







图像特征描述
图像特征是一幅图像区别于另一幅图像的最基本特征,是其可以作为欸标志性的属性。
图像特征分为两大类:
-
自然特征:图像本身都具有内在的图像特征(如图像的大小、颜色、轮廓、边缘、纹理等)
-
人为特征:便于对图像进行分析和处理,后期挖掘出来的人人定的图像特征,(如灰度直方图、矩特征、熵等)
-
图像的特征提取:对图像中的信息进行分析和处理,将其中不易受随机因素干扰的,具有标志性的信息作为该图像的特征信息提取出来。
-
优秀的图像特征应具有以下四个特性:
- 区别性:提取出来的图像特征应该具有很好的区别性。类别之间的特征值差别越大越好**,不同类别的特征值应该具有显著的差异**。比如网球和篮球,能很好地区分它们的特征就是它们的直径,直径大小的差异表现出大小明显的不同;
- 可靠性:具有相同类别的对象其特征值应该相似。比如不同成熟程度的苹果,其苹果颜色往往会不一样,青苹果和红苹果都是苹果,但是它们的颜色差别很大,所以选用颜色作为特征不是一个好的选择;
- 独立性:各个特征之间应该相互独立,彼此不相关联。若两个特征值所表征的基本上是某一对象的同一属性,则不应该同时使用这两个特征值,以免造成数据冗余,使计算复杂度大大增加;
- 数目小:表示图像特征的纹理特征向量维数不应过大。天兔星特征向量维数的增加会导致图像识别系统的复杂度大大增加。
图像特征的分类
当前的图像特征有很多种:主要有图像的点线面特征、纹理特征、颜色特征和统计特征等。
图像的点、线、图特征
- 点特征
-
点特征是图像中最基本的特征,它是指哪些灰度信号在二维方向上都有明显变换的点,这是一种比较简答的图像特征,也称为关键点等。
-
常见的点特征提取方法有:Forstner算子、SUSAN算子和SIFT算子。
-
从提取特征点的精度上看,Forstner算子精度最高,SIFT算子最低;从特征点提取速度上来看,速度最快的是SIFT算子,最慢的是SUSAN算子;
-
- 线特征
- 线特征主要是指图像中的直线以及各个直线间的相互关系,常用的线特征提取算子有梯度算子、差分算子、Roberts算子、Sobel算子以及Prewitt算子
- 面特征
- 图像的面特征是图像的重要特征之一,它把图像中较明显的局部区域信息视为特征。在实际的图像区域特征提取中通常采用图像分割算法提取图像面特征。
图像中的纹理形状特征
纹理就是由纹理基元按照某种确定性的规律或某种统计规律组成的一种图案。纹理可以用粗细度、对比度、方向性、规则性、凹凸性等来描述。常见的纹理特征分析方法主要有统计类方法、结构类方法和信号类方法:
统计类方法。利用图像中像素集合的灰度分布得到其相关的统计特征,根据该统计性质对纹理赋予特征。常见的方法有:灰度共生矩阵、各阶矩、自相关函数和形成长度统计等。
结构类方法:依照纹理图案中纹理基元和其排列规则来表示纹理特征。
信号类(频谱类)方法:此方法是先使用傅里叶变换转换到频率域中,然后再从频率成分的分布中获得对应的纹理特征。
统计类方法、结构类方法、信号类方法。
图象的颜色特征
常见的方法有颜色直方图、颜色矩、颜色聚合向量
图像的统计特征
-
图像的均值
-
图像的方差
图像的灰度值方差越大,其灰度分布范围就越广,图像包含的信息越大,能量就越大。
-
图像的标准差
图像的标准差反映了图像像素灰度相对于灰度均值的离散程度,也反映了图像对比度的强弱,标准差越大,意味着图像的灰度级分布越分散,图像的对比度越大。
-
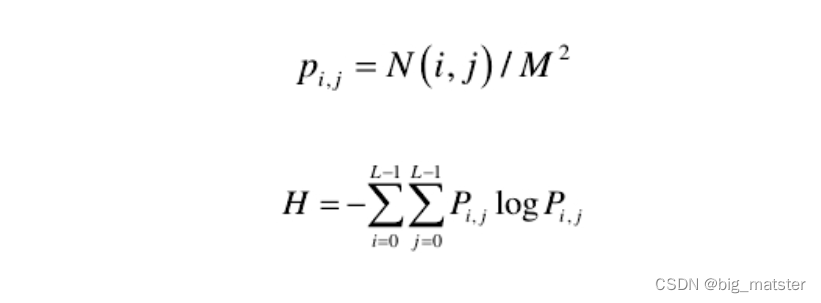
图像的熵
- 一维熵:图像的一维熵能很好的描述一幅图像中灰度分布据集特征中信息量的大小。
- 二维熵:能够很好的描述图像灰度分布的空间特征。
它将图像像素灰度值和图像的ing与灰度均值促成二元组 ( I , j ) (I,j) (I,j)
-
图像特征提取的评价
图像特征提取是图像识别的关键步骤,图像特征提取效果的好坏将直接影响到后续的图像处理效果。
1**) 图像特征向量应具有较强的表征能力**,且特征向量维数应该保持适中;
-
图像的特征向量应该是基于图像整体的**,特征向量的分布必须是均匀的,而不是只集中再图像的某一局部区域**;
-
特征向量应具有缩放、旋转、平移不变性,在同一幅图像经过旋转、缩放等一系列处理之后,从中提起的特征向量仍然能够实现精确的匹配;
4)图像特征提取应能够实现对多种类型图像提取特征,并且具有适应性强等优点。
5**)相同样本间的特征差应该越小越好**,不同样本之间的特征差则越大越好。
- 相同样本间的特征差应该越小越好,不同样本之间的特征差则越大越好。


















 798
798

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











