






前言
像我这样很多学习驱动的同学都会想一个问题:学了这个能干嘛?学了那个能干嘛?
姑且找找网络上开源的项目,找找,看看,还是一脸懵。因为开源只提供源码和大致介绍下做什么和有什么。而面对于基础开发者的博客还是很少的。甚至有的博主只是放一些定义,丢几个结构体的注释就完结。我曾经就是通过查缺补漏才形成了一个完整的项目框架。
借此,我打算撰写一套驱动的开发流程,从硬件调试到驱动框架搭建,到系统调用验证。
因为AI的盛行,自动驾驶,人脸识别等应用都成了市场的领航者。而他们用到的最多的基础配件都是SOC和摄像头模块等,所以我后面将针对摄像头的开发流程撰写一整套系列教程。希望可以供小白参考学习,也期待大佬进行点评。
不说废话了,接下来请看我的展示。
在开始之前有必要说明下硬件环境:
- 主芯片:瑞芯微的rv1126
- 摄像头:ov5640
- 内核版本:Linux 4.19
市面大多数摄像头都是使用I2C进行配置和初始化的,这里的I2C有时也叫SCCB,不过基本时序差不多的,一般不做区分。
一、确定I2C硬件连接正确
- 硬件接线:先将摄像头的i2c接到主板上的对应I2C上,然后接上电源,我的OV5640模块是接5V和3.3V
- 使用i2c-tool工具查看摄像头的i2c地址,下面介绍有两种方式
第一种
- 命令行输入
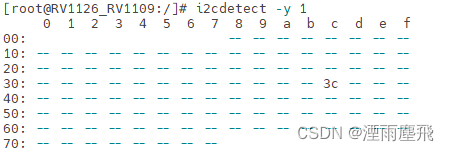
i2cdetect -y 1 //“1”代表I2C编号,一般一个SOC有很多I2C,如果接的是I2C0,这里就写0
得到如下结果,3c则是当前摄像头的i2c设备地址,这里先说明一下,如果3C这个地址被驱动使用,则显示UU
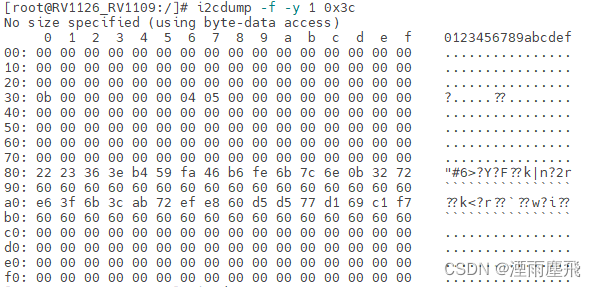
- 试试得到设备的各个寄存器的值,使用如下命令
i2cdump -f -y 1 0x3c
将得到如下结果
有这两个基本够用了,如果想了解更多,则可以看看如下文章
第二种
查看数据手册
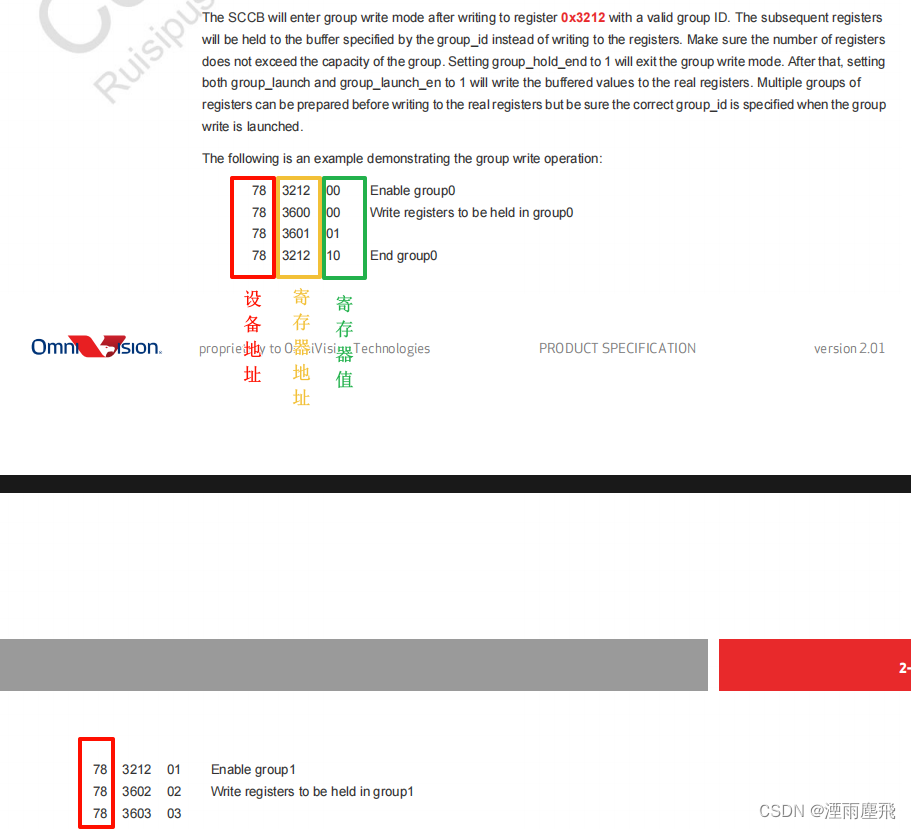
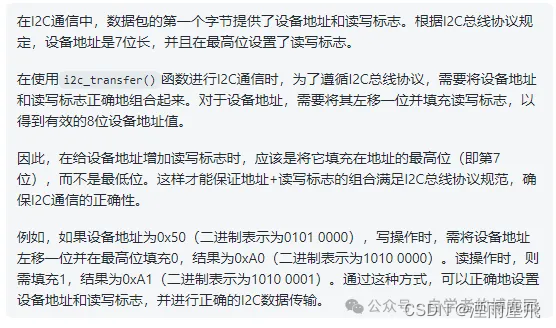
看到这里就有人有疑问了,为啥这里的设备地址是78,而第一种方法得到的是3C。这个疑问我有个文章写过 ( I2C简单实验之LT6911UXC读取ChipID),大家可以看下,我也贴在这
然后咱们就可以使用i2c-tool进行调试了。
二、I2C驱动基本框架的搭建
我曾在 I2C简单实验之LT6911UXC读取ChipID搭建过一个基本框架,这里再给大家分享一个比较简单的框架
static int ov5640_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
dev_info(dev,"\r\n this function is %s",__FUNCTION__);//封装好的打印api,其实就是经过一番操作最后调用printk函数
return 0;
}
static int ov5640_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
dev_info(dev,"\r\n this function is %s",__FUNCTION__);
return 0;
}
const struct i2c_device_id ov5640_id[]={
{"ov5640",0},
{}
};
MODULE_DEVICE_TABLE(i2c, ov5640_id);
static const struct of_device_id ov5640_of_match[] = {
{ .compatible = "ovti,ov5640" },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, ov5640_of_match);
static struct i2c_driver ov5640_i2c_driver = {
.driver = {
.of_match_table = of_match_ptr(ov5640_of_match),
.name = "ov5640",
},
.probe = ov5640_probe,
.remove = ov5640_remove,
.id_table = ov5640_id,
};
//这里是linux封装好的api,其中已经包含了init ,exit以及I2C设备的注册过程。
module_i2c_driver(ov5640_i2c_driver);
MODULE_DESCRIPTION("Omnivision OV5640 Camera Driver");
MODULE_AUTHOR("LY");
MODULE_LICENSE("GPL v2");
代码阅读顺序
按照以上的阅读顺序,有一点基础的同学肯定一目了然。这里就不做过多说明。
三、设备树插件的使用
设备树插件的原理和基本运用我在早期的文章已经写过:设备树插件_configfs学习笔记
这里贴一下使用方式,毕竟原理大致了解了就行了。使用之前先下载好驱动
链接: https://pan.baidu.com/s/1uuwqCwlZNkSLorEWTmkFrQ 提取码: 5dbv
加载方式跟普通驱动加载方式一样,俩个命令加载insmod和卸载rmmod
1.编写dts文件
/dts-v1/;
/plugin/;
/{
fragment@0{
target=<&i2c1>;
__overlay__{
ov5640:ov5640@3c{
status="okay";
compatible = "ovti,ov5640";
reg=<0x3c>;
};
};
};
2. 编译
- 编译的方式和编译设备树是一样的
sdk/kernel/scripts/dtc/dtc -I dts -O dtb overlay.dts -o overlay.dtbo
- 反编译为
sdk/kernel/scripts/dtc/dtc -I dtb -O dts overlay.dtbo -o overlay.dts
3. 使用
- 通过第三节加载相关驱动后,进入设备树插件相关configfs中
cd /sys/kernel/config/device-tree/overlays
- 创建一个内核对象
mkdir test
- 使用命令将dtbo写入到内核对象
cat /overlay.dtbo > /test/dtbo
- 使能dtbo
echo 1>/test/status
- 通过以下方式将能看到加载的节点
ls /proc/device-tree/i2c@ff510000/
如图所示

四、加载之前编写好的i2c驱动
- 加载驱动之前需要先编译成KO文件,可以使用如下模板
obj-m += <驱动的c文件名>.o
KDIR:=<内核路径>
PWD?=$(shell pwd)
all:
make -C $(KDIR) M=$(PWD) modules
clean:
rm -f *.ko *.o *.mod.o *.mod.c *.symvers *.order
编译命令 make
- 加载
insmod <驱动的C文件名>.KO

正确执行了probe函数,证明我们的驱动和设备树插件都使用的完全正确。

















 7517
7517











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











