







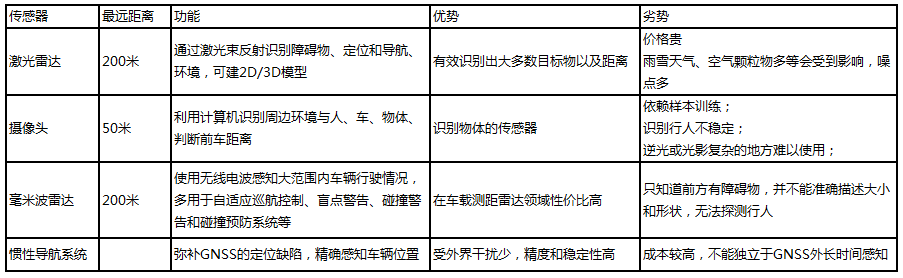
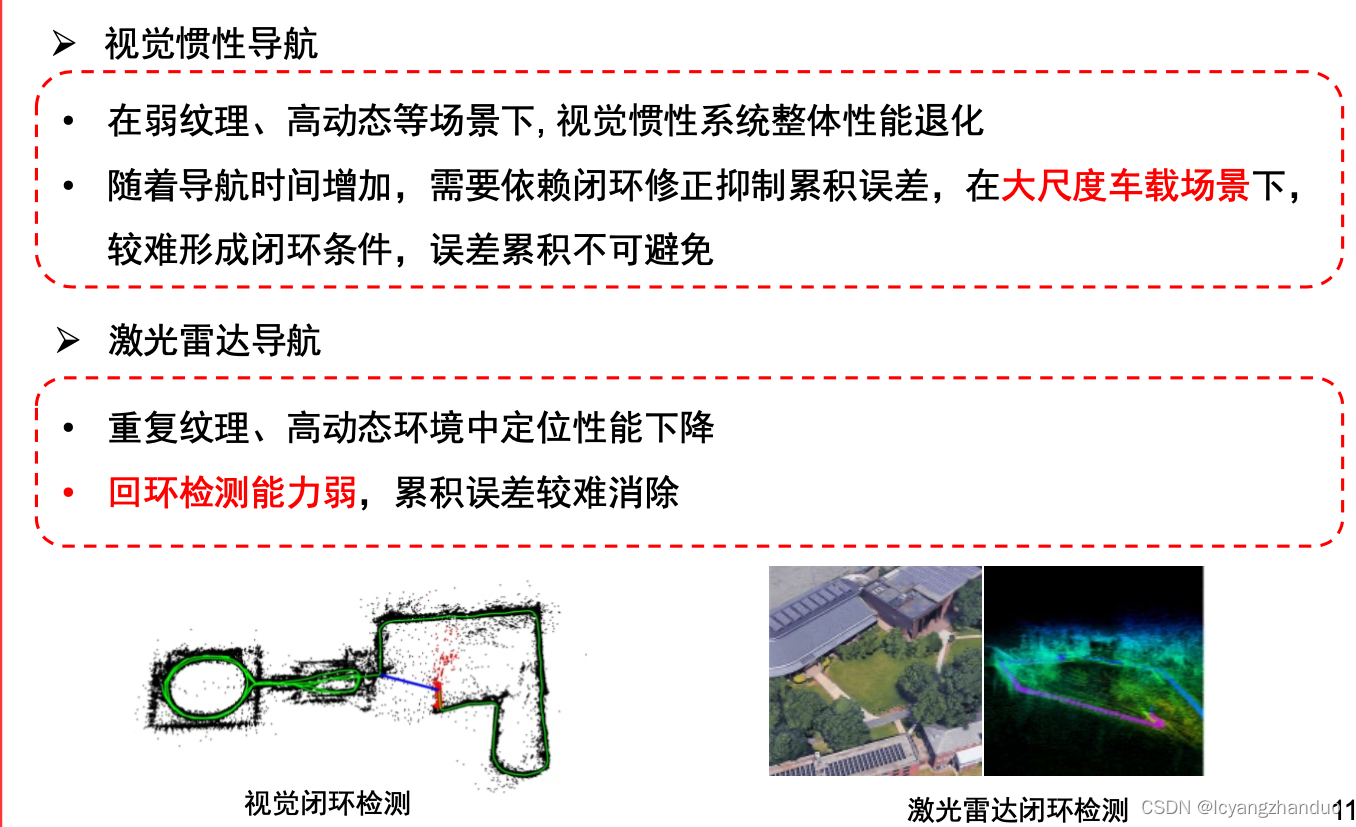
概述
从探测距离角度,毫米波雷达(长距)和激光雷达(远距离)均能探测到200左右的物体;摄像机虽然能看到更远的物体,但是远距离测量精度不准,单目估计在20米以外精度就开始下降,立体相机测量80米以外的物体精度也明显下降;超声波雷达用于近距离探测,探测距离通常在3米以内。
从测速功能角度,只有毫米波雷达能够通过多普勒频移直接获得物体速度;激光雷达,摄像机,超声波三种传感器均不能直接获得物体速度。
从抗干扰角度,摄像机作为被动传感器,依赖外部环境光,在夜间的探测能力较差;而毫米波雷达、超声波雷达、激光雷达均是有源传感器,不受白天/黑夜的影响,具有较好的鲁棒性。在雨雪、大雾、粉尘等天气状况下,毫米波雷达具有良好的穿透性,所以性能不受显著影响;而摄像机、激光雷达在探测性能上有不同程度的衰减。
传感器特性
| 光学摄像机 | 毫米波雷达 | 超声波雷达 | 激光雷达 | ||
| 探测距离 | 中 | 远 | 近 | 较远 | |
| 探测精度 | 低 | 中 | 较高 | 高 | |
| 抗干扰能力 | 受光照、雨雪、粉尘影响 | 全天候不受环境影响 | 受大风、温度影响 | 受雨雪、粉尘影响 | |
| 硬件成本 | 中低 | 中 | 低 | 高 |
survey paper
A Survey on Visual Map Localization Using LiDARs and Cameras
聊一聊基于激光雷达、Camera和跨模态数据的地图定位! (qq.com)
Anomaly Detection in Autonomous Driving: A Survey
最新综述!自动驾驶中Camera/Lidar/Radar如何识别异常目标和场景(CVPRW2022)
毫米波雷达
毫米波雷达是工作频率在 30 ~ 300 GHz( 波长为 1 ~ 10 mm) 的雷达。
功能:识别行驶过程中遇到的物体和障碍物,感知前方物体的距离、相对速度等信息,还可以同时简单识别出道路上的不同物体。它只能用于目标检测,因为输出分辨率不够高,无法进行目标识别。
和激光雷达相比,毫米波雷达的波长更大,在大气中传播时的衰减更小,受自然光和热辐射源的影响也小,因此毫米波雷达的环境适用性要明显优于激光雷达。
远距离雷达和中距离雷达是无人驾驶汽车的典型配置,实现探测目标方位及相对速度、保持车距以及紧急制动等功能。它们都属于毫米波雷达,工作频率为77 GHz。
根据测距原理可以将毫米波雷达分成脉冲测距雷达和连续波测距雷达,由于调频连续波技术成本低廉、技术成熟并且信号处理复杂度低,所以FWCW调制方式的毫米波雷达成为主流。
毫米波雷达分类及特点
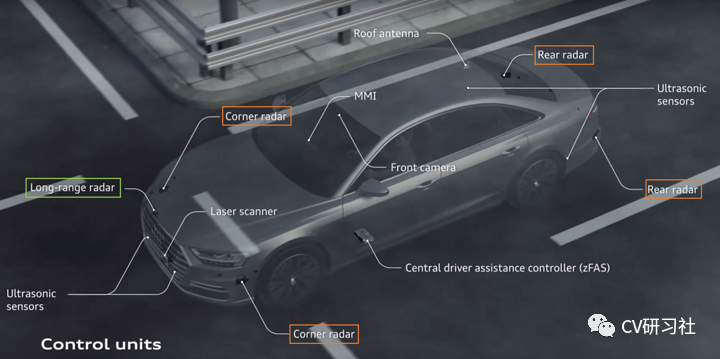
1. 近距离雷达(SRR):如上图所示,车辆四周的角雷达和安装于车辆后方的雷达,常用24GHz的毫米波探测40米以内的目标。
2. 远距离雷达(LRR):安装于车辆前保险杆上的前雷达常用77GHz的毫米波探测200米以内的目标并和摄像头的目标输出做后融合。
3. 79GHz的毫米波雷达频率更高,波长更短,分辨率更高,所以在远距离测距,测速上性能优于77GHz,并且由于体积较小,是将来发展趋势。
Image Radar(4D 毫米波雷达)
4D毫米波雷达是毫米波雷达的增强型,输出3D位置+径向速度,相对于传统的3D毫米波雷达(2D位置+速度)多了一维高度信息输出。
目前对4D毫米波雷达的使用有两种方法:
1. Doppler-ICP/images/dicp-poster.jpg at main · aevainc/Doppler-ICP · GitHub
类似激光雷达的用法,可以通过观测的速度去除动态物体的干扰,达到更好的建图定位效果。因为在实际道路上,运动车辆较多时,对激光雷达定位的影响特别大。但是我不认为可以达到文中提出的解决长直隧道定位的问题。
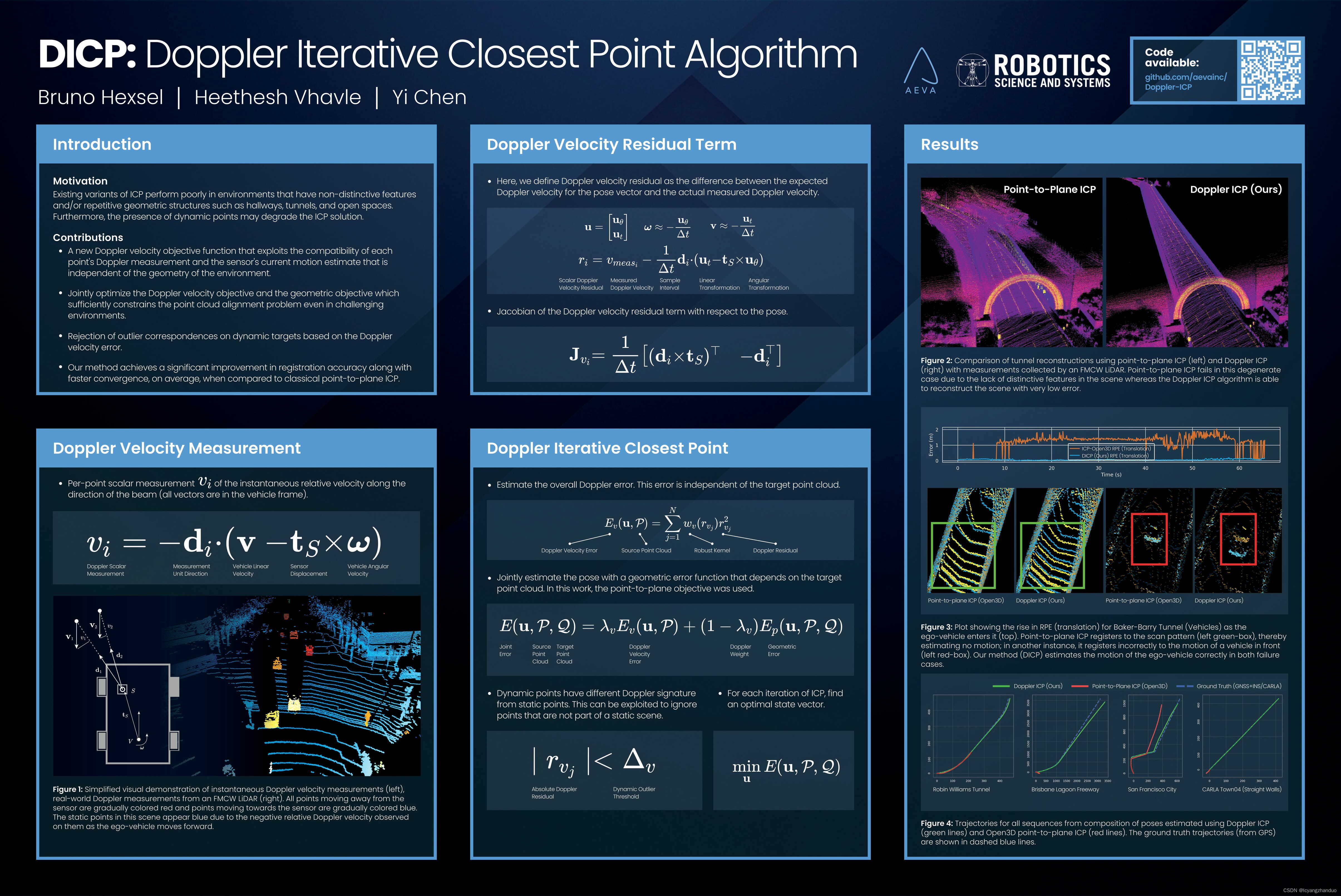
2. 使用4D毫米波雷达测得的相对静止物体的速度,作为速度的观测,提高推算的精度。
Need for Speed: Fast Correspondence-Free Lidar Odometry Using Doppler Velocity
Image Radar的反射特性不同于大部分的激光雷达,其在金属物体的反射强度会比较好,对于塑料以及水泥墙体的反射效果会差一些,此外,地面点一般也会当做杂波给滤除,这些都会造成Image Radar 的点云分布和激光雷达的点云表现不太相似。因此每帧可以使用的点云中点数量其实比较有限,所以才出现了第2种使用方法,索性抛弃所有的点云。
激光雷达
激光雷达是主动测量传感器,通过对外发射激光脉冲来进行物体检测和测距。根据测距方法的不同可以分为三角法测距、TOF法测距、相干法测距。
波长:大多数激光雷达采用905nm波长的光源,也有部分远距离探测雷达使用1550nm的波长。波长越长功率越大。
线数:激光雷达可以分为单线、16线、32线、64线、128线等,线数越多单位时间内采样的点数就越多,分辨率越高。
分辨率:包括水平角分辨率和垂直角分辨率,机械式激光雷达水平角分辨率一般在0.08°,垂直角分辨率根据线数的不同有较大的变化,16线激光雷达的垂直角分辨率为2°,呈现出的一帧点云较为稀疏。
视场角:包括水平视场角和垂直视场角,机械式激光雷达的水平视场角为360°,垂直视场角一般在20°~50°之间。固态激光雷达达不到全视野范围,水平视场角通常小于100°,垂直视场角通常在20°~70°之间。
扫描频率:采样频率在5~20Hz之间,一般默认10Hz,线数越多,每一帧的点数越多。
激光雷达通过点云来建立周边环境的 3D 模型,可以检测出包括车辆、行人、树木、路沿等细节。激光雷达用来描绘周围环境的几个主要参数,包括线数、点密度、水平垂直视角、检测距离、扫描频率、精度等。
除了位置和距离信息,激光雷达还提供返回所扫描物体的密度信息,后续算法据此可以判断扫描物体的反射率,再进行下一步处理。
| 毫米波雷达 | 激光雷达 | |
|---|---|---|
| 探测范围 | 强 | 强 |
| 探测精度 | 一般 | 强 |
| 目标分类 | 弱 | 强 |
| 测距能力 | 强 | 强 |
| 测速能力 | 强 | 弱 |
| 天气适应性 | 强 | 弱 |
| 温度稳定性 | 强 | 强 |
| 成本 | 适中 | 高 |
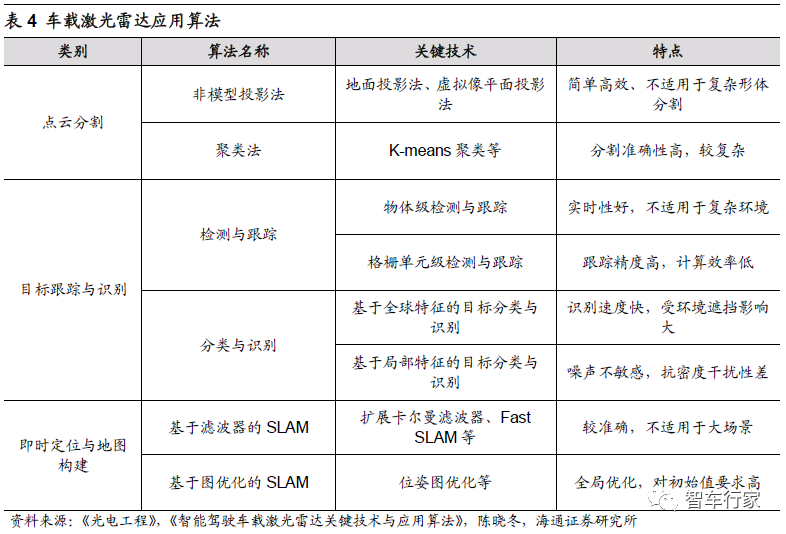
激光雷达分类
1. 机械式激光雷达通过底部旋转马达带动激光束进行360°扫描,每扫描一圈得到一帧激光点云数据,扫描一圈的时间称为一个扫描周期。通过测量激光信号的时间差和相位差来确定距离,并根据每条扫描线的角度和扫描旋转角度构建极坐标关系。
2. 混合固态激光雷达将机械式的外部旋转元器件做到了设备内部,比如MEMS技术直接在硅基芯片上集成体积十分精巧的微型扫描镜,并通过 MEMS 扫描镜来反射激光器的光线,从而实现微米级的运动扫描。
3. 固态激光雷达比如相阵控技术通过调节相位偏移来改变激光束的发射方向,从而实现整个平面的扫描。其原理是相控阵发射器由若干发射接收单元组成一个矩形阵列,通过改变阵列中不同单元发射光线的相位差,可以达到调节射出波角度和方向的目的。
摄像头
摄像头属于被动触发式传感器,被摄物体反射光线,传播到镜头,经镜头聚焦到CCD/CMOS芯片上,CCD/CMOS根据光的强弱积聚相应的电荷,经周期性放电,产生表示一幅幅画面的电信号,经过预中放电路放大、AGC自动增益控制,经模数转换由图像处理芯片处理成数字信号。
其中感光元器件一般分为CCD和CMOS两种:CCD的灵敏度高,噪声低,成像质量好,具有低功耗的特点,但是制作工艺复杂,成本高,应用在工业相机中居多;CMOS价格便宜,性价比很高,应用在消费电子中居多。
摄像头分类及特点
1. 传统的单目做前视感知一般FOV较小,景深会更远,能够探测远距离障碍物,比如mobileye早期产品采用52°的镜头,当然现在主推的是100°摄像头能够感知更广的范围。
2. 双目相机利用视差原理计算深度,通过两幅图像因为相机视角不同带来的图片差异构成视差。双目立体视觉在测距精度上要比单目做深度估计准确很多。
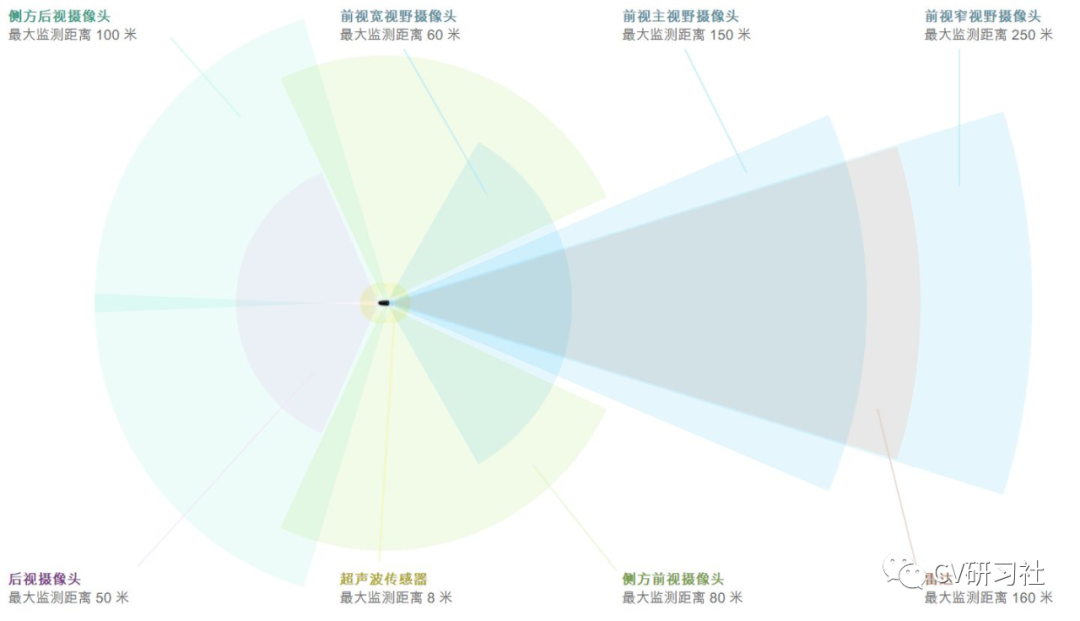
3. 三目相机采用三个不同焦距单目摄像机的组合,弥补了视野范围和景深不可兼得的问题,由宽视野的摄像头感知近距离范围,中视野的摄像头感知中距离范围,窄视野的摄像头感知远处目标。在AutoPilot 2.0的方案中三个摄像头分别为前视窄视野摄像头(最远感知250米)、前视主视野摄像头(最远感知150米)及前视宽视野摄像头(最远感知60米)。
4. 鱼眼相机:由十几个不同的透镜组合而成,在成像的过程中,入射光线经过不同程度的折射,投影到尺寸有限的成像平面上,使得鱼眼镜头拥有更大的视野范围。鱼眼相机的视场角一般能达到190°,广阔的视野范围也带来严重的图像畸变。通常应用在自动驾驶泊车功能中,安装在车辆前后保险杠处各一颗,左右后视镜下方各一颗,四颗鱼眼相机拼接成全景图覆盖车身周围5米左右范围做车位线检测。
5. 红外相机:利用普通CCD摄像机可以感受红外光的光谱特性,配合红外灯作为照明源达到夜视成像的效果,通常在芯片表面加滤光涂层或在镜头中加滤光片滤掉人眼不可见的光以恢复原来色彩,具有夜视效果。近红外线的绕射能力虽然可以穿透烟雾、墨渍、涤纶丝绸之类的材料,但是并不能穿透所有丝织物,所以红外相机是做不到对人体的透视功能的。
6. 还有事件摄像机,结构光摄像机,全景摄像机等。
相机特性
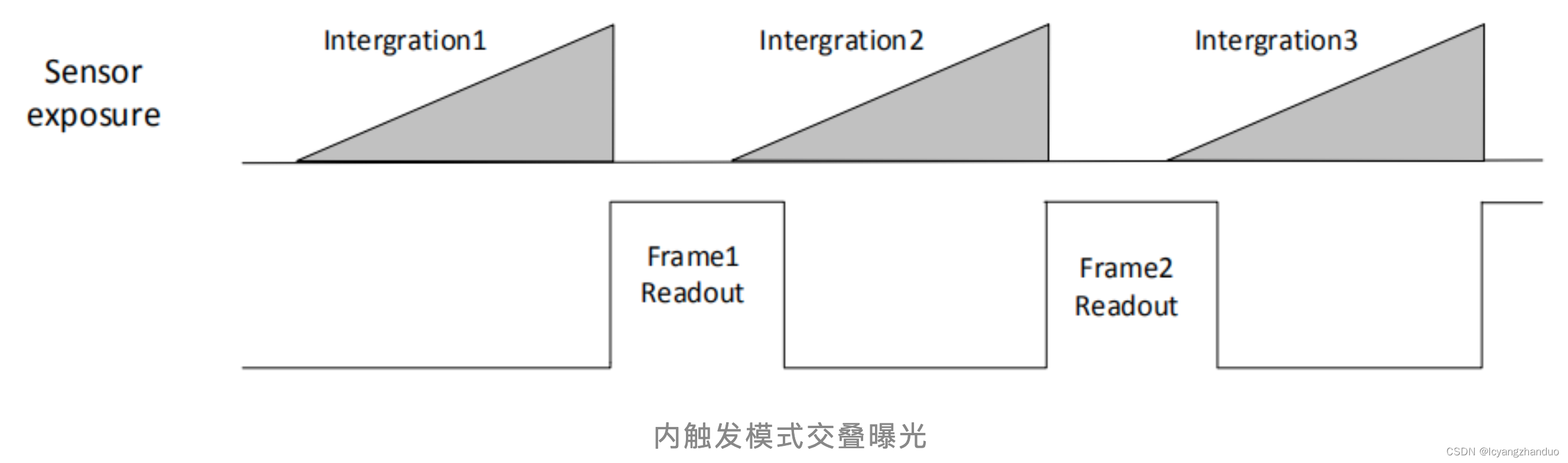
相机获取一帧图像分为曝光和读出两个阶段。相机使用的传感器不同,相机的曝光时间和读出时间的重叠关系也有所不同,分为交叠曝光和非交叠曝光两种。交叠曝光和非交叠曝光相比,交叠曝光可以减少曝光时间对出图时间的影响。
非交叠曝光是指当前帧的曝光和读出都完成后,再进行下一帧的曝光和读出。非交叠曝光帧周期大于曝光时间与帧读出时间的和。

交叠曝光是指当前帧的曝光和前一帧的读出过程有重叠,即前一帧读出的同时,下一帧已经开始曝光。
有的相机设置好软触发后,还可以对外输出strobe信号(用来对其他硬件进行硬触发),这里的strobe信号要比相机的曝光时间早(预输出),是由于strobe信号发出后,其他硬件需要有一定的响应时间,不然其他硬件总是晚于该相机的的曝光时间。 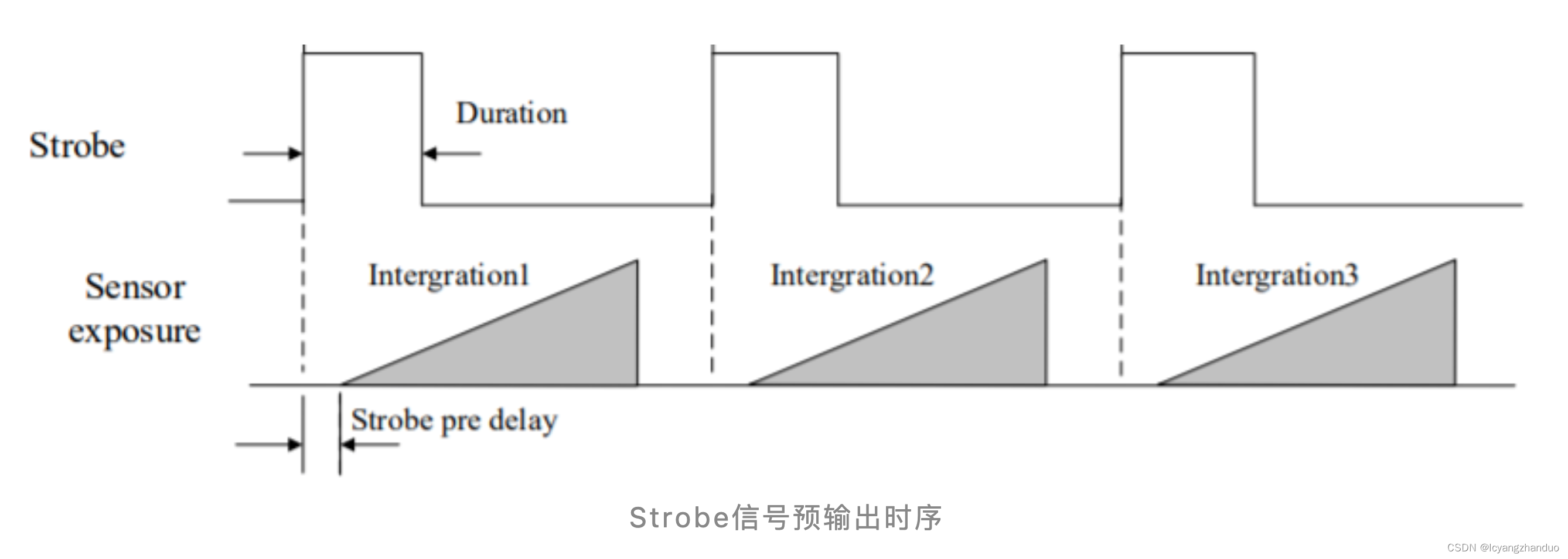
不推荐软触发的原因:API操作相比于硬触发(对传感器内部寄存器直接进行读写操作)明显是慢了。
超声波雷达
超声波在空气中传播时能量会有较大的衰减,难以得到准确的距离信息,一般不单独用于环境感知,或者仅仅用于对感知精度要求不高的场合,如倒车雷达的探测任务中。
超声波雷达通过声音在空气中传输的时间来判断障碍物的距离,在5米以内的精度能达到厘米级范围。流的工作频率有40KHz、48KHz、58KHz三种。
超声波雷达分类及特点
针对泊车场景一般在车辆周围安装12颗超声波雷达,车辆前后各安装4颗短距离超声波雷达,左右各安装2颗长距离超声波雷达。
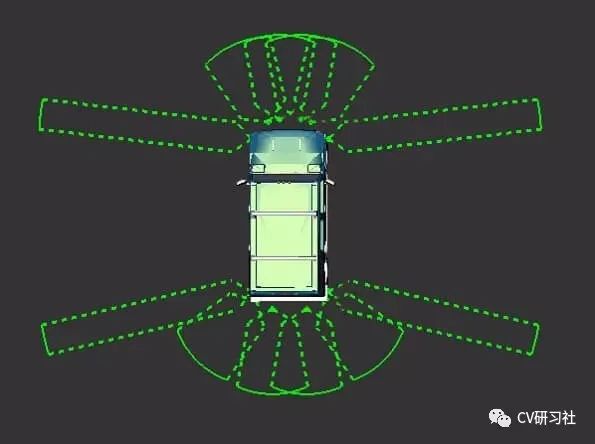
1. 短距离超声波(UPA)测量范围一般在3米以内,如上图所示,安装在车辆的前后保险杠处用于倒车时探测近处障碍物,常用于倒车报警功能。
2. 远距离超声波(APA)测量范围一般在5米以内,安装在车辆左右各两颗,用于探测近处障碍物并判断空车位,常用于泊车辅助功能。
超声波雷达受到雨水、粉尘、泥沙的干扰较小,在空气中穿透性强、 衰减小,短距离探测中精度较高,常用于泊车场景。但是也有其不足之处,比如:
-
声波的传输容易受到天气温度的影响,高低温情况下测距误差较大;
-
声速相比光速较慢,车速较快时超声波测距无法跟上汽车车距的实时变化,误差较大;
-
超声波雷达的输出是在视野范围内的距离值,但是无法准确的给出目标位置
Tesla传感器探测距离

IMU
新手入门:MEMS IMU原始数据采集和时间同步的那些坑(上) (qq.com)
新手入门:MEMS IMU原始数据采集和时间同步的那些坑(下) (qq.com)
降采样输出频率的选择
降采样到多少Hz合适呢?在GNSS/INS组合导航实测数据处理中,仿真GNSS短期中断(例如1~2分钟),考察定位漂移误差的统计值,即可定量评估组合导航的内在精度水平 [Niu Xiaoji, 2010],该方法可被用于确定某种载体在某种运动条件下能够接受的最低IMU降采样输出频率。例如:针对旋翼无人机载体,GNSS仿真中断实验结果表明,在IMU原始采样率足够的前提下(相对于无人机的旋翼抖动频率而言),采用平均降采样方式最多可以降低IMU输出频率至20~25Hz而不会对组合导航精度产生影响 [蔡磊等,2016];而对于车载或者轮式机器人载体而言,由于其运动更平稳,因此IMU降采样后的数据率可以低至5~10Hz。
IMU采样总结
本节我们以市场上两款常用的产品为例,对MEMS IMU的数据采集进行了详细介绍,相关要点总结和补充如下:
-
IMU原始采样率要足够高,必须充分满足采样定律,即达到载体动态频率的10~20倍,越高越好;
-
可以通过平均降采样的方式(而不是抽样方式),将高频率的IMU原始数据降低至惯导解算的数据率;而惯导解算的最低数据率是以不影响该GNSS/INS组合导航系统的精度为限的;
-
不要使用低通降噪滤波器,如果无法禁用,则应配置最高的带宽(Cut-off frequency);INS机械编排算法内部带有积分环节,本身就具有极强的低通滤波效果 [Yalong Ban, 2013,How the Integral Operations in INS Algorithms Overshadow the Contributions of IMU Signal Denoising Using Low-Pass Filters],因此对IMU原始数据进行低通滤波降噪是完全没有必要的。
-
IMU数据需保留最长的有效位数,切勿随意截取;
-
IMU数据读取的优先级要有所保障,以免造成IMU数据采集间隔不稳定甚至丢数;IMU数据必须保证连续稳定的采集(例如:对于普通车辆载体,不允许出现连续0.1s的丢数现象,且出现丢数时要有标记;IMU数据的丢数率和坏数率均应小于1e-5)。
时间同步
1PPS信号的误差一般为几十纳秒,可忽略不计;本地晶振时间一般采用微秒级别的计数器,那么最终GNSS数据和IMU数据的时间同步精度即为本地时间的精度,即微秒级。
时间同步总结
本节介绍了GNSS接收机、IMU以及其它多源导航传感器的时间同步,现将要点总结如下:
-
多源导航定位系统的时间基准应该是来自GNSS接收机的GNSS时间;
-
利用GNSS接收机的秒脉冲信号(1PPS)和MEMS IMU的数据采样脉冲信号,结合本地时间系统,可实现GNSS定位和IMU数据的高精度时间同步(即硬件同步);
-
应该尽量采用硬件时间同步,软件时间同步精度低、可靠性差;
-
从GNSS/INS组合导航的常见使用需求来看,MEMS IMU数据与GNSS的时间同步误差一般应小于10毫秒,最好是小于1毫秒;
-
基于GNSS接收机的1PPS信号和嵌入式处理器的本地时间系统,也可以实现相机和激光雷达等其它传感器与GNSS时间的硬件同步。
最后再次声明,本文所说的时间同步是指不同传感器的数据都打上共同的时标(即采用统一的时间系统),而不是指所有传感器都同步采样(即采样时刻对齐)。
指标
Gyro Angular Random Walk:角度随机游走(ARW),实际上就是陀螺输出的角速率白噪声。换算一下单位: 0.15°/sqrt(hr) = 0.0025°/s/sqrt(Hz)。可以用来描述预积分的残差。
Accelerator Velocity Random Walk:速度随机游走(VRW),也就是加速度计输出比力的白噪声, 0.012m/sec/sqrt(hr) = 0.0002m/s/sqrt(s) = 0.0002 m/s^2/sqrt(Hz) = 20ug/sqrt(Hz)

















 1050
1050

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}