组成的平衡车。
二、原理图
三、部分代码
/*
* 硬件连接:------------------------
* | PA9 - USART1(Tx) |
* | PA10 - USART1(Rx) |
* ------------------------
* 库版本 :ST3.5.0
**********************************************************************************/
#include "usart1.h"
#include "misc.h"
#include
/*
* 函数名:USART1_Config
* 描述 :USART1 GPIO 配置,工作模式配置
* 输入 :无
* 输出 : 无
* 调用 :外部调用
*/
void USART1_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* config USART1 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* USART1 GPIO config */
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO;_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO;_InitStructure);
/* USART1 mode config */
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART;_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE);
}
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
/* Enable the USARTy Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC;_InitStructure);
}
/*发送字符*/
int fputc(int ch, FILE *f)
{
/* 将Printf内容发往串口 */
USART_SendData(USART1, (unsigned char) ch);
while (!(USART1->SR & USART_FLAG_TXE));
return (ch);
}
/*
* 函数名:itoa
* 描述 :将整形数据转换成字符串
* 输入 :-radix =10 表示10进制,其他结果为0
* -value 要转换的整形数
* -buf 转换后的字符串
* -radix = 10
* 输出 :无
* 返回 :无
* 调用 :被USART1_printf()调用
*/
static char *itoa(int value, char *string, int radix)
{
int i, d;
int flag = 0;
char *ptr = string;
/* This implementation only works for decimal numbers. */
if (radix != 10)
{
*ptr = 0;
return string;
}
if (!value)
{
*ptr++ = 0x30;
*ptr = 0;
return string;
}
/* if this is a negative value insert the minus sign. */
if (value < 0)
{
*ptr++ = '-';
/* Make the value positive. */
value *= -1;
}
for (i = 10000; i > 0; i /= 10)
{
d = value / i;
if (d || flag)
{
*ptr++ = (char)(d + 0x30);
value -= (d * i);
flag = 1;
}
}
/* Null terminate the string. */
*ptr = 0;
return string;
} /* NCL_Itoa */
/*
* 函数名:USART1_printf
* 描述 :格式化输出,类似于C库中的printf,但这里没有用到C库
* 输入 :-USARTx 串口通道,这里只用到了串口1,即USART1
* -Data 要发送到串口的内容的指针
* -... 其他参数
* 输出 :无
* 返回 :无
* 调用 :外部调用
* 典型应用USART1_printf( USART1, "\r\n this is a demo \r\n" );
* USART1_printf( USART1, "\r\n %d \r\n", i );
* USART1_printf( USART1, "\r\n %s \r\n", j );
*/
void USART1_printf(USART_TypeDef* USARTx, uint8_t *Data,...)
{
const char *s;
int d;
char buf[16];
va_list ap;
va_start(ap, Data);
while ( *Data != 0) // 判断是否到达字符串结束符
{
if ( *Data == 0x5c ) //'\'
{
switch ( *++Data )
{
case 'r': //回车符
USART_SendData(USARTx, 0x0d);
Data ++;
break;
case 'n': //换行符
USART_SendData(USARTx, 0x0a);
Data ++;
break;
default:
Data ++;
break;
}
}
else if ( *Data == '%')
{ //
switch ( *++Data )
{
case 's': //字符串
s = va_arg(ap, const char *);
for ( ; *s; s++)
{
USART_SendData(USARTx,*s);
while( USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET );
}
Data++;
break;
case 'd': //十进制
d = va_arg(ap, int);
itoa(d, buf, 10);
for (s = buf; *s; s++)
{
USART_SendData(USARTx,*s);
while( USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET );
}
Data++;
break;
default:
Data++;
break;
}
} /* end of else if */
else USART_SendData(USARTx, *Data++);
while( USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET );
}
}
/******************* (C) COPYRIGHT 2012 WildFire Team *****END OF FILE************/















 3119
3119











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









