






GNSS Outlier Mitigation via Graduated Non-Convexity Factor Graph Optimization
2022 香港理工
GNC(graduated non-convexity) 渐进非凸性
主要贡献:
基于伪距、多普勒观测建立图优化,自适应权重估计。自适应权重估计是基于non-convex Geman McClure函数和GNC实现。
通过“粗——精处理”,使用GNC,全局估计最佳权重。
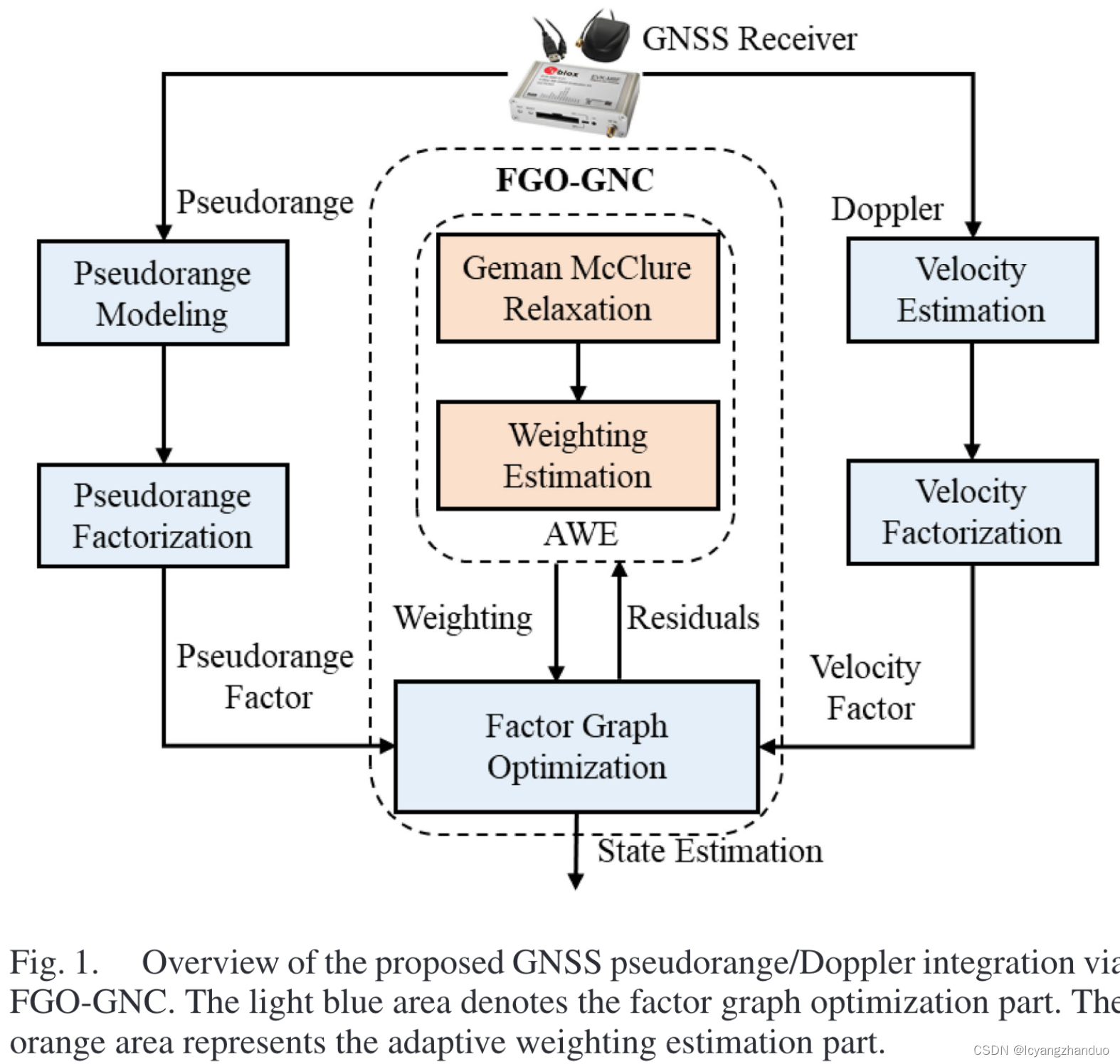
伪距因子

多普勒因子

整体误差

GNSS伪距、多普勒outlier识别
Doppler观测受多路径和非视距接受(NLOS reception)的影响相对较小,主要考虑伪距的outlier。因此优化方程变为如下,其中Ψ()为鲁棒函数。

根据 Black-Rangarajan Duality,鲁棒的非线性最小二乘问题等价于如下
 ωt,s表示卫星s在t时刻伪距的权重,在【0,1】区间。
ωt,s表示卫星s在t时刻伪距的权重,在【0,1】区间。
Φρ(ωt,s)函数是outlier处理,作为权重的惩罚。
上式中,x和权重是要求解的变量。
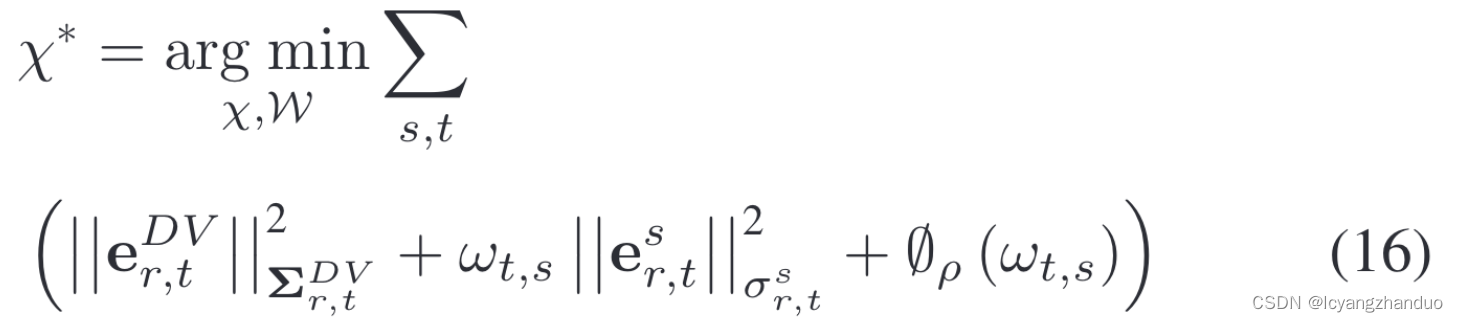
使用Geman McClure函数,加权的伪距误差等价于

cGM是决定Geman McClure函数*形状的参数。
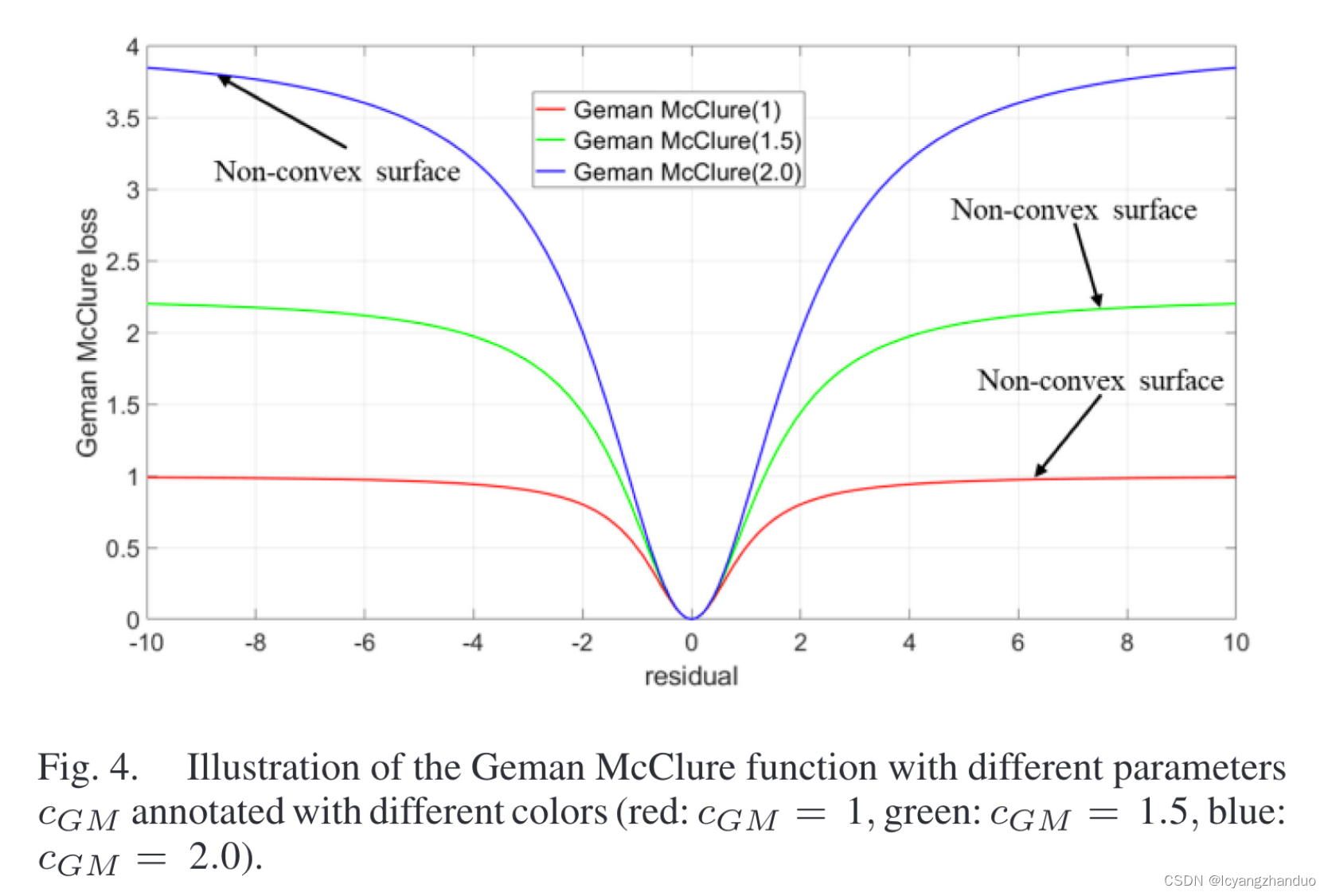
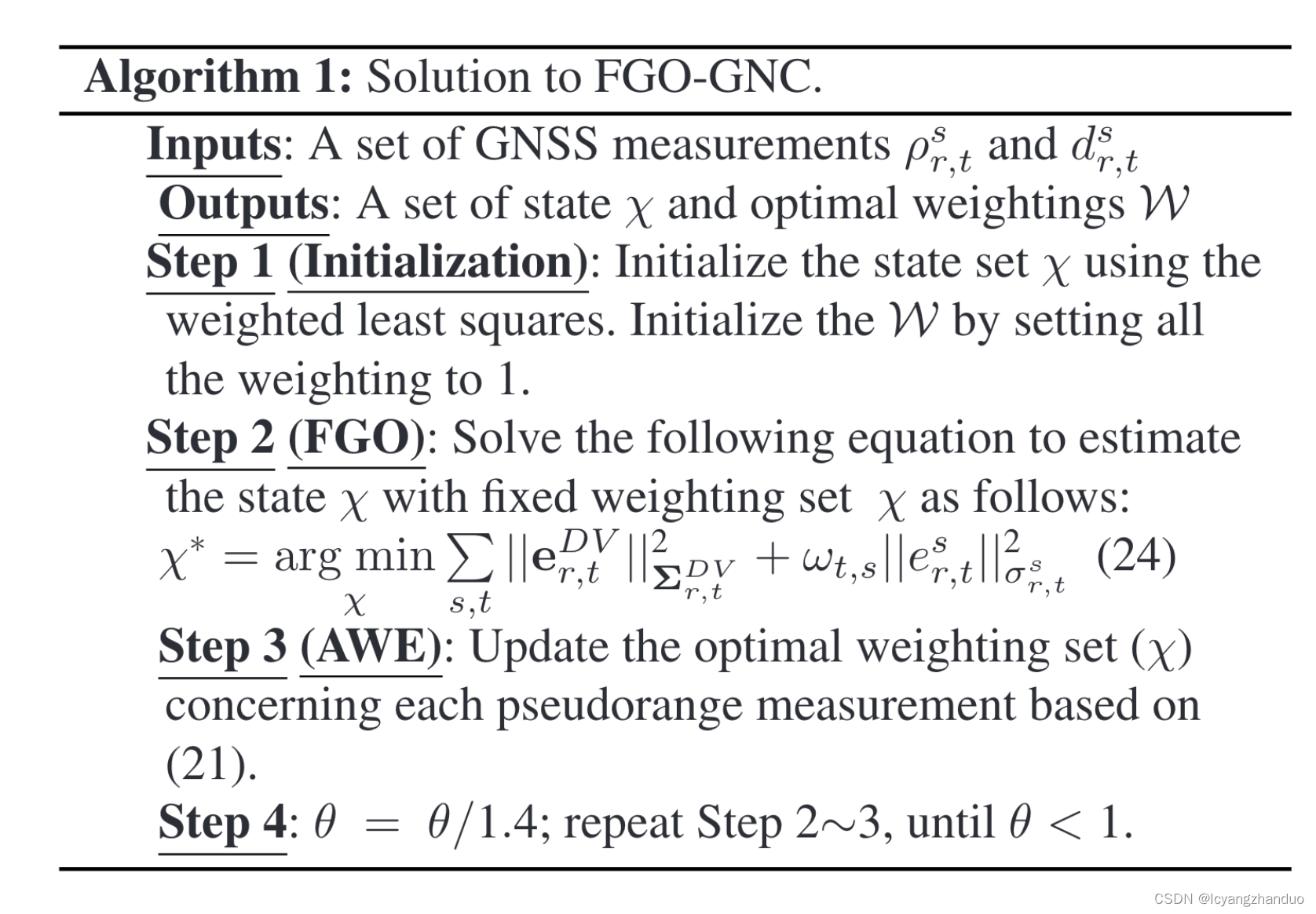
Geman McClure函数为非凸函数,有陷入局部最小值的问题。GNC方法可以用来解决该问题,如下所示,增加了参数θ。

θ比较大时,此函数变为凸函数,可以解决全局唯一解问题;为1时,又变成Geman McClure函数,可以消除outlier的影响。因此使用θ按照从大到小的顺序,通过多次迭代,每次迭代的结果作为下次迭代的初值,类似于从粗到精的优化。

16式变为如下形式
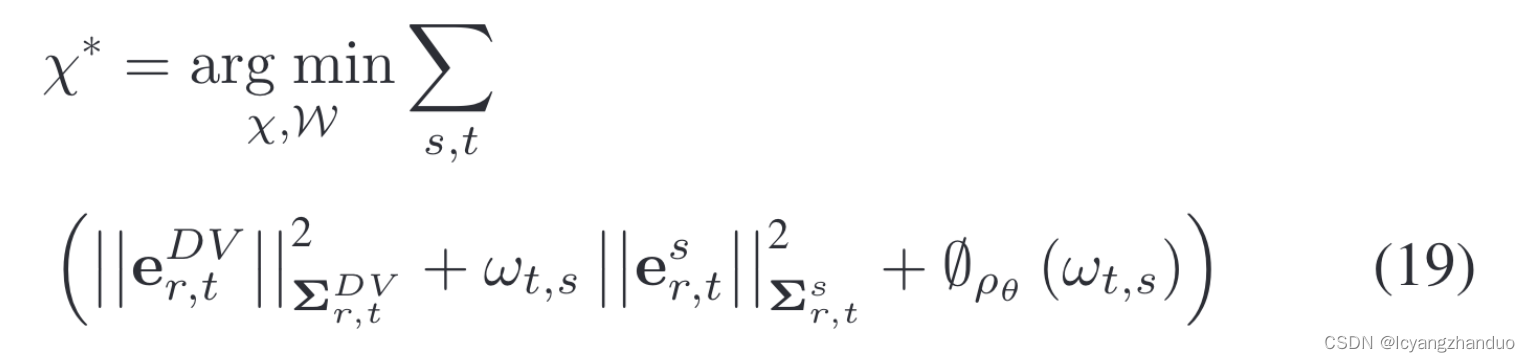
权重惩罚函数为


θ的初始值按照下式选择,保证首次把所有的观测的餐叉都在凸函数区域。然后按照1.4的比例缩小,直到θ小于1。
通常融合定位有一个相对来说比较好的初始值,是否可以只用GM损失函数?
https://blog.csdn.net/a13956621590/article/details/116033795
https://blog.csdn.net/weixin_43118645/article/details/114544456 以点云配准为例的博客
https://zhuanlan.zhihu.com/p/269230840
点云拼接、配准算法 Fast globel Registration
fast globel registration用于缝合部分重叠的点云。
优化目标为

ρ为一个优化激活函数称为:Geman-McClure。
 ,以Geman-McClure为核函数的话,目标函数优化比较困难,所以利用Black-Rangarajan duality定理对目标函数进行等价变换
,以Geman-McClure为核函数的话,目标函数优化比较困难,所以利用Black-Rangarajan duality定理对目标函数进行等价变换


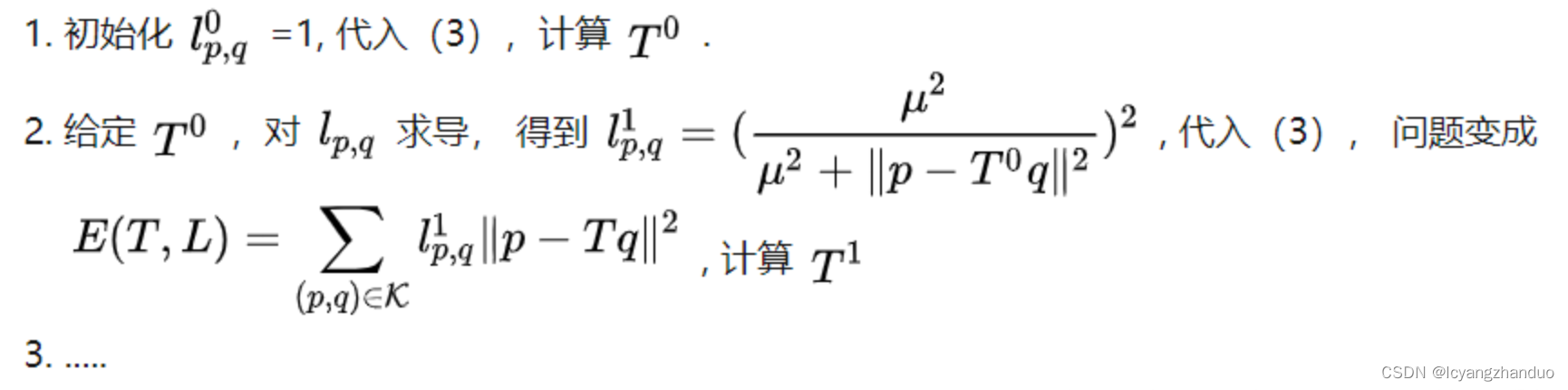
在使用中应该是交替优化T和L,其中L代表{Lp,q}过程如下:
Graduated Non-Convexity (GNC)是一般非凸代价函数ρ(·)的一种常用优化方法。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









