






本讲目标
●理解理解针孔相机的模型、内参与径向畸变参数。
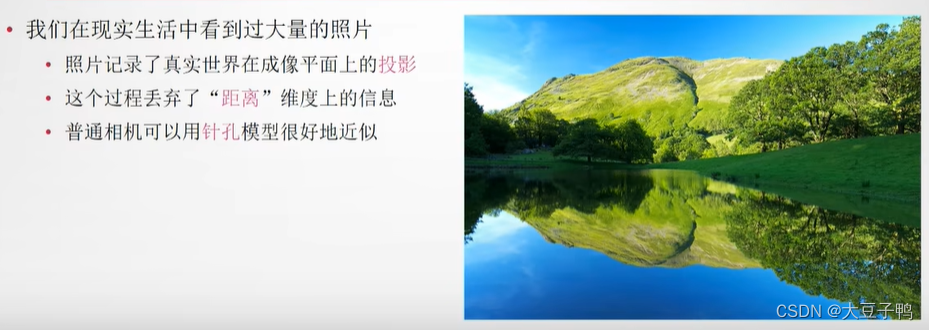
●理解一个空间点是如何投影到相机成像平面的。
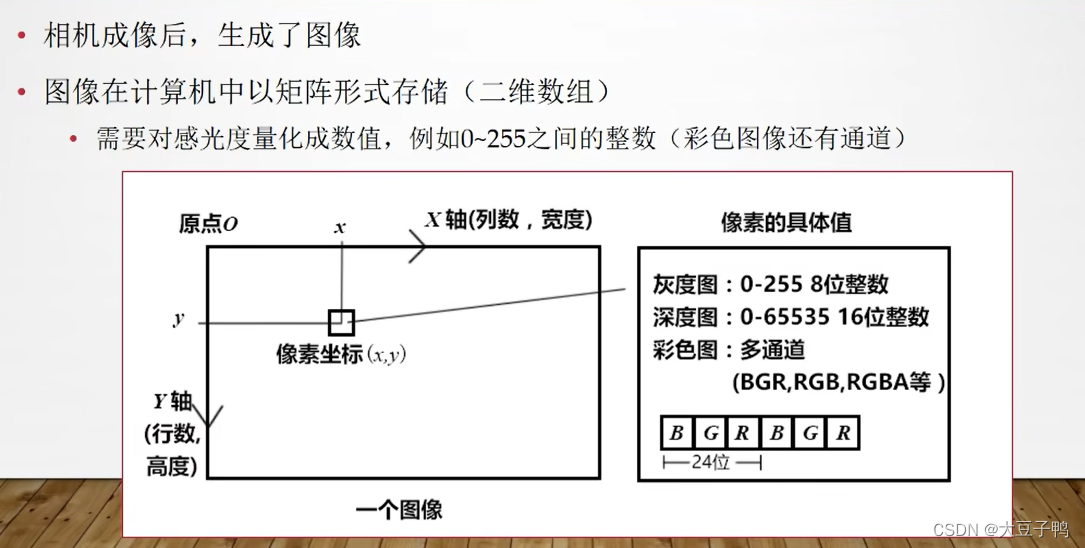
●掌握OpenCV的图像存储与表达方式。
●学会基本的摄像头标定方法。
上讲回顾
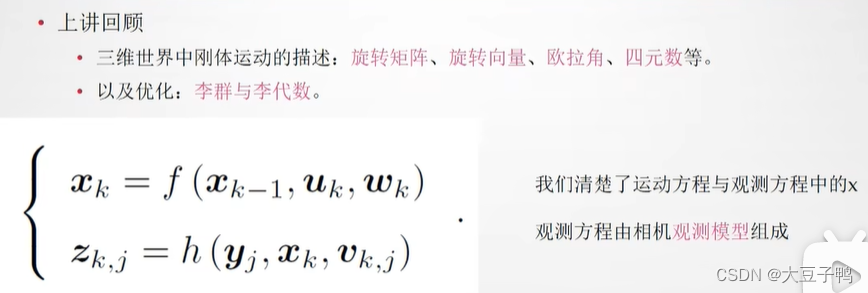
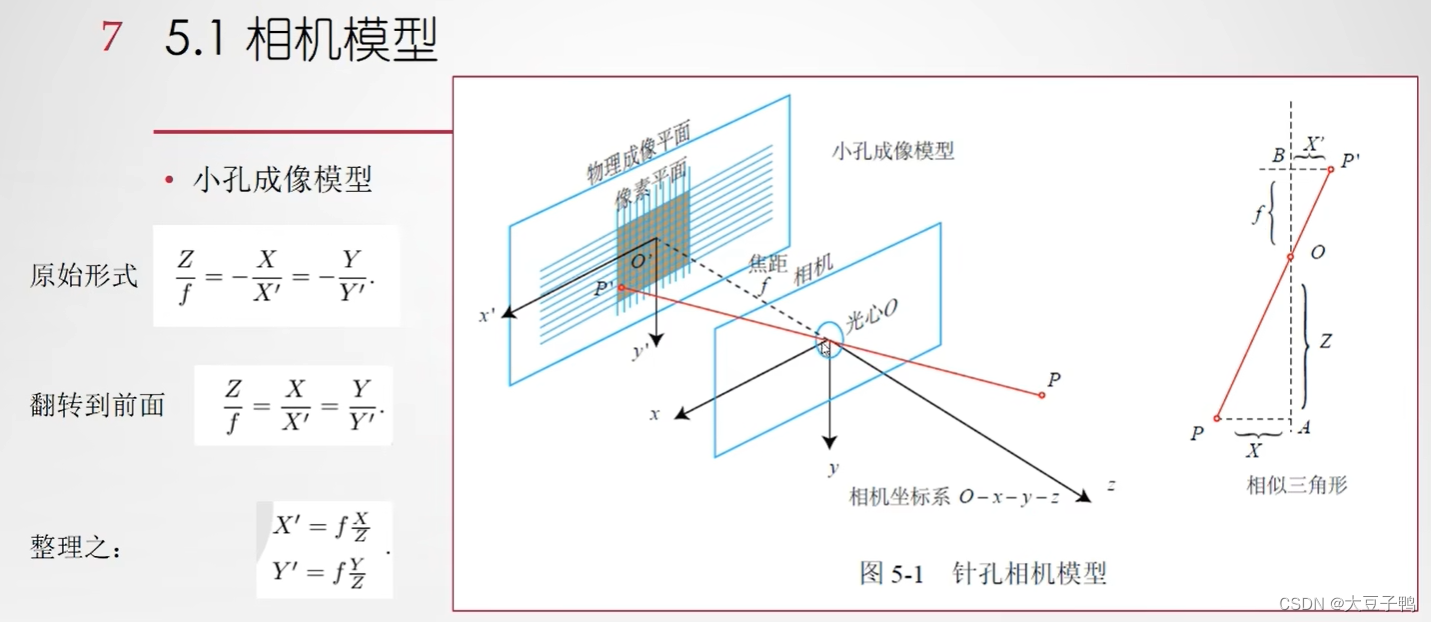
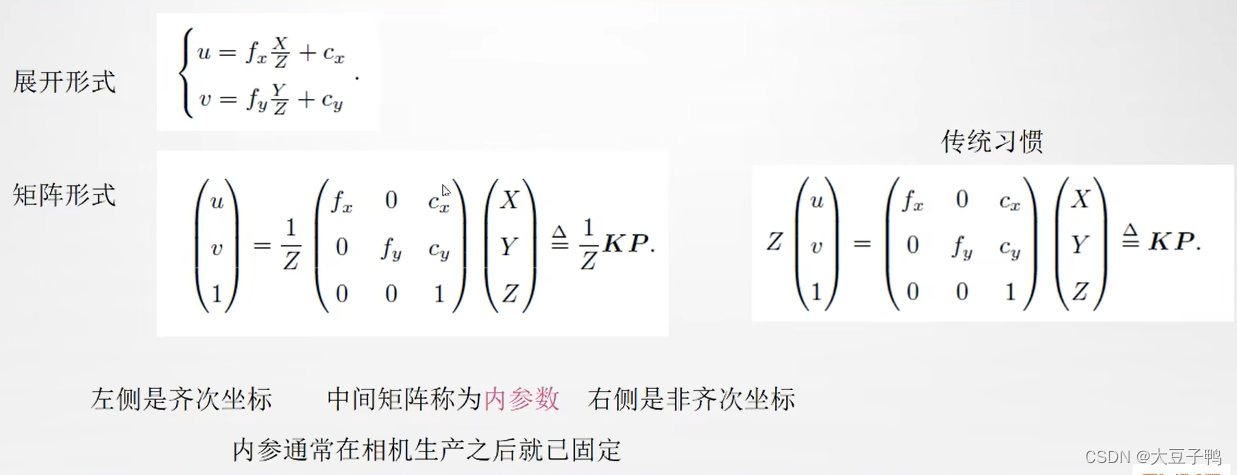
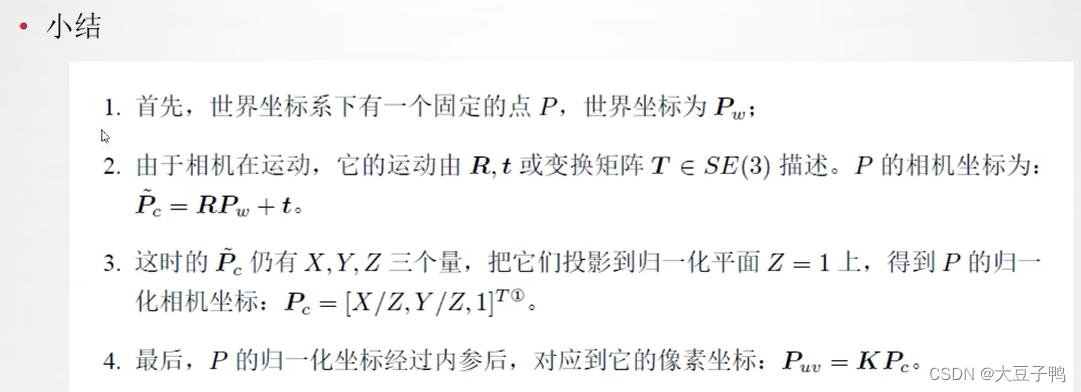
相机模型
小孔成像模型(单目模型)
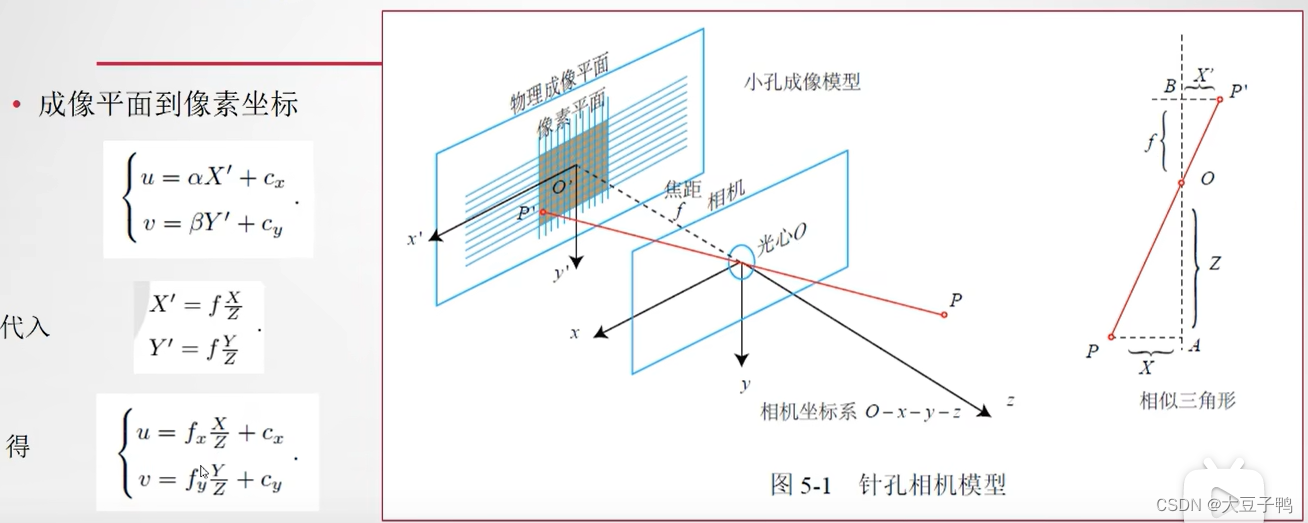
Z×像素坐标=K内参×P相机坐标
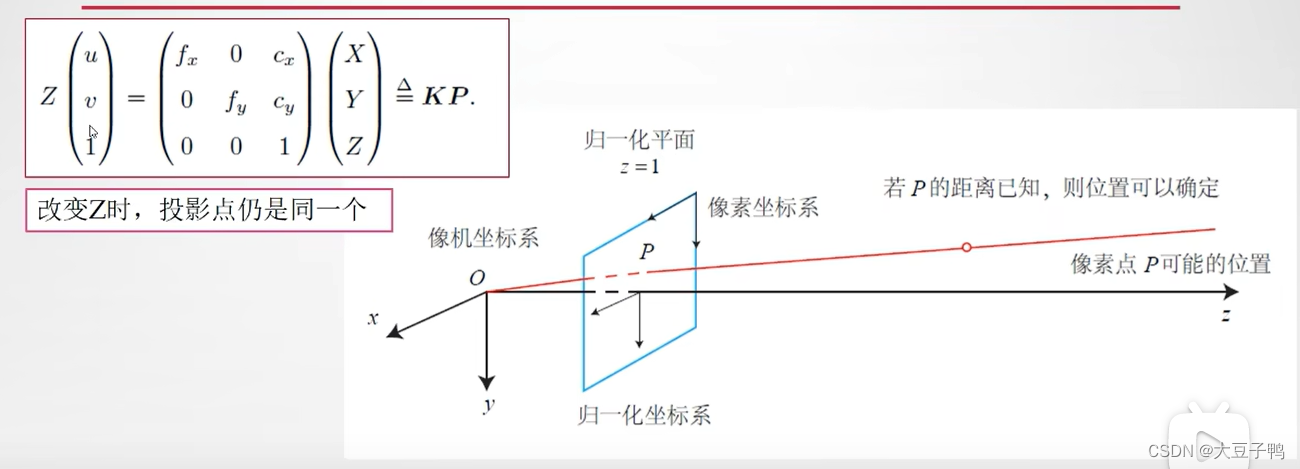
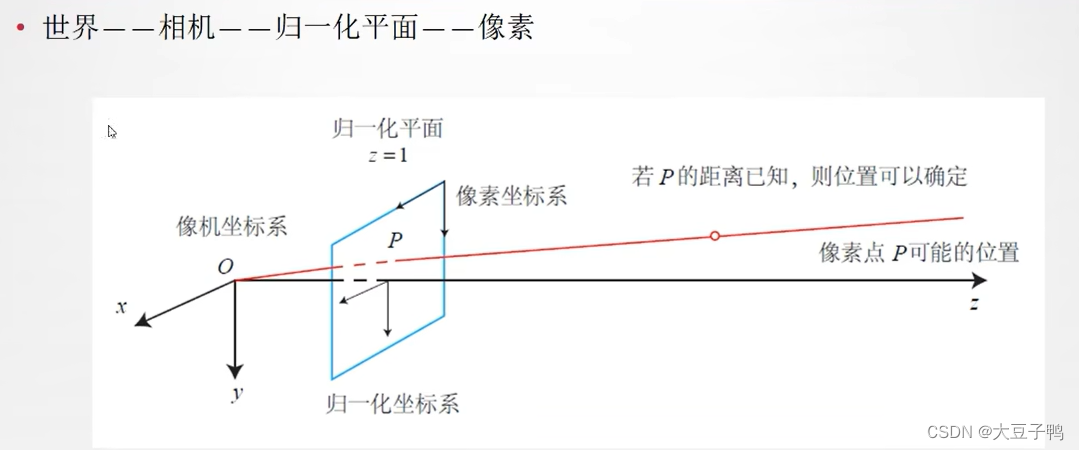
改变Z,仍然在红线上。
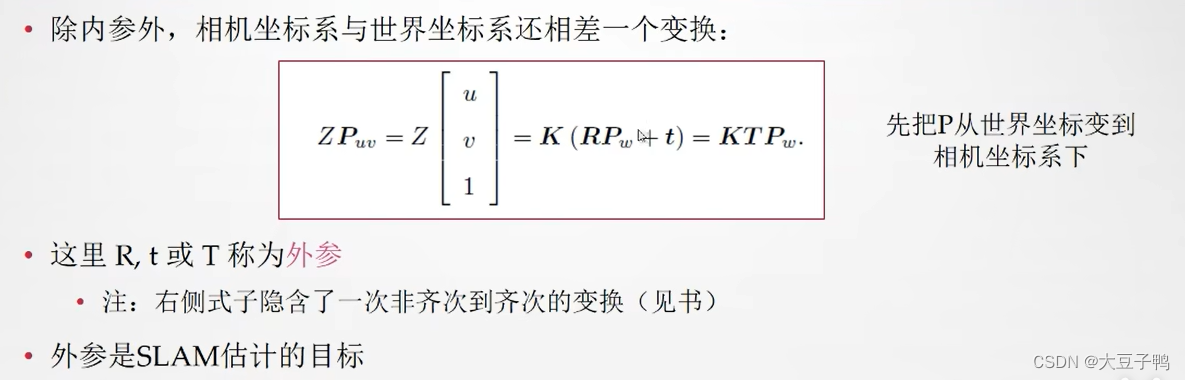
R旋转;t平移;T变换矩阵,4x4矩阵;Pw是4×1矩阵,需要把T×Pw归一化,求前面三个维,变成3×1维,再×K(3×3矩阵)。
畸变

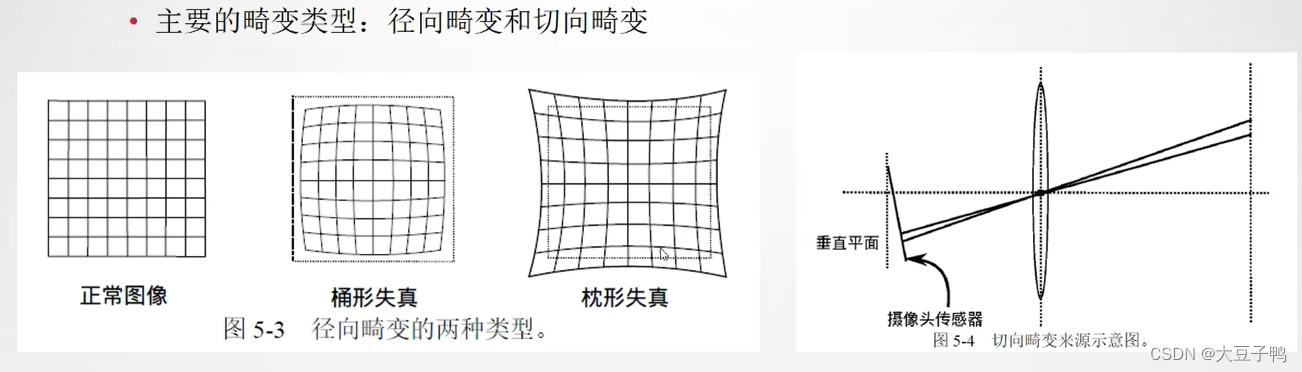
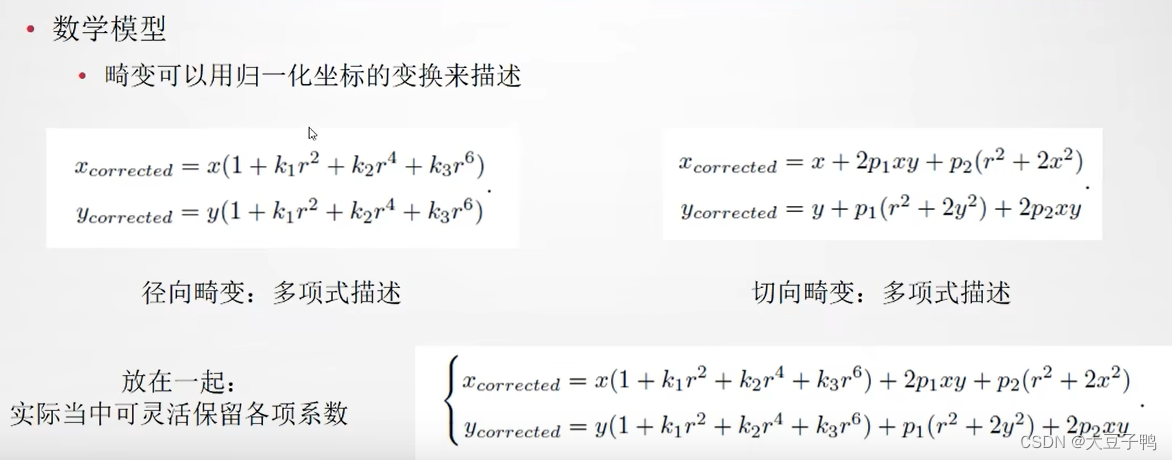
畸变发生在3-4之间,将归一化坐标Pc再进行一次畸变的变换,最后再成像,得到畸变像素坐标。
双目模型
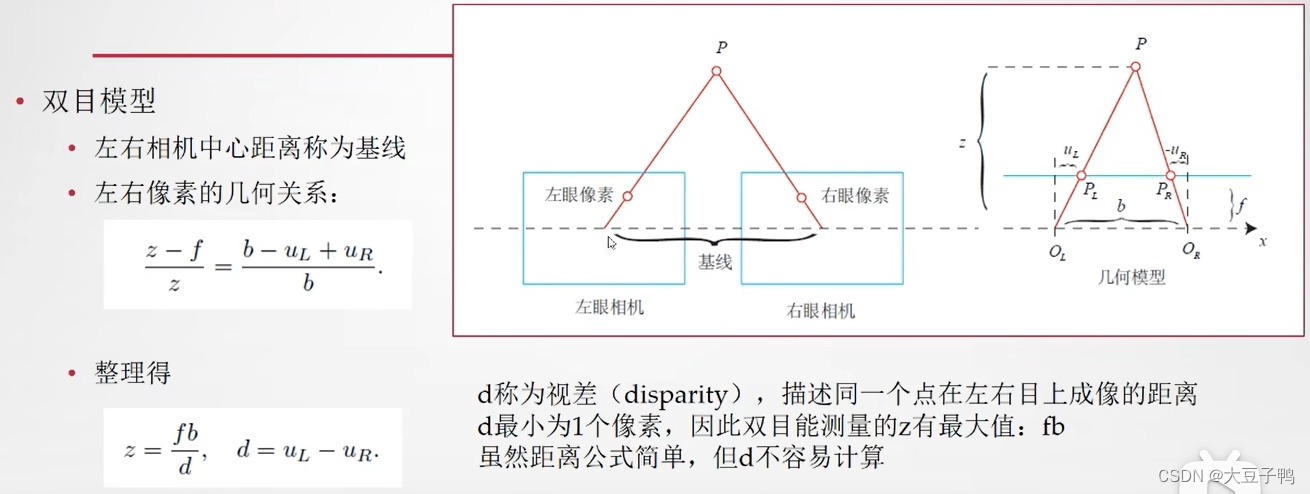
双目可以看成两个单目严格水平放置的相机。
基线越大的双目能够测量的双目距离越远。
RGB-D相机
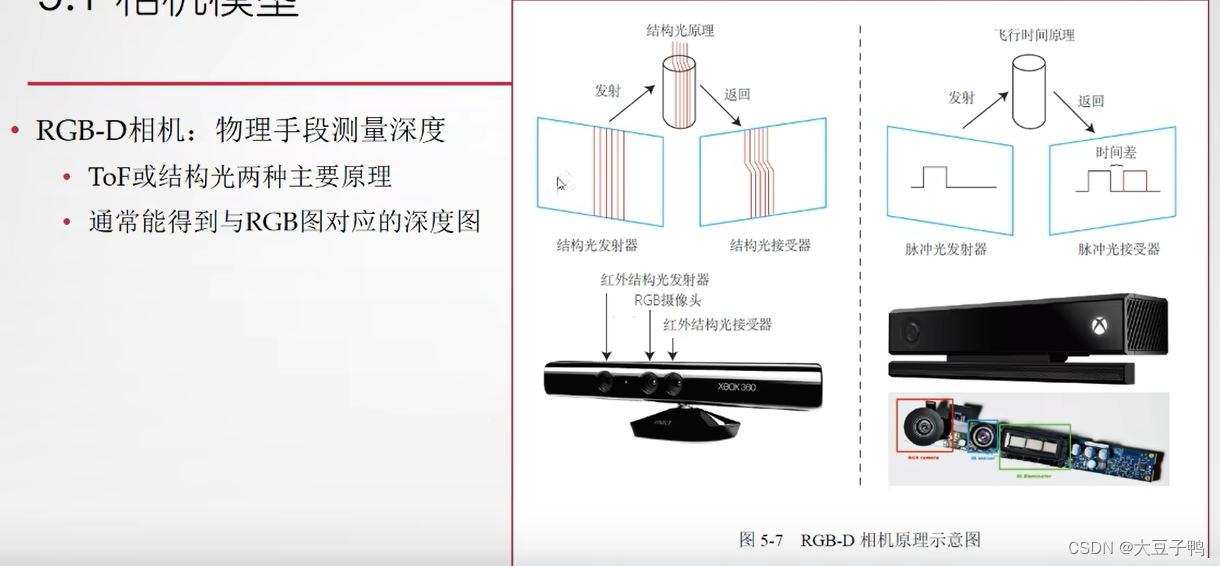
左:红外结构一个发射一个接受,再投给摄像头,然后会得到一个彩色图和一个深度图。
右:脉冲光相当于激光,发射出去,接受返回,得到时间差,时间差×光速=为物体距离的2倍。
缺点:投射材质和吸收光体材质测不到,例如:玻璃。受两个光源干扰,互相之间干扰和太阳光之间干扰。
1、ToF测距方法属于双向测距技术,它主要利用信号在两个异步收发机(Transceiver)(或被反射面)之间往返的飞行时间来测量节点间的距离。传统的测距技术分为双向测距技术和单向测距技术。在信号电平比较好调制或在非视距视线环境下,基于RSSI(Received Signal Strength Indication,接收的信号强度指示)测距方法估算的结果比较理想;在视距视线环境下,基于ToF距离估算方法能够弥补基于RSSI距离估算方法的不足。
2、TOF是面光源投射,将红外光均匀的投射在物体上,然后使用TOF相机捕捉红外光反射的时间差,通过计算得出景深信息,这样的好处在于投影成像距离较远,精度也不差。因为同样采用了主动光源,TOF在黑暗的环境下成像也不受影响。















 639
639











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









