







学习各种AI技术有些日子了,从线性回归,到CNN,RNN到transfrom和大模型。搞来搞去发现这都不是我眼下要关注的事情。原理懂了,大的训练不起,小的也没啥地方用。人家模型白给你开源,也还要点血本来部署。除非是爱好纯钻研算法,我是没这精力了。索性放一边去。
春晚这几个大红袄子,那是无比闪亮的存在。之前宇树的四脚兽就已经够牛逼了。除了买不起,其实还是想要的。现在机器人的能力已经取得了很大的突破,能自由走动,翻滚,避障。能和人交流,互动。比起以前那些宾馆的圆胖桶,除了卖萌,功能实在是有限。顿时来了兴趣。
互联网上搜罗了一堆机器狗开发资料,发现大部分都是开源的,有兴趣自己弄来打就好了。难怪淘宝到处都是各种机器狗。通过deepseek、元宝、豆包给我分析了一下。锁定了Bittle、mechdog、湃湃狗这几款产品。

Bittlet精致小巧,他有一代opencat是个猫。使用 NyBoard V1 定制 Arduino 板,可驱动 16 个 PWM 舵机,并配备 IMU 用于平衡感知。还可以扩展各种模块,1600-1700左右性价比不错,不过是塑料的机身。

Mechdog采用 ESP32 控制器和 8 个高速空心杯舵机,支持多种开发语言,机身主要采用硬铝合金材质,坚固耐用且重量较轻,具有较高的强度和稳定性。价格要贵点,稍稍好点要2300左右。

说实在的这两款我纠结了很久,最终还是放弃了。选择了湃湃狗。原因就一个,感谢灯哥的无偿奉献,从电路图纸设计、模型结构、代码设计全部开源了。而且录制了详细的讲解视频。如果要玩具,前两者很好了。但是作为技术人员,想彻底的了解机器狗是怎么回事,还是要从底层下手,一点点的分析学习。不过这个款没怎么宣传,主要还是另一个产品菠萝狗。两者主要还是自由度有点区别,菠萝狗是8个自由度,湃湃狗是12个。我希望能更丰富点,所以选择了后者。
下单买了零件版本的湃湃狗,不过灯哥的群里有点冷清,可能时间太久了把,说话的人少,在等待狗狗的过程中,遇到好多热心的"狗友"。大家都热爱机械四脚兽,也都在摸索学习中,有幸凑了一份子,交流技术的同时,希望也能贡献自己的绵薄之力。
元宵节这天,零件都到齐了,因为湃湃狗没有对外发布安装视频,客服给在单独的售后群里提供了安装资料和视频。既然这个属于保密的,我也就不公开视频了。尊重知识产权。拿到手自己看了几遍视频,觉得差不多了。就开始装狗了,本想省略了几百个字,无奈各种掉坑里的事情还是一如既往的占版面:
首先,模型是3D打印的,我是搞过这个的,知道会有支撑痕迹要清理,各种残殇也正常,大腿之间的吻合间隙太紧,动用了美工刀和指甲打磨棒,折腾2个多小时,才把腿吻合装配好。比起安装视频里的关节顺滑还是差点意思,希望这个大腿卡口能扩大0.2的间距。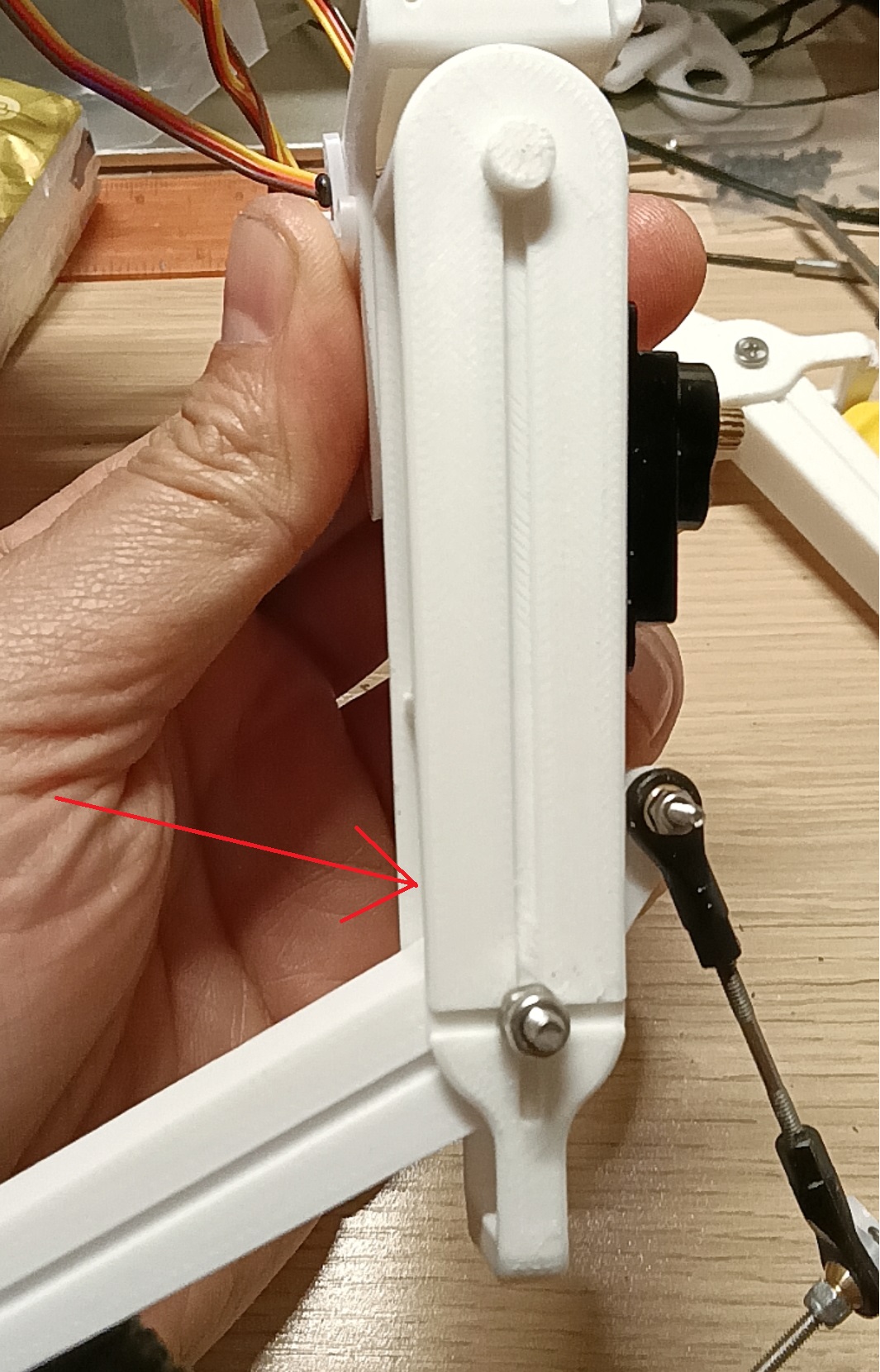
第二:肩膀的有个螺丝离着轴太近,没有避开螺帽,拧进去有点斜了,还要放轴承滑轮,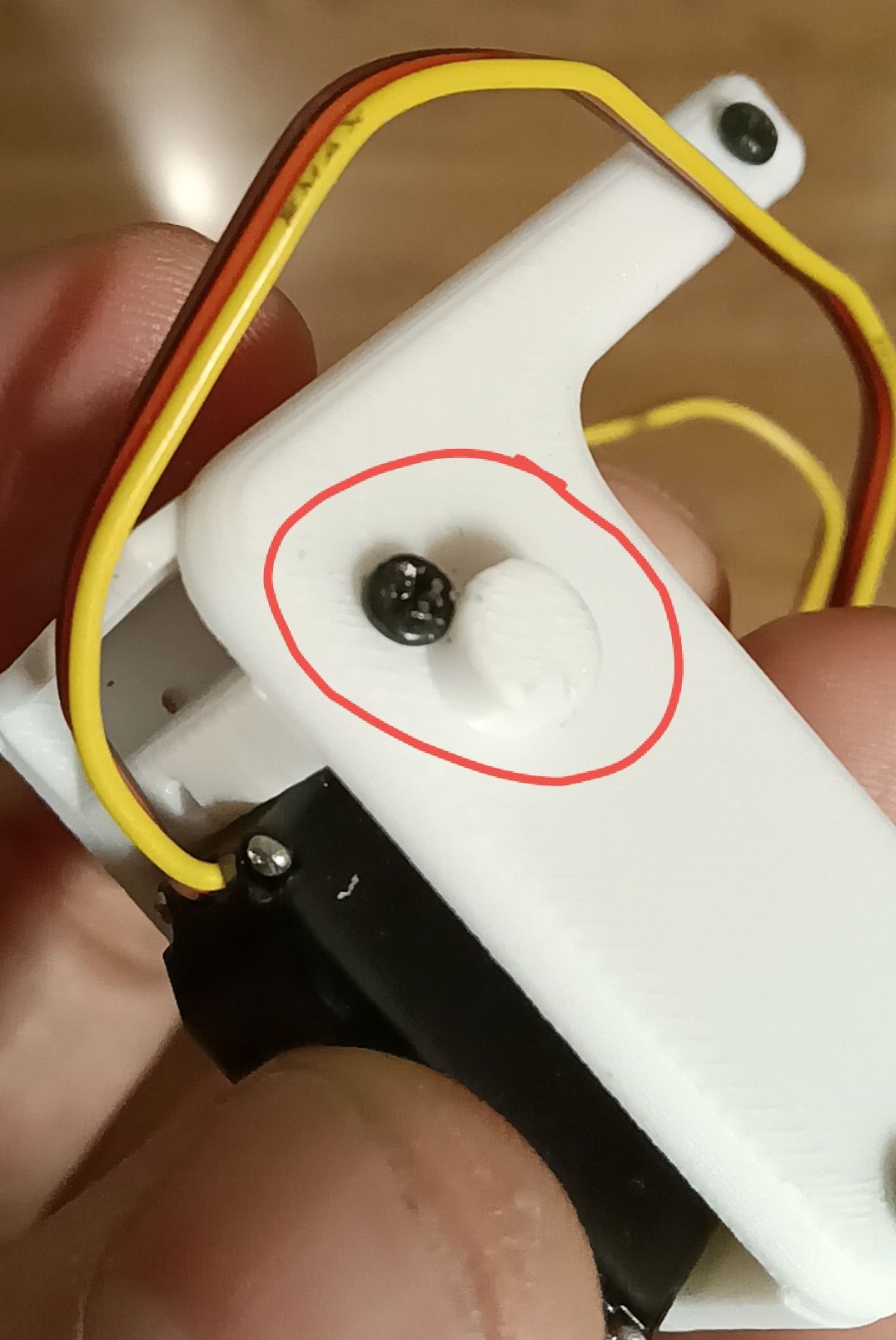 结合这俩问题,我都已经反应给客服了。希望能改进一下。也收到了客服的回馈,态度上还是不错的。
结合这俩问题,我都已经反应给客服了。希望能改进一下。也收到了客服的回馈,态度上还是不错的。
第三个:是电源模块,视频是老的焊接在一起的,新版本是两块叠加的。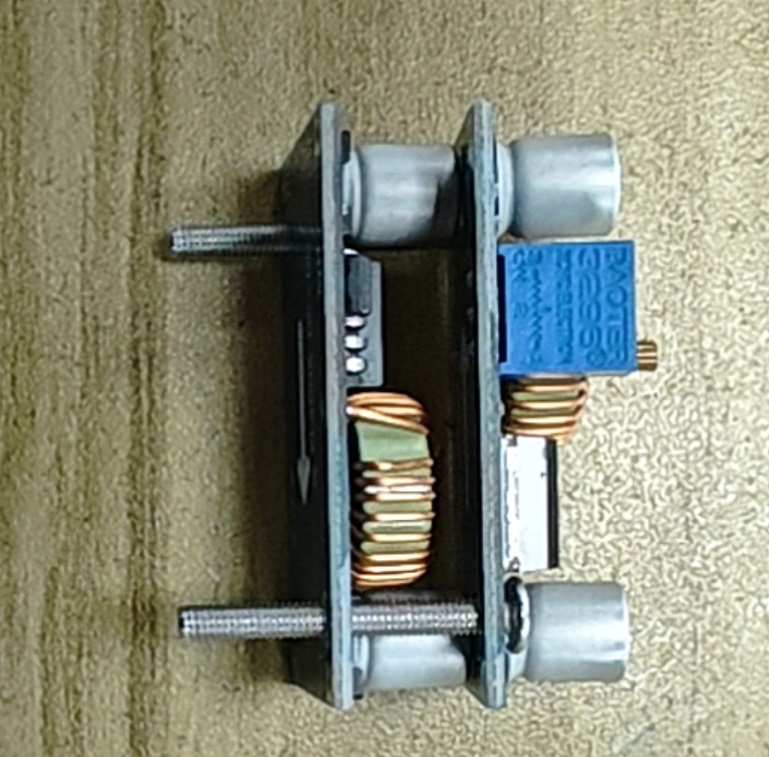 倒腾半天没装上,最后还是工作人员,告诉我要用长螺丝把两个电路板串一起安装下去。最后也算是装好了。不过有几个问题还是要灯哥注意一下,
倒腾半天没装上,最后还是工作人员,告诉我要用长螺丝把两个电路板串一起安装下去。最后也算是装好了。不过有几个问题还是要灯哥注意一下,
1:螺丝拧到底,会穿透底板,有个突出螺丝头不好看。而且会和电源线接触导致短路。除了螺丝还要提供绝缘垫片。我都不敢拧下去。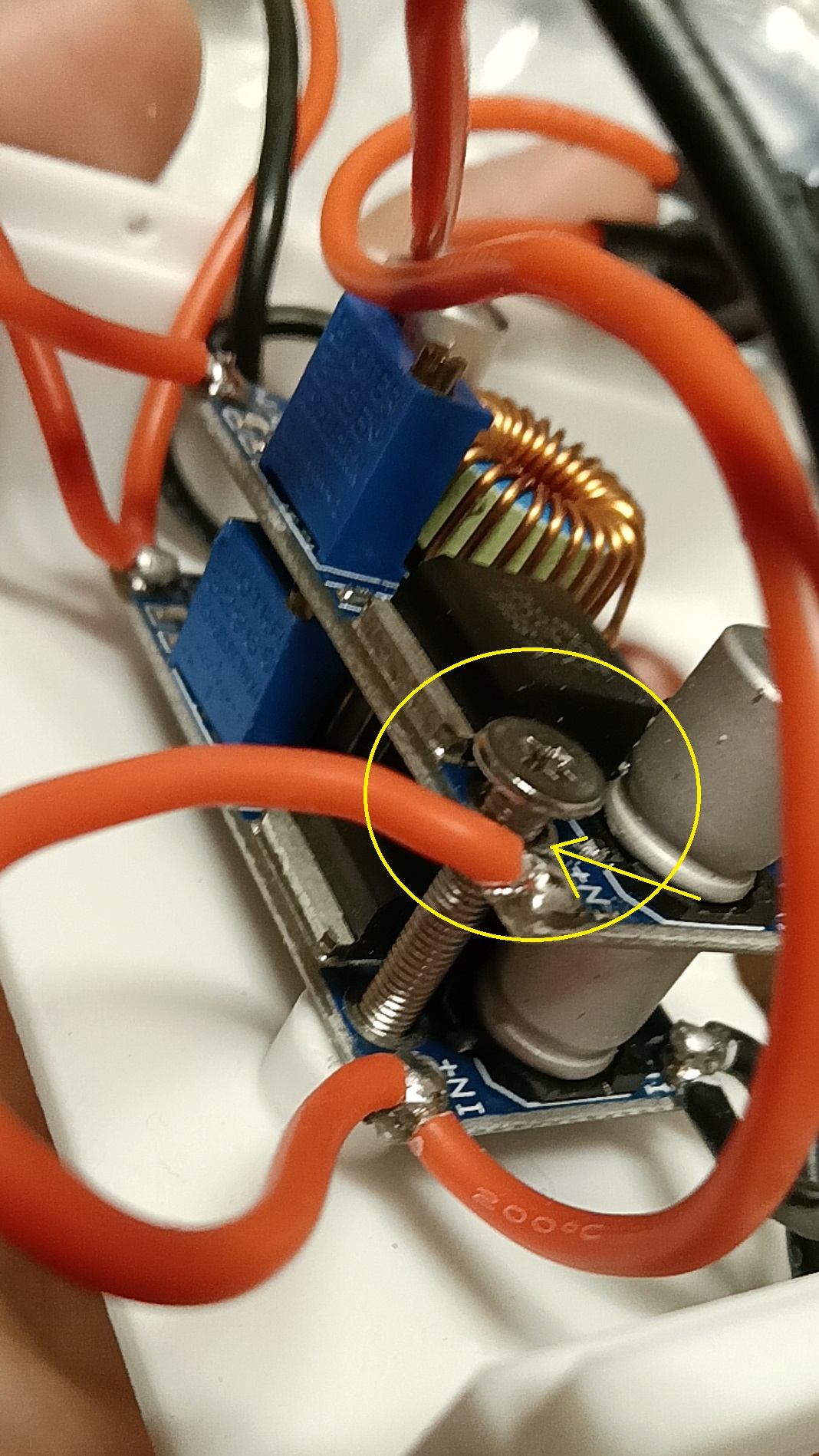
2:焊接的时候,线的长度最好能按照盒子形状裁剪,焊接的时候线往一边集中,开花一样焊接,不仅不好看,也不好装,还顶着大板子了。
3:可调电阻如果调好了。最好点上704,怕万一触碰了,导致出现意外结果。
第四个是我个人的问题了。习惯性思维认为接线插座应该都是一个方向排列,结果两排的排针是相对摆放的,要不是技术人员给我指出来,我都没反应到这上面去,导致后腿总是反方向运动。
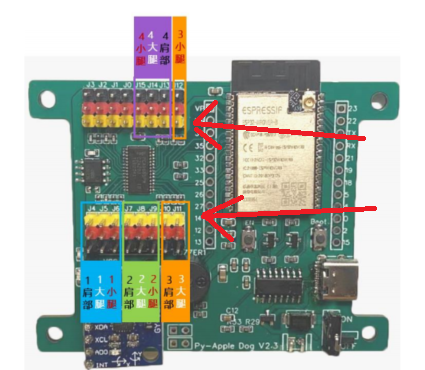
第四:还是习惯性思维,总是感觉哪个视频告诉我脚的顺序是交叉摆放的,所以一直记得是这个。结果装上去就是错的。官方的文字安装视频,接线图恰好少了位置和插针图。后来技术人员提供给我了图片,才发现四个腿是顺时针排序的。难怪脚都是反的。希望灯哥这边补充一下这两个图到接线图里面(后来在其他文档里找到了。但是还是建议修改视频安装部分的那个图,最直观) 。
。
第五:很重要的事情,一定要先完整看完视频,耐着性子也要看完。因为看到调试,才发现装完的狗,基本都要拆掉,因为电机要调试,所有舵机要松开。这一步幸亏我提早做了准备,没有一次全装齐。不过后来我线错了、狗腿顺序错误产生的的各种毛病,导致我重拆装了4次,要了命了。手都是麻的。
终于装完狗了,调平以后,狗血事情来了。走第一步,腿就瘸了。技术人员鉴定是烧了个舵机。吐血啊,因为是自己组装的,官方是不负责赔偿。只好我自己买了个新舵机,还没开始就交了几十块的学费。耐心等待新的舵机中。
最后几个注意事情:电动螺丝刀能提升效率,没有就手搓也行,就是有点累。没有电烙铁,就准备个打火机,和很小的铁棒,或者很小那种螺丝刀。因为有几个地方要烫洞。还要个大剪刀剪个卡子。那个拉杆的铁杆裸露距离是18mm,最后两个杆套子是互相垂直的,不是平行的哦。所以要准备个尺子,边拧边量。这三个工具视频是没说的,加上打磨棒和美工刀。还有注意观察拉杆都是朝外摆,连舵机的塑料轴是在拉杆下面的。不确定的地方,比对官方的模型就没错。
安装就介绍到这了。烧程序,调试这个部分下一篇再讲。太多人遇到这个问题了。这里只传递一个概念:固件就是芯片的操作系统,没有更新的话就烧录一次可以了。用官方的那个flash工具。参数照着灯哥的文档设置,先电erase清除flash,因为烧写文件无法对非零值进行操作,烧进去验证最后会失败,波特率减少一半效果会更好些。源码就是软件,一般我们就更新软件可以了,用uPyCraft的download来更新上去,原来固件里的boot.py删掉就行了,这是个固件自带的测试脚本。只要固件成功了,任何其他故障,都只是软件或者硬件电路的问题了。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









