









=====================================================
H.264源代码分析文章列表:
【编码 - x264】
x264源代码简单分析:x264命令行工具(x264.exe)
x264源代码简单分析:x264_slice_write()
x264源代码简单分析:宏块分析(Analysis)部分-帧内宏块(Intra)
x264源代码简单分析:宏块分析(Analysis)部分-帧间宏块(Inter)
x264源代码简单分析:熵编码(Entropy Encoding)部分
【解码 - libavcodec H.264 解码器】
FFmpeg的H.264解码器源代码简单分析:解析器(Parser)部分
FFmpeg的H.264解码器源代码简单分析:解码器主干部分
FFmpeg的H.264解码器源代码简单分析:熵解码(EntropyDecoding)部分
FFmpeg的H.264解码器源代码简单分析:宏块解码(Decode)部分-帧内宏块(Intra)
FFmpeg的H.264解码器源代码简单分析:宏块解码(Decode)部分-帧间宏块(Inter)
FFmpeg的H.264解码器源代码简单分析:环路滤波(Loop Filter)部分
=====================================================
本文分析FFmpeg的H.264解码器的宏块解码(Decode)部分的源代码。FFmpeg的H.264解码器调用decode_slice()函数完成了解码工作。这些解码工作可以大体上分为3个步骤:熵解码,宏块解码以及环路滤波。本文分析这3个步骤中的第2个步骤。由于宏块解码部分的内容比较多,因此将本部分内容拆分成两篇文章:一篇文章记录帧内预测宏块(Intra)的宏块解码,另一篇文章记录帧间预测宏块(Inter)的宏块解码。
函数调用关系图
宏块解码(Decode)部分的源代码在整个H.264解码器中的位置如下图所示。

宏块解码(Decode)部分的源代码的调用关系如下图所示。

hl_decode_mb_simple_8()的定义是无法在源代码中直接找到的,这是因为它实际代码的函数名称是使用宏的方式写的。hl_decode_mb_simple_8()的源代码实际上就是FUNC(hl_decode_mb)()函数的源代码。
从函数调用图中可以看出,FUNC(hl_decode_mb)()根据宏块类型的不同作不同的处理:如果帧内预测宏块(INTRA),就会调用hl_decode_mb_predict_luma()进行帧内预测;如果是帧间预测宏块(INTER),就会调用FUNC(hl_motion_422)()或者FUNC(hl_motion_420)()进行四分之一像素运动补偿。
经过帧内预测或者帧间预测步骤之后,就得到了预测数据。随后FUNC(hl_decode_mb)()会调用hl_decode_mb_idct_luma()等几个函数对残差数据进行DCT反变换工作,并将变换后的数据叠加到预测数据上,形成解码后的图像数据。
由于帧内预测宏块和帧间预测宏块的解码工作都比较复杂,因此分成两篇文章记录这两部分的源代码。本文记录帧内预测宏块解码时候的源代码。
下面首先回顾一下decode_slice()函数。
decode_slice()
decode_slice()用于解码H.264的Slice。该函数完成了“熵解码”、“宏块解码”、“环路滤波”的功能。它的定义位于libavcodec\h264_slice.c,如下所示。//解码slice
//三个主要步骤:
//1.熵解码(CAVLC/CABAC)
//2.宏块解码
//3.环路滤波
//此外还包含了错误隐藏代码
static int decode_slice(struct AVCodecContext *avctx, void *arg)
{
H264Context *h = *(void **)arg;
int lf_x_start = h->mb_x;
h->mb_skip_run = -1;
av_assert0(h->block_offset[15] == (4 * ((scan8[15] - scan8[0]) & 7) << h->pixel_shift) + 4 * h->linesize * ((scan8[15] - scan8[0]) >> 3));
h->is_complex = FRAME_MBAFF(h) || h->picture_structure != PICT_FRAME ||
avctx->codec_id != AV_CODEC_ID_H264 ||
(CONFIG_GRAY && (h->flags & CODEC_FLAG_GRAY));
if (!(h->avctx->active_thread_type & FF_THREAD_SLICE) && h->picture_structure == PICT_FRAME && h->er.error_status_table) {
const int start_i = av_clip(h->resync_mb_x + h->resync_mb_y * h->mb_width, 0, h->mb_num - 1);
if (start_i) {
int prev_status = h->er.error_status_table[h->er.mb_index2xy[start_i - 1]];
prev_status &= ~ VP_START;
if (prev_status != (ER_MV_END | ER_DC_END | ER_AC_END))
h->er.error_occurred = 1;
}
}
//CABAC情况
if (h->pps.cabac) {
/* realign */
align_get_bits(&h->gb);
/* init cabac */
//初始化CABAC解码器
ff_init_cabac_decoder(&h->cabac,
h->gb.buffer + get_bits_count(&h->gb) / 8,
(get_bits_left(&h->gb) + 7) / 8);
ff_h264_init_cabac_states(h);
//循环处理每个宏块
for (;;) {
// START_TIMER
//解码CABAC数据
int ret = ff_h264_decode_mb_cabac(h);
int eos;
// STOP_TIMER("decode_mb_cabac")
//解码宏块
if (ret >= 0)
ff_h264_hl_decode_mb(h);
// FIXME optimal? or let mb_decode decode 16x32 ?
//宏块级帧场自适应。很少接触
if (ret >= 0 && FRAME_MBAFF(h)) {
h->mb_y++;
ret = ff_h264_decode_mb_cabac(h);
//解码宏块
if (ret >= 0)
ff_h264_hl_decode_mb(h);
h->mb_y--;
}
eos = get_cabac_terminate(&h->cabac);
if ((h->workaround_bugs & FF_BUG_TRUNCATED) &&
h->cabac.bytestream > h->cabac.bytestream_end + 2) {
//错误隐藏
er_add_slice(h, h->resync_mb_x, h->resync_mb_y, h->mb_x - 1,
h->mb_y, ER_MB_END);
if (h->mb_x >= lf_x_start)
loop_filter(h, lf_x_start, h->mb_x + 1);
return 0;
}
if (h->cabac.bytestream > h->cabac.bytestream_end + 2 )
av_log(h->avctx, AV_LOG_DEBUG, "bytestream overread %"PTRDIFF_SPECIFIER"\n", h->cabac.bytestream_end - h->cabac.bytestream);
if (ret < 0 || h->cabac.bytestream > h->cabac.bytestream_end + 4) {
av_log(h->avctx, AV_LOG_ERROR,
"error while decoding MB %d %d, bytestream %"PTRDIFF_SPECIFIER"\n",
h->mb_x, h->mb_y,
h->cabac.bytestream_end - h->cabac.bytestream);
er_add_slice(h, h->resync_mb_x, h->resync_mb_y, h->mb_x,
h->mb_y, ER_MB_ERROR);
return AVERROR_INVALIDDATA;
}
//mb_x自增
//如果自增后超过了一行的mb个数
if (++h->mb_x >= h->mb_width) {
//环路滤波
loop_filter(h, lf_x_start, h->mb_x);
h->mb_x = lf_x_start = 0;
decode_finish_row(h);
//mb_y自增(处理下一行)
++h->mb_y;
//宏块级帧场自适应,暂不考虑
if (FIELD_OR_MBAFF_PICTURE(h)) {
++h->mb_y;
if (FRAME_MBAFF(h) && h->mb_y < h->mb_height)
predict_field_decoding_flag(h);
}
}
//如果mb_y超过了mb的行数
if (eos || h->mb_y >= h->mb_height) {
tprintf(h->avctx, "slice end %d %d\n",
get_bits_count(&h->gb), h->gb.size_in_bits);
er_add_slice(h, h->resync_mb_x, h->resync_mb_y, h->mb_x - 1,
h->mb_y, ER_MB_END);
if (h->mb_x > lf_x_start)
loop_filter(h, lf_x_start, h->mb_x);
return 0;
}
}
} else {
//CAVLC情况
//循环处理每个宏块
for (;;) {
//解码宏块的CAVLC
int ret = ff_h264_decode_mb_cavlc(h);
//解码宏块
if (ret >= 0)
ff_h264_hl_decode_mb(h);
// FIXME optimal? or let mb_decode decode 16x32 ?
if (ret >= 0 && FRAME_MBAFF(h)) {
h->mb_y++;
ret = ff_h264_decode_mb_cavlc(h);
if (ret >= 0)
ff_h264_hl_decode_mb(h);
h->mb_y--;
}
if (ret < 0) {
av_log(h->avctx, AV_LOG_ERROR,
"error while decoding MB %d %d\n", h->mb_x, h->mb_y);
er_add_slice(h, h->resync_mb_x, h->resync_mb_y, h->mb_x,
h->mb_y, ER_MB_ERROR);
return ret;
}
if (++h->mb_x >= h->mb_width) {
//环路滤波
loop_filter(h, lf_x_start, h->mb_x);
h->mb_x = lf_x_start = 0;
decode_finish_row(h);
++h->mb_y;
if (FIELD_OR_MBAFF_PICTURE(h)) {
++h->mb_y;
if (FRAME_MBAFF(h) && h->mb_y < h->mb_height)
predict_field_decoding_flag(h);
}
if (h->mb_y >= h->mb_height) {
tprintf(h->avctx, "slice end %d %d\n",
get_bits_count(&h->gb), h->gb.size_in_bits);
if ( get_bits_left(&h->gb) == 0
|| get_bits_left(&h->gb) > 0 && !(h->avctx->err_recognition & AV_EF_AGGRESSIVE)) {
//错误隐藏
er_add_slice(h, h->resync_mb_x, h->resync_mb_y,
h->mb_x - 1, h->mb_y, ER_MB_END);
return 0;
} else {
er_add_slice(h, h->resync_mb_x, h->resync_mb_y,
h->mb_x, h->mb_y, ER_MB_END);
return AVERROR_INVALIDDATA;
}
}
}
if (get_bits_left(&h->gb) <= 0 && h->mb_skip_run <= 0) {
tprintf(h->avctx, "slice end %d %d\n",
get_bits_count(&h->gb), h->gb.size_in_bits);
if (get_bits_left(&h->gb) == 0) {
er_add_slice(h, h->resync_mb_x, h->resync_mb_y,
h->mb_x - 1, h->mb_y, ER_MB_END);
if (h->mb_x > lf_x_start)
loop_filter(h, lf_x_start, h->mb_x);
return 0;
} else {
er_add_slice(h, h->resync_mb_x, h->resync_mb_y, h->mb_x,
h->mb_y, ER_MB_ERROR);
return AVERROR_INVALIDDATA;
}
}
}
}
}
重复记录一下decode_slice()的流程:
(1)判断H.264码流是CABAC编码还是CAVLC编码,进入不同的处理循环。
(2)如果是CABAC编码,首先调用ff_init_cabac_decoder()初始化CABAC解码器。然后进入一个循环,依次对每个宏块进行以下处理:
a)调用ff_h264_decode_mb_cabac()进行CABAC熵解码b)调用ff_h264_hl_decode_mb()进行宏块解码c)解码一行宏块之后调用loop_filter()进行环路滤波d)此外还有可能调用er_add_slice()进行错误隐藏处理
(3)如果是CABAC编码,直接进入一个循环,依次对每个宏块进行以下处理:
可以看出,宏块解码函数是ff_h264_hl_decode_mb()。下面看一下这个函数。a)调用ff_h264_decode_mb_cavlc()进行CAVLC熵解码b)调用ff_h264_hl_decode_mb()进行宏块解码c)解码一行宏块之后调用loop_filter()进行环路滤波d)此外还有可能调用er_add_slice()进行错误隐藏处理
ff_h264_hl_decode_mb()
ff_h264_hl_decode_mb()完成了宏块解码的工作。“宏块解码”就是根据前一步骤“熵解码”得到的宏块类型、运动矢量、参考帧、DCT残差数据等信息恢复图像数据的过程。该函数的定义位于libavcodec\h264_mb.c,如下所示。//解码宏块
void ff_h264_hl_decode_mb(H264Context *h)
{
//宏块序号 mb_xy = mb_x + mb_y*mb_stride
const int mb_xy = h->mb_xy;
//宏块类型
const int mb_type = h->cur_pic.mb_type[mb_xy];
//比较少见,PCM类型
int is_complex = CONFIG_SMALL || h->is_complex ||
IS_INTRA_PCM(mb_type) || h->qscale == 0;
//YUV444
if (CHROMA444(h)) {
if (is_complex || h->pixel_shift)
hl_decode_mb_444_complex(h);
else
hl_decode_mb_444_simple_8(h);
} else if (is_complex) {
hl_decode_mb_complex(h); //PCM类型?
} else if (h->pixel_shift) {
hl_decode_mb_simple_16(h); //色彩深度为16
} else
hl_decode_mb_simple_8(h); //色彩深度为8
}
可以看出ff_h264_hl_decode_mb()的定义很简单:通过系统的参数(例如颜色位深是不是8bit,YUV采样格式是不是4:4:4等)判断该调用哪一个函数作为解码函数。由于最普遍的情况是解码8bit的YUV420P格式的H.264数据,因此一般情况下会调用hl_decode_mb_simple_8()。这里有一点需要注意:如果我们直接查找hl_decode_mb_simple_8()的定义,会发现这个函数是找不到的。这个函数的定义实际上就是FUNC(hl_decode_mb)()函数。FUNC(hl_decode_mb)()函数名称中的宏“FUNC()”展开后就是hl_decode_mb_simple_8()。那么我们看一下FUNC(hl_decode_mb)()函数。
FUNC(hl_decode_mb)()
FUNC(hl_decode_mb)()的定义位于libavcodec\h264_mb_template.c。下面看一下FUNC(hl_decode_mb)()函数的定义。PS:在这里需要注意,FFmpeg H.264解码器中名称中包含“_template”的C语言文件中的函数都是使用类似于“FUNC(name)()”的方式书写的,这样做的目的大概是为了适配各种各样的功能。例如在处理16bit的H.264码流的时候,FUNC(hl_decode_mb)()可以展开为hl_decode_mb_simple_16()函数;同理,FUNC(hl_decode_mb)()在其他条件下也可以展开为hl_decode_mb_complex()函数。
//hl是什么意思?high level?
/*
* 注释:雷霄骅
* leixiaohua1020@126.com
* http://blog.csdn.net/leixiaohua1020
*
* 宏块解码
* 帧内宏块:帧内预测->残差DCT反变换
* 帧间宏块:帧间预测(运动补偿)->残差DCT反变换
*
*/
static av_noinline void FUNC(hl_decode_mb)(H264Context *h)
{
//序号:x(行)和y(列)
const int mb_x = h->mb_x;
const int mb_y = h->mb_y;
//宏块序号 mb_xy = mb_x + mb_y*mb_stride
const int mb_xy = h->mb_xy;
//宏块类型
const int mb_type = h->cur_pic.mb_type[mb_xy];
//这三个变量存储最后处理完成的像素值
uint8_t *dest_y, *dest_cb, *dest_cr;
int linesize, uvlinesize /*dct_offset*/;
int i, j;
int *block_offset = &h->block_offset[0];
const int transform_bypass = !SIMPLE && (h->qscale == 0 && h->sps.transform_bypass);
/* is_h264 should always be true if SVQ3 is disabled. */
const int is_h264 = !CONFIG_SVQ3_DECODER || SIMPLE || h->avctx->codec_id == AV_CODEC_ID_H264;
void (*idct_add)(uint8_t *dst, int16_t *block, int stride);
const int block_h = 16 >> h->chroma_y_shift;
const int chroma422 = CHROMA422(h);
//存储Y,U,V像素的位置:dest_y,dest_cb,dest_cr
//分别对应AVFrame的data[0],data[1],data[2]
dest_y = h->cur_pic.f.data[0] + ((mb_x << PIXEL_SHIFT) + mb_y * h->linesize) * 16;
dest_cb = h->cur_pic.f.data[1] + (mb_x << PIXEL_SHIFT) * 8 + mb_y * h->uvlinesize * block_h;
dest_cr = h->cur_pic.f.data[2] + (mb_x << PIXEL_SHIFT) * 8 + mb_y * h->uvlinesize * block_h;
h->vdsp.prefetch(dest_y + (h->mb_x & 3) * 4 * h->linesize + (64 << PIXEL_SHIFT), h->linesize, 4);
h->vdsp.prefetch(dest_cb + (h->mb_x & 7) * h->uvlinesize + (64 << PIXEL_SHIFT), dest_cr - dest_cb, 2);
h->list_counts[mb_xy] = h->list_count;
//系统中包含了
//#define SIMPLE 1
//不会执行?
if (!SIMPLE && MB_FIELD(h)) {
linesize = h->mb_linesize = h->linesize * 2;
uvlinesize = h->mb_uvlinesize = h->uvlinesize * 2;
block_offset = &h->block_offset[48];
if (mb_y & 1) { // FIXME move out of this function?
dest_y -= h->linesize * 15;
dest_cb -= h->uvlinesize * (block_h - 1);
dest_cr -= h->uvlinesize * (block_h - 1);
}
if (FRAME_MBAFF(h)) {
int list;
for (list = 0; list < h->list_count; list++) {
if (!USES_LIST(mb_type, list))
continue;
if (IS_16X16(mb_type)) {
int8_t *ref = &h->ref_cache[list][scan8[0]];
fill_rectangle(ref, 4, 4, 8, (16 + *ref) ^ (h->mb_y & 1), 1);
} else {
for (i = 0; i < 16; i += 4) {
int ref = h->ref_cache[list][scan8[i]];
if (ref >= 0)
fill_rectangle(&h->ref_cache[list][scan8[i]], 2, 2,
8, (16 + ref) ^ (h->mb_y & 1), 1);
}
}
}
}
} else {
linesize = h->mb_linesize = h->linesize;
uvlinesize = h->mb_uvlinesize = h->uvlinesize;
// dct_offset = s->linesize * 16;
}
//系统中包含了
//#define SIMPLE 1
//不会执行?
if (!SIMPLE && IS_INTRA_PCM(mb_type)) {
const int bit_depth = h->sps.bit_depth_luma;
if (PIXEL_SHIFT) {
int j;
GetBitContext gb;
init_get_bits(&gb, h->intra_pcm_ptr,
ff_h264_mb_sizes[h->sps.chroma_format_idc] * bit_depth);
for (i = 0; i < 16; i++) {
uint16_t *tmp_y = (uint16_t *)(dest_y + i * linesize);
for (j = 0; j < 16; j++)
tmp_y[j] = get_bits(&gb, bit_depth);
}
if (SIMPLE || !CONFIG_GRAY || !(h->flags & CODEC_FLAG_GRAY)) {
if (!h->sps.chroma_format_idc) {
for (i = 0; i < block_h; i++) {
uint16_t *tmp_cb = (uint16_t *)(dest_cb + i * uvlinesize);
uint16_t *tmp_cr = (uint16_t *)(dest_cr + i * uvlinesize);
for (j = 0; j < 8; j++) {
tmp_cb[j] = tmp_cr[j] = 1 << (bit_depth - 1);
}
}
} else {
for (i = 0; i < block_h; i++) {
uint16_t *tmp_cb = (uint16_t *)(dest_cb + i * uvlinesize);
for (j = 0; j < 8; j++)
tmp_cb[j] = get_bits(&gb, bit_depth);
}
for (i = 0; i < block_h; i++) {
uint16_t *tmp_cr = (uint16_t *)(dest_cr + i * uvlinesize);
for (j = 0; j < 8; j++)
tmp_cr[j] = get_bits(&gb, bit_depth);
}
}
}
} else {
for (i = 0; i < 16; i++)
memcpy(dest_y + i * linesize, h->intra_pcm_ptr + i * 16, 16);
if (SIMPLE || !CONFIG_GRAY || !(h->flags & CODEC_FLAG_GRAY)) {
if (!h->sps.chroma_format_idc) {
for (i = 0; i < 8; i++) {
memset(dest_cb + i * uvlinesize, 1 << (bit_depth - 1), 8);
memset(dest_cr + i * uvlinesize, 1 << (bit_depth - 1), 8);
}
} else {
const uint8_t *src_cb = h->intra_pcm_ptr + 256;
const uint8_t *src_cr = h->intra_pcm_ptr + 256 + block_h * 8;
for (i = 0; i < block_h; i++) {
memcpy(dest_cb + i * uvlinesize, src_cb + i * 8, 8);
memcpy(dest_cr + i * uvlinesize, src_cr + i * 8, 8);
}
}
}
}
} else {
//Intra类型
//Intra4x4或者Intra16x16
if (IS_INTRA(mb_type)) {
if (h->deblocking_filter)
xchg_mb_border(h, dest_y, dest_cb, dest_cr, linesize,
uvlinesize, 1, 0, SIMPLE, PIXEL_SHIFT);
if (SIMPLE || !CONFIG_GRAY || !(h->flags & CODEC_FLAG_GRAY)) {
h->hpc.pred8x8[h->chroma_pred_mode](dest_cb, uvlinesize);
h->hpc.pred8x8[h->chroma_pred_mode](dest_cr, uvlinesize);
}
//帧内预测-亮度
hl_decode_mb_predict_luma(h, mb_type, is_h264, SIMPLE,
transform_bypass, PIXEL_SHIFT,
block_offset, linesize, dest_y, 0);
if (h->deblocking_filter)
xchg_mb_border(h, dest_y, dest_cb, dest_cr, linesize,
uvlinesize, 0, 0, SIMPLE, PIXEL_SHIFT);
} else if (is_h264) {
//Inter类型
//运动补偿
if (chroma422) {
FUNC(hl_motion_422)(h, dest_y, dest_cb, dest_cr,
h->qpel_put, h->h264chroma.put_h264_chroma_pixels_tab,
h->qpel_avg, h->h264chroma.avg_h264_chroma_pixels_tab,
h->h264dsp.weight_h264_pixels_tab,
h->h264dsp.biweight_h264_pixels_tab);
} else {
//“*_put”处理单向预测,“*_avg”处理双向预测,“weight”处理加权预测
//h->qpel_put[16]包含了单向预测的四分之一像素运动补偿所有样点处理的函数
//两个像素之间横向的点(内插点和原始的点)有4个,纵向的点有4个,组合起来一共16个
//h->qpel_avg[16]情况也类似
FUNC(hl_motion_420)(h, dest_y, dest_cb, dest_cr,
h->qpel_put, h->h264chroma.put_h264_chroma_pixels_tab,
h->qpel_avg, h->h264chroma.avg_h264_chroma_pixels_tab,
h->h264dsp.weight_h264_pixels_tab,
h->h264dsp.biweight_h264_pixels_tab);
}
}
//亮度的IDCT
hl_decode_mb_idct_luma(h, mb_type, is_h264, SIMPLE, transform_bypass,
PIXEL_SHIFT, block_offset, linesize, dest_y, 0);
//色度的IDCT(没有写在一个单独的函数中)
if ((SIMPLE || !CONFIG_GRAY || !(h->flags & CODEC_FLAG_GRAY)) &&
(h->cbp & 0x30)) {
uint8_t *dest[2] = { dest_cb, dest_cr };
//transform_bypass=0,不考虑
if (transform_bypass) {
if (IS_INTRA(mb_type) && h->sps.profile_idc == 244 &&
(h->chroma_pred_mode == VERT_PRED8x8 ||
h->chroma_pred_mode == HOR_PRED8x8)) {
h->hpc.pred8x8_add[h->chroma_pred_mode](dest[0],
block_offset + 16,
h->mb + (16 * 16 * 1 << PIXEL_SHIFT),
uvlinesize);
h->hpc.pred8x8_add[h->chroma_pred_mode](dest[1],
block_offset + 32,
h->mb + (16 * 16 * 2 << PIXEL_SHIFT),
uvlinesize);
} else {
idct_add = h->h264dsp.h264_add_pixels4_clear;
for (j = 1; j < 3; j++) {
for (i = j * 16; i < j * 16 + 4; i++)
if (h->non_zero_count_cache[scan8[i]] ||
dctcoef_get(h->mb, PIXEL_SHIFT, i * 16))
idct_add(dest[j - 1] + block_offset[i],
h->mb + (i * 16 << PIXEL_SHIFT),
uvlinesize);
if (chroma422) {
for (i = j * 16 + 4; i < j * 16 + 8; i++)
if (h->non_zero_count_cache[scan8[i + 4]] ||
dctcoef_get(h->mb, PIXEL_SHIFT, i * 16))
idct_add(dest[j - 1] + block_offset[i + 4],
h->mb + (i * 16 << PIXEL_SHIFT),
uvlinesize);
}
}
}
} else {
if (is_h264) {
int qp[2];
if (chroma422) {
qp[0] = h->chroma_qp[0] + 3;
qp[1] = h->chroma_qp[1] + 3;
} else {
qp[0] = h->chroma_qp[0];
qp[1] = h->chroma_qp[1];
}
//色度的IDCT
//直流分量的hadamard变换
if (h->non_zero_count_cache[scan8[CHROMA_DC_BLOCK_INDEX + 0]])
h->h264dsp.h264_chroma_dc_dequant_idct(h->mb + (16 * 16 * 1 << PIXEL_SHIFT),
h->dequant4_coeff[IS_INTRA(mb_type) ? 1 : 4][qp[0]][0]);
if (h->non_zero_count_cache[scan8[CHROMA_DC_BLOCK_INDEX + 1]])
h->h264dsp.h264_chroma_dc_dequant_idct(h->mb + (16 * 16 * 2 << PIXEL_SHIFT),
h->dequant4_coeff[IS_INTRA(mb_type) ? 2 : 5][qp[1]][0]);
//IDCT
//最后的“8”代表内部循环处理8次(U,V各4次)
h->h264dsp.h264_idct_add8(dest, block_offset,
h->mb, uvlinesize,
h->non_zero_count_cache);
} else if (CONFIG_SVQ3_DECODER) {
h->h264dsp.h264_chroma_dc_dequant_idct(h->mb + 16 * 16 * 1,
h->dequant4_coeff[IS_INTRA(mb_type) ? 1 : 4][h->chroma_qp[0]][0]);
h->h264dsp.h264_chroma_dc_dequant_idct(h->mb + 16 * 16 * 2,
h->dequant4_coeff[IS_INTRA(mb_type) ? 2 : 5][h->chroma_qp[1]][0]);
for (j = 1; j < 3; j++) {
for (i = j * 16; i < j * 16 + 4; i++)
if (h->non_zero_count_cache[scan8[i]] || h->mb[i * 16]) {
uint8_t *const ptr = dest[j - 1] + block_offset[i];
ff_svq3_add_idct_c(ptr, h->mb + i * 16,
uvlinesize,
ff_h264_chroma_qp[0][h->qscale + 12] - 12, 2);
}
}
}
}
}
}
}
下面简单梳理一下FUNC(hl_decode_mb)的流程(在这里只考虑亮度分量的解码,色度分量的解码过程是类似的):
(1)预测
a)如果是帧内预测宏块(Intra),调用hl_decode_mb_predict_luma()进行帧内预测,得到预测数据。b)如果不是帧内预测宏块(Inter),调用FUNC(hl_motion_420)()或者FUNC(hl_motion_422)()进行帧间预测(即运动补偿),得到预测数据。
(2)残差叠加
a)调用hl_decode_mb_idct_luma()对DCT残差数据进行DCT反变换,获得残差像素数据并且叠加到之前得到的预测数据上,得到最后的图像数据。
PS:该流程中有一个重要的贯穿始终的内存指针dest_y,其指向的内存中存储了解码后的亮度数据。
hl_decode_mb_predict_luma()
hl_decode_mb_predict_luma()对帧内宏块进行帧内预测,它的定义位于libavcodec\h264_mb.c,如下所示。//帧内预测-亮度
//分成2种情况:Intra4x4和Intra16x16
static av_always_inline void hl_decode_mb_predict_luma(H264Context *h,
int mb_type, int is_h264,
int simple,
int transform_bypass,
int pixel_shift,
int *block_offset,
int linesize,
uint8_t *dest_y, int p)
{
//用于DCT反变换
void (*idct_add)(uint8_t *dst, int16_t *block, int stride);
void (*idct_dc_add)(uint8_t *dst, int16_t *block, int stride);
int i;
int qscale = p == 0 ? h->qscale : h->chroma_qp[p - 1];
//外部调用时候p=0
block_offset += 16 * p;
if (IS_INTRA4x4(mb_type)) {
//Intra4x4帧内预测
if (IS_8x8DCT(mb_type)) {
//如果使用了8x8的DCT,先不研究
if (transform_bypass) {
idct_dc_add =
idct_add = h->h264dsp.h264_add_pixels8_clear;
} else {
idct_dc_add = h->h264dsp.h264_idct8_dc_add;
idct_add = h->h264dsp.h264_idct8_add;
}
for (i = 0; i < 16; i += 4) {
uint8_t *const ptr = dest_y + block_offset[i];
const int dir = h->intra4x4_pred_mode_cache[scan8[i]];
if (transform_bypass && h->sps.profile_idc == 244 && dir <= 1) {
if (h->x264_build != -1) {
h->hpc.pred8x8l_add[dir](ptr, h->mb + (i * 16 + p * 256 << pixel_shift), linesize);
} else
h->hpc.pred8x8l_filter_add[dir](ptr, h->mb + (i * 16 + p * 256 << pixel_shift),
(h-> topleft_samples_available << i) & 0x8000,
(h->topright_samples_available << i) & 0x4000, linesize);
} else {
const int nnz = h->non_zero_count_cache[scan8[i + p * 16]];
h->hpc.pred8x8l[dir](ptr, (h->topleft_samples_available << i) & 0x8000,
(h->topright_samples_available << i) & 0x4000, linesize);
if (nnz) {
if (nnz == 1 && dctcoef_get(h->mb, pixel_shift, i * 16 + p * 256))
idct_dc_add(ptr, h->mb + (i * 16 + p * 256 << pixel_shift), linesize);
else
idct_add(ptr, h->mb + (i * 16 + p * 256 << pixel_shift), linesize);
}
}
}
} else {
/*
* Intra4x4帧内预测:16x16 宏块被划分为16个4x4子块
*
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
*
*/
//4x4的IDCT
//transform_bypass=0,不考虑
if (transform_bypass) {
idct_dc_add =
idct_add = h->h264dsp.h264_add_pixels4_clear;
} else {
//常见情况
idct_dc_add = h->h264dsp.h264_idct_dc_add;
idct_add = h->h264dsp.h264_idct_add;
}
//循环4x4=16个DCT块
for (i = 0; i < 16; i++) {
//ptr指向输出的像素数据
uint8_t *const ptr = dest_y + block_offset[i];
//dir存储了帧内预测模式
const int dir = h->intra4x4_pred_mode_cache[scan8[i]];
if (transform_bypass && h->sps.profile_idc == 244 && dir <= 1) {
h->hpc.pred4x4_add[dir](ptr, h->mb + (i * 16 + p * 256 << pixel_shift), linesize);
} else {
uint8_t *topright;
int nnz, tr;
uint64_t tr_high;
//这2种模式特殊的处理?
if (dir == DIAG_DOWN_LEFT_PRED || dir == VERT_LEFT_PRED) {
const int topright_avail = (h->topright_samples_available << i) & 0x8000;
av_assert2(h->mb_y || linesize <= block_offset[i]);
if (!topright_avail) {
if (pixel_shift) {
tr_high = ((uint16_t *)ptr)[3 - linesize / 2] * 0x0001000100010001ULL;
topright = (uint8_t *)&tr_high;
} else {
tr = ptr[3 - linesize] * 0x01010101u;
topright = (uint8_t *)&tr;
}
} else
topright = ptr + (4 << pixel_shift) - linesize;
} else
topright = NULL;
//汇编函数:4x4帧内预测(9种方式:Vertical,Horizontal,DC,Plane等等。。。)
h->hpc.pred4x4[dir](ptr, topright, linesize);
//每个4x4块的非0系数个数的缓存
nnz = h->non_zero_count_cache[scan8[i + p * 16]];
//有非0系数的时候才处理
//h->mb中存储了DCT系数
//输出存储在ptr
if (nnz) {
if (is_h264) {
if (nnz == 1 && dctcoef_get(h->mb, pixel_shift, i * 16 + p * 256))
idct_dc_add(ptr, h->mb + (i * 16 + p * 256 << pixel_shift), linesize);//特殊:AC系数全为0时候调用
else
idct_add(ptr, h->mb + (i * 16 + p * 256 << pixel_shift), linesize);//4x4DCT反变换
} else if (CONFIG_SVQ3_DECODER)
ff_svq3_add_idct_c(ptr, h->mb + i * 16 + p * 256, linesize, qscale, 0);
}
}
}
}
} else {
/*
* Intra16x16帧内预测
*
* +--------+--------+
* | |
* | |
* | |
* + + +
* | |
* | |
* | |
* +--------+--------+
*
*/
//汇编函数:16x16帧内预测(4种方式:Vertical,Horizontal,DC,Plane)
h->hpc.pred16x16[h->intra16x16_pred_mode](dest_y, linesize);
if (is_h264) {
if (h->non_zero_count_cache[scan8[LUMA_DC_BLOCK_INDEX + p]]) {
//有非0系数的时候才处理
//Hadamard反变换
//h->mb中存储了DCT系数
//h->mb_luma_dc中存储了16个DCT的直流分量
if (!transform_bypass)
h->h264dsp.h264_luma_dc_dequant_idct(h->mb + (p * 256 << pixel_shift),
h->mb_luma_dc[p],
h->dequant4_coeff[p][qscale][0]);
//注:此处仅仅进行了Hadamard反变换,并未进行DCT反变换
//Intra16x16在解码过程中的DCT反变换并不是在这里进行,而是在后面进行
else {
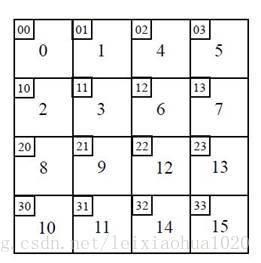
static const uint8_t dc_mapping[16] = {
0 * 16, 1 * 16, 4 * 16, 5 * 16,
2 * 16, 3 * 16, 6 * 16, 7 * 16,
8 * 16, 9 * 16, 12 * 16, 13 * 16,
10 * 16, 11 * 16, 14 * 16, 15 * 16
};
for (i = 0; i < 16; i++)
dctcoef_set(h->mb + (p * 256 << pixel_shift),
pixel_shift, dc_mapping[i],
dctcoef_get(h->mb_luma_dc[p],
pixel_shift, i));
}
}
} else if (CONFIG_SVQ3_DECODER)
ff_svq3_luma_dc_dequant_idct_c(h->mb + p * 256,
h->mb_luma_dc[p], qscale);
}
}
下面根据原代码梳理一下hl_decode_mb_predict_luma()的主干:
(1)如果宏块是4x4帧内预测类型(Intra4x4),作如下处理:
a)循环遍历16个4x4的块,并作如下处理:
i.从intra4x4_pred_mode_cache中读取4x4帧内预测方法ii.根据帧内预测方法调用H264PredContext中的汇编函数pred4x4()进行帧内预测iii.调用H264DSPContext中的汇编函数h264_idct_add()对DCT残差数据进行4x4DCT反变换;如果DCT系数中不包含AC系数的话,则调用汇编函数h264_idct_dc_add()对残差数据进行4x4DCT反变换(速度更快)。
(2)如果宏块是16x16帧内预测类型(Intra4x4),作如下处理:
在这里需要注意,帧内4x4的宏块在执行完hl_decode_mb_predict_luma()之后实际上已经完成了“帧内预测+DCT反变换”的流程(解码完成);而帧内16x16的宏块在执行完hl_decode_mb_predict_luma()之后仅仅完成了“帧内预测+Hadamard反变换”的流程,而并未进行“DCT反变换”的步骤,这一步骤需要在后续步骤中完成。a)通过intra16x16_pred_mode获得16x16帧内预测方法b)根据帧内预测方法调用H264PredContext中的汇编函数pred16x16 ()进行帧内预测c)调用H264DSPContext中的汇编函数h264_luma_dc_dequant_idct ()对16个小块的DC系数进行Hadamard反变换
下文记录上述流程中涉及到的汇编函数(此处暂不记录DCT反变换的函数,在后文中再进行叙述):
4x4帧内预测汇编函数:H264PredContext -> pred4x4[dir]()
16x16帧内预测汇编函数:H264PredContext -> pred16x16[dir]()
Hadamard反变换汇编函数:H264DSPContext->h264_luma_dc_dequant_idct()
帧内预测小知识
帧内预测根据宏块左边和上边的边界像素值推算宏块内部的像素值,帧内预测的效果如下图所示。其中左边的图为图像原始画面,右边的图为经过帧内预测后没有叠加残差的画面。
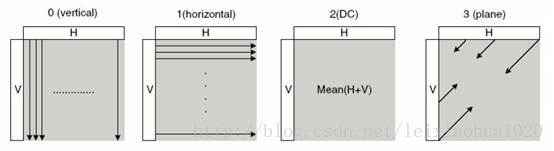
模式 | 描述 |
Vertical | 由上边像素推出相应像素值 |
Horizontal | 由左边像素推出相应像素值 |
DC | 由上边和左边像素平均值推出相应像素值 |
Plane | 由上边和左边像素推出相应像素值 |
4x4帧内预测模式一共有9种,如下图所示。
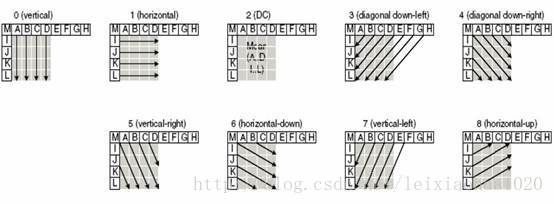
从图中可以看出,这9种模式中前4种和16x16帧内预测方法是一样的。后面增加了几种独特的方向——箭头不再位于“口”中,而是位于“日”中。
帧内预测汇编函数的初始化
FFmpeg H.264解码器中4x4帧内预测函数指针位于H264PredContext的pred4x4[]数组中,其中每一个元素指向一种4x4帧内预测模式。而16x16帧内预测函数指针位于H264PredContext的pred16x16[]数组中,其中每一个元素指向一种16x16帧内预测模式。在FFmpeg H.264解码器初始化的时候,会调用ff_h264_pred_init()根据系统的配置对H264PredContext中的这些帧内预测函数指针进行赋值。下面简单看一下ff_h264_pred_init()的定义。
ff_h264_pred_init()
ff_h264_pred_init()的定义位于libavcodec\h264pred.c,如下所示。/**
* Set the intra prediction function pointers.
*/
//初始化帧内预测相关的汇编函数
av_cold void ff_h264_pred_init(H264PredContext *h, int codec_id,
const int bit_depth,
int chroma_format_idc)
{
#undef FUNC
#undef FUNCC
#define FUNC(a, depth) a ## _ ## depth
#define FUNCC(a, depth) a ## _ ## depth ## _c
#define FUNCD(a) a ## _c
//好长的宏定义...(这种很长的宏定义在H.264解码器中似乎很普遍!)
//该宏用于给帧内预测模块的函数指针赋值
//注意参数为颜色位深度
#define H264_PRED(depth) \
if(codec_id != AV_CODEC_ID_RV40){\
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8) {\
h->pred4x4[VERT_PRED ]= FUNCD(pred4x4_vertical_vp8);\
h->pred4x4[HOR_PRED ]= FUNCD(pred4x4_horizontal_vp8);\
} else {\
h->pred4x4[VERT_PRED ]= FUNCC(pred4x4_vertical , depth);\
h->pred4x4[HOR_PRED ]= FUNCC(pred4x4_horizontal , depth);\
}\
h->pred4x4[DC_PRED ]= FUNCC(pred4x4_dc , depth);\
if(codec_id == AV_CODEC_ID_SVQ3)\
h->pred4x4[DIAG_DOWN_LEFT_PRED ]= FUNCD(pred4x4_down_left_svq3);\
else\
h->pred4x4[DIAG_DOWN_LEFT_PRED ]= FUNCC(pred4x4_down_left , depth);\
h->pred4x4[DIAG_DOWN_RIGHT_PRED]= FUNCC(pred4x4_down_right , depth);\
h->pred4x4[VERT_RIGHT_PRED ]= FUNCC(pred4x4_vertical_right , depth);\
h->pred4x4[HOR_DOWN_PRED ]= FUNCC(pred4x4_horizontal_down , depth);\
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8) {\
h->pred4x4[VERT_LEFT_PRED ]= FUNCD(pred4x4_vertical_left_vp8);\
} else\
h->pred4x4[VERT_LEFT_PRED ]= FUNCC(pred4x4_vertical_left , depth);\
h->pred4x4[HOR_UP_PRED ]= FUNCC(pred4x4_horizontal_up , depth);\
if (codec_id != AV_CODEC_ID_VP7 && codec_id != AV_CODEC_ID_VP8) {\
h->pred4x4[LEFT_DC_PRED ]= FUNCC(pred4x4_left_dc , depth);\
h->pred4x4[TOP_DC_PRED ]= FUNCC(pred4x4_top_dc , depth);\
} else {\
h->pred4x4[TM_VP8_PRED ]= FUNCD(pred4x4_tm_vp8);\
h->pred4x4[DC_127_PRED ]= FUNCC(pred4x4_127_dc , depth);\
h->pred4x4[DC_129_PRED ]= FUNCC(pred4x4_129_dc , depth);\
h->pred4x4[VERT_VP8_PRED ]= FUNCC(pred4x4_vertical , depth);\
h->pred4x4[HOR_VP8_PRED ]= FUNCC(pred4x4_horizontal , depth);\
}\
if (codec_id != AV_CODEC_ID_VP8)\
h->pred4x4[DC_128_PRED ]= FUNCC(pred4x4_128_dc , depth);\
}else{\
h->pred4x4[VERT_PRED ]= FUNCC(pred4x4_vertical , depth);\
h->pred4x4[HOR_PRED ]= FUNCC(pred4x4_horizontal , depth);\
h->pred4x4[DC_PRED ]= FUNCC(pred4x4_dc , depth);\
h->pred4x4[DIAG_DOWN_LEFT_PRED ]= FUNCD(pred4x4_down_left_rv40);\
h->pred4x4[DIAG_DOWN_RIGHT_PRED]= FUNCC(pred4x4_down_right , depth);\
h->pred4x4[VERT_RIGHT_PRED ]= FUNCC(pred4x4_vertical_right , depth);\
h->pred4x4[HOR_DOWN_PRED ]= FUNCC(pred4x4_horizontal_down , depth);\
h->pred4x4[VERT_LEFT_PRED ]= FUNCD(pred4x4_vertical_left_rv40);\
h->pred4x4[HOR_UP_PRED ]= FUNCD(pred4x4_horizontal_up_rv40);\
h->pred4x4[LEFT_DC_PRED ]= FUNCC(pred4x4_left_dc , depth);\
h->pred4x4[TOP_DC_PRED ]= FUNCC(pred4x4_top_dc , depth);\
h->pred4x4[DC_128_PRED ]= FUNCC(pred4x4_128_dc , depth);\
h->pred4x4[DIAG_DOWN_LEFT_PRED_RV40_NODOWN]= FUNCD(pred4x4_down_left_rv40_nodown);\
h->pred4x4[HOR_UP_PRED_RV40_NODOWN]= FUNCD(pred4x4_horizontal_up_rv40_nodown);\
h->pred4x4[VERT_LEFT_PRED_RV40_NODOWN]= FUNCD(pred4x4_vertical_left_rv40_nodown);\
}\
\
h->pred8x8l[VERT_PRED ]= FUNCC(pred8x8l_vertical , depth);\
h->pred8x8l[HOR_PRED ]= FUNCC(pred8x8l_horizontal , depth);\
h->pred8x8l[DC_PRED ]= FUNCC(pred8x8l_dc , depth);\
h->pred8x8l[DIAG_DOWN_LEFT_PRED ]= FUNCC(pred8x8l_down_left , depth);\
h->pred8x8l[DIAG_DOWN_RIGHT_PRED]= FUNCC(pred8x8l_down_right , depth);\
h->pred8x8l[VERT_RIGHT_PRED ]= FUNCC(pred8x8l_vertical_right , depth);\
h->pred8x8l[HOR_DOWN_PRED ]= FUNCC(pred8x8l_horizontal_down , depth);\
h->pred8x8l[VERT_LEFT_PRED ]= FUNCC(pred8x8l_vertical_left , depth);\
h->pred8x8l[HOR_UP_PRED ]= FUNCC(pred8x8l_horizontal_up , depth);\
h->pred8x8l[LEFT_DC_PRED ]= FUNCC(pred8x8l_left_dc , depth);\
h->pred8x8l[TOP_DC_PRED ]= FUNCC(pred8x8l_top_dc , depth);\
h->pred8x8l[DC_128_PRED ]= FUNCC(pred8x8l_128_dc , depth);\
\
if (chroma_format_idc <= 1) {\
h->pred8x8[VERT_PRED8x8 ]= FUNCC(pred8x8_vertical , depth);\
h->pred8x8[HOR_PRED8x8 ]= FUNCC(pred8x8_horizontal , depth);\
} else {\
h->pred8x8[VERT_PRED8x8 ]= FUNCC(pred8x16_vertical , depth);\
h->pred8x8[HOR_PRED8x8 ]= FUNCC(pred8x16_horizontal , depth);\
}\
if (codec_id != AV_CODEC_ID_VP7 && codec_id != AV_CODEC_ID_VP8) {\
if (chroma_format_idc <= 1) {\
h->pred8x8[PLANE_PRED8x8]= FUNCC(pred8x8_plane , depth);\
} else {\
h->pred8x8[PLANE_PRED8x8]= FUNCC(pred8x16_plane , depth);\
}\
} else\
h->pred8x8[PLANE_PRED8x8]= FUNCD(pred8x8_tm_vp8);\
if (codec_id != AV_CODEC_ID_RV40 && codec_id != AV_CODEC_ID_VP7 && \
codec_id != AV_CODEC_ID_VP8) {\
if (chroma_format_idc <= 1) {\
h->pred8x8[DC_PRED8x8 ]= FUNCC(pred8x8_dc , depth);\
h->pred8x8[LEFT_DC_PRED8x8]= FUNCC(pred8x8_left_dc , depth);\
h->pred8x8[TOP_DC_PRED8x8 ]= FUNCC(pred8x8_top_dc , depth);\
h->pred8x8[ALZHEIMER_DC_L0T_PRED8x8 ]= FUNC(pred8x8_mad_cow_dc_l0t, depth);\
h->pred8x8[ALZHEIMER_DC_0LT_PRED8x8 ]= FUNC(pred8x8_mad_cow_dc_0lt, depth);\
h->pred8x8[ALZHEIMER_DC_L00_PRED8x8 ]= FUNC(pred8x8_mad_cow_dc_l00, depth);\
h->pred8x8[ALZHEIMER_DC_0L0_PRED8x8 ]= FUNC(pred8x8_mad_cow_dc_0l0, depth);\
} else {\
h->pred8x8[DC_PRED8x8 ]= FUNCC(pred8x16_dc , depth);\
h->pred8x8[LEFT_DC_PRED8x8]= FUNCC(pred8x16_left_dc , depth);\
h->pred8x8[TOP_DC_PRED8x8 ]= FUNCC(pred8x16_top_dc , depth);\
h->pred8x8[ALZHEIMER_DC_L0T_PRED8x8 ]= FUNC(pred8x16_mad_cow_dc_l0t, depth);\
h->pred8x8[ALZHEIMER_DC_0LT_PRED8x8 ]= FUNC(pred8x16_mad_cow_dc_0lt, depth);\
h->pred8x8[ALZHEIMER_DC_L00_PRED8x8 ]= FUNC(pred8x16_mad_cow_dc_l00, depth);\
h->pred8x8[ALZHEIMER_DC_0L0_PRED8x8 ]= FUNC(pred8x16_mad_cow_dc_0l0, depth);\
}\
}else{\
h->pred8x8[DC_PRED8x8 ]= FUNCD(pred8x8_dc_rv40);\
h->pred8x8[LEFT_DC_PRED8x8]= FUNCD(pred8x8_left_dc_rv40);\
h->pred8x8[TOP_DC_PRED8x8 ]= FUNCD(pred8x8_top_dc_rv40);\
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8) {\
h->pred8x8[DC_127_PRED8x8]= FUNCC(pred8x8_127_dc , depth);\
h->pred8x8[DC_129_PRED8x8]= FUNCC(pred8x8_129_dc , depth);\
}\
}\
if (chroma_format_idc <= 1) {\
h->pred8x8[DC_128_PRED8x8 ]= FUNCC(pred8x8_128_dc , depth);\
} else {\
h->pred8x8[DC_128_PRED8x8 ]= FUNCC(pred8x16_128_dc , depth);\
}\
\
h->pred16x16[DC_PRED8x8 ]= FUNCC(pred16x16_dc , depth);\
h->pred16x16[VERT_PRED8x8 ]= FUNCC(pred16x16_vertical , depth);\
h->pred16x16[HOR_PRED8x8 ]= FUNCC(pred16x16_horizontal , depth);\
switch(codec_id){\
case AV_CODEC_ID_SVQ3:\
h->pred16x16[PLANE_PRED8x8 ]= FUNCD(pred16x16_plane_svq3);\
break;\
case AV_CODEC_ID_RV40:\
h->pred16x16[PLANE_PRED8x8 ]= FUNCD(pred16x16_plane_rv40);\
break;\
case AV_CODEC_ID_VP7:\
case AV_CODEC_ID_VP8:\
h->pred16x16[PLANE_PRED8x8 ]= FUNCD(pred16x16_tm_vp8);\
h->pred16x16[DC_127_PRED8x8]= FUNCC(pred16x16_127_dc , depth);\
h->pred16x16[DC_129_PRED8x8]= FUNCC(pred16x16_129_dc , depth);\
break;\
default:\
h->pred16x16[PLANE_PRED8x8 ]= FUNCC(pred16x16_plane , depth);\
break;\
}\
h->pred16x16[LEFT_DC_PRED8x8]= FUNCC(pred16x16_left_dc , depth);\
h->pred16x16[TOP_DC_PRED8x8 ]= FUNCC(pred16x16_top_dc , depth);\
h->pred16x16[DC_128_PRED8x8 ]= FUNCC(pred16x16_128_dc , depth);\
\
/* special lossless h/v prediction for h264 */ \
h->pred4x4_add [VERT_PRED ]= FUNCC(pred4x4_vertical_add , depth);\
h->pred4x4_add [ HOR_PRED ]= FUNCC(pred4x4_horizontal_add , depth);\
h->pred8x8l_add [VERT_PRED ]= FUNCC(pred8x8l_vertical_add , depth);\
h->pred8x8l_add [ HOR_PRED ]= FUNCC(pred8x8l_horizontal_add , depth);\
h->pred8x8l_filter_add [VERT_PRED ]= FUNCC(pred8x8l_vertical_filter_add , depth);\
h->pred8x8l_filter_add [ HOR_PRED ]= FUNCC(pred8x8l_horizontal_filter_add , depth);\
if (chroma_format_idc <= 1) {\
h->pred8x8_add [VERT_PRED8x8]= FUNCC(pred8x8_vertical_add , depth);\
h->pred8x8_add [ HOR_PRED8x8]= FUNCC(pred8x8_horizontal_add , depth);\
} else {\
h->pred8x8_add [VERT_PRED8x8]= FUNCC(pred8x16_vertical_add , depth);\
h->pred8x8_add [ HOR_PRED8x8]= FUNCC(pred8x16_horizontal_add , depth);\
}\
h->pred16x16_add[VERT_PRED8x8]= FUNCC(pred16x16_vertical_add , depth);\
h->pred16x16_add[ HOR_PRED8x8]= FUNCC(pred16x16_horizontal_add , depth);\
//注意这里使用了前面那个很长的宏定义
//根据颜色位深的不同,初始化不同的函数
//颜色位深默认值为8,所以一般情况下调用H264_PRED(8)
switch (bit_depth) {
case 9:
H264_PRED(9)
break;
case 10:
H264_PRED(10)
break;
case 12:
H264_PRED(12)
break;
case 14:
H264_PRED(14)
break;
default:
av_assert0(bit_depth<=8);
H264_PRED(8)
break;
}
//如果支持汇编优化,则会调用相应的汇编优化函数
//neon这些的
if (ARCH_ARM) ff_h264_pred_init_arm(h, codec_id, bit_depth, chroma_format_idc);
//mmx这些的
if (ARCH_X86) ff_h264_pred_init_x86(h, codec_id, bit_depth, chroma_format_idc);
}
从源代码可以看出,ff_h264_pred_init()函数中包含一个名为“H264_PRED(depth)”的很长的宏定义。该宏定义中包含了C语言版本的帧内预测函数的初始化代码。ff_h264_pred_init()会根据系统的颜色位深bit_depth初始化相应的C语言版本的帧内预测函数。在函数的末尾则包含了汇编函数的初始化函数:如果系统是ARM架构的,则会调用ff_h264_pred_init_arm()初始化ARM平台下经过汇编优化的帧内预测函数;如果系统是X86架构的,则会调用ff_h264_pred_init_x86()初始化X86平台下经过汇编优化的帧内预测函数。
下面看一下C语言版本的帧内预测函数。
C语言版本帧内预测函数
“H264_PRED(depth)”宏用于初始化C语言版本的帧内预测函数。其中“depth”表示颜色位深。以最常见的8bit位深为例,展开“H264_PRED(8)”宏定义之后的代码如下所示。if(codec_id != AV_CODEC_ID_RV40){
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8) {
h->pred4x4[0 ]= pred4x4_vertical_vp8_c;
h->pred4x4[1 ]= pred4x4_horizontal_vp8_c;
} else {
//帧内4x4的Vertical预测方式
h->pred4x4[0 ]= pred4x4_vertical_8_c;
//帧内4x4的Horizontal预测方式
h->pred4x4[1 ]= pred4x4_horizontal_8_c;
}
//帧内4x4的DC预测方式
h->pred4x4[2 ]= pred4x4_dc_8_c;
if(codec_id == AV_CODEC_ID_SVQ3)
h->pred4x4[3 ]= pred4x4_down_left_svq3_c;
else
h->pred4x4[3 ]= pred4x4_down_left_8_c;
h->pred4x4[4]= pred4x4_down_right_8_c;
h->pred4x4[5 ]= pred4x4_vertical_right_8_c;
h->pred4x4[6 ]= pred4x4_horizontal_down_8_c;
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8) {
h->pred4x4[7 ]= pred4x4_vertical_left_vp8_c;
} else
h->pred4x4[7 ]= pred4x4_vertical_left_8_c;
h->pred4x4[8 ]= pred4x4_horizontal_up_8_c;
if (codec_id != AV_CODEC_ID_VP7 && codec_id != AV_CODEC_ID_VP8) {
h->pred4x4[9 ]= pred4x4_left_dc_8_c;
h->pred4x4[10 ]= pred4x4_top_dc_8_c;
} else {
h->pred4x4[9 ]= pred4x4_tm_vp8_c;
h->pred4x4[12 ]= pred4x4_127_dc_8_c;
h->pred4x4[13 ]= pred4x4_129_dc_8_c;
h->pred4x4[10 ]= pred4x4_vertical_8_c;
h->pred4x4[14 ]= pred4x4_horizontal_8_c;
}
if (codec_id != AV_CODEC_ID_VP8)
h->pred4x4[11 ]= pred4x4_128_dc_8_c;
}else{
h->pred4x4[0 ]= pred4x4_vertical_8_c;
h->pred4x4[1 ]= pred4x4_horizontal_8_c;
h->pred4x4[2 ]= pred4x4_dc_8_c;
h->pred4x4[3 ]= pred4x4_down_left_rv40_c;
h->pred4x4[4]= pred4x4_down_right_8_c;
h->pred4x4[5 ]= pred4x4_vertical_right_8_c;
h->pred4x4[6 ]= pred4x4_horizontal_down_8_c;
h->pred4x4[7 ]= pred4x4_vertical_left_rv40_c;
h->pred4x4[8 ]= pred4x4_horizontal_up_rv40_c;
h->pred4x4[9 ]= pred4x4_left_dc_8_c;
h->pred4x4[10 ]= pred4x4_top_dc_8_c;
h->pred4x4[11 ]= pred4x4_128_dc_8_c;
h->pred4x4[12]= pred4x4_down_left_rv40_nodown_c;
h->pred4x4[13]= pred4x4_horizontal_up_rv40_nodown_c;
h->pred4x4[14]= pred4x4_vertical_left_rv40_nodown_c;
}
h->pred8x8l[0 ]= pred8x8l_vertical_8_c;
h->pred8x8l[1 ]= pred8x8l_horizontal_8_c;
h->pred8x8l[2 ]= pred8x8l_dc_8_c;
h->pred8x8l[3 ]= pred8x8l_down_left_8_c;
h->pred8x8l[4]= pred8x8l_down_right_8_c;
h->pred8x8l[5 ]= pred8x8l_vertical_right_8_c;
h->pred8x8l[6 ]= pred8x8l_horizontal_down_8_c;
h->pred8x8l[7 ]= pred8x8l_vertical_left_8_c;
h->pred8x8l[8 ]= pred8x8l_horizontal_up_8_c;
h->pred8x8l[9 ]= pred8x8l_left_dc_8_c;
h->pred8x8l[10 ]= pred8x8l_top_dc_8_c;
h->pred8x8l[11 ]= pred8x8l_128_dc_8_c;
if (chroma_format_idc <= 1) {
h->pred8x8[2 ]= pred8x8_vertical_8_c;
h->pred8x8[1 ]= pred8x8_horizontal_8_c;
} else {
h->pred8x8[2 ]= pred8x16_vertical_8_c;
h->pred8x8[1 ]= pred8x16_horizontal_8_c;
}
if (codec_id != AV_CODEC_ID_VP7 && codec_id != AV_CODEC_ID_VP8) {
if (chroma_format_idc <= 1) {
h->pred8x8[3]= pred8x8_plane_8_c;
} else {
h->pred8x8[3]= pred8x16_plane_8_c;
}
} else
h->pred8x8[3]= pred8x8_tm_vp8_c;
if (codec_id != AV_CODEC_ID_RV40 && codec_id != AV_CODEC_ID_VP7 &&
codec_id != AV_CODEC_ID_VP8) {
if (chroma_format_idc <= 1) {
h->pred8x8[0 ]= pred8x8_dc_8_c;
h->pred8x8[4]= pred8x8_left_dc_8_c;
h->pred8x8[5 ]= pred8x8_top_dc_8_c;
h->pred8x8[7 ]= pred8x8_mad_cow_dc_l0t_8;
h->pred8x8[8 ]= pred8x8_mad_cow_dc_0lt_8;
h->pred8x8[9 ]= pred8x8_mad_cow_dc_l00_8;
h->pred8x8[10 ]= pred8x8_mad_cow_dc_0l0_8;
} else {
h->pred8x8[0 ]= pred8x16_dc_8_c;
h->pred8x8[4]= pred8x16_left_dc_8_c;
h->pred8x8[5 ]= pred8x16_top_dc_8_c;
h->pred8x8[7 ]= pred8x16_mad_cow_dc_l0t_8;
h->pred8x8[8 ]= pred8x16_mad_cow_dc_0lt_8;
h->pred8x8[9 ]= pred8x16_mad_cow_dc_l00_8;
h->pred8x8[10 ]= pred8x16_mad_cow_dc_0l0_8;
}
}else{
h->pred8x8[0 ]= pred8x8_dc_rv40_c;
h->pred8x8[4]= pred8x8_left_dc_rv40_c;
h->pred8x8[5 ]= pred8x8_top_dc_rv40_c;
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8) {
h->pred8x8[7]= pred8x8_127_dc_8_c;
h->pred8x8[8]= pred8x8_129_dc_8_c;
}
}
if (chroma_format_idc <= 1) {
h->pred8x8[6 ]= pred8x8_128_dc_8_c;
} else {
h->pred8x8[6 ]= pred8x16_128_dc_8_c;
}
h->pred16x16[0 ]= pred16x16_dc_8_c;
h->pred16x16[2 ]= pred16x16_vertical_8_c;
h->pred16x16[1 ]= pred16x16_horizontal_8_c;
switch(codec_id){
case AV_CODEC_ID_SVQ3:
h->pred16x16[3 ]= pred16x16_plane_svq3_c;
break;
case AV_CODEC_ID_RV40:
h->pred16x16[3 ]= pred16x16_plane_rv40_c;
break;
case AV_CODEC_ID_VP7:
case AV_CODEC_ID_VP8:
h->pred16x16[3 ]= pred16x16_tm_vp8_c;
h->pred16x16[7]= pred16x16_127_dc_8_c;
h->pred16x16[8]= pred16x16_129_dc_8_c;
break;
default:
h->pred16x16[3 ]= pred16x16_plane_8_c;
break;
}
h->pred16x16[4]= pred16x16_left_dc_8_c;
h->pred16x16[5 ]= pred16x16_top_dc_8_c;
h->pred16x16[6 ]= pred16x16_128_dc_8_c;
/* special lossless h/v prediction for h264 */
h->pred4x4_add [0 ]= pred4x4_vertical_add_8_c;
h->pred4x4_add [ 1 ]= pred4x4_horizontal_add_8_c;
h->pred8x8l_add [0 ]= pred8x8l_vertical_add_8_c;
h->pred8x8l_add [ 1 ]= pred8x8l_horizontal_add_8_c;
h->pred8x8l_filter_add [0 ]= pred8x8l_vertical_filter_add_8_c;
h->pred8x8l_filter_add [ 1 ]= pred8x8l_horizontal_filter_add_8_c;
if (chroma_format_idc <= 1) {
h->pred8x8_add [2]= pred8x8_vertical_add_8_c;
h->pred8x8_add [ 1]= pred8x8_horizontal_add_8_c;
} else {
h->pred8x8_add [2]= pred8x16_vertical_add_8_c;
h->pred8x8_add [ 1]= pred8x16_horizontal_add_8_c;
}
h->pred16x16_add[2]= pred16x16_vertical_add_8_c;
h->pred16x16_add[ 1]= pred16x16_horizontal_add_8_c;
可以看出在H264_PRED(8)展开后的代码中,帧内预测模块的函数指针都被赋值以xxxx_8_c()的函数。例如pred4x4[0](帧内4x4的模式0)被赋值以pred4x4_vertical_8_c();pred4x4[1](帧内4x4的模式1)被赋值以pred4x4_horizontal_8_c();pred4x4[2](帧内4x4的模式2)被赋值以pred4x4_cd_8_c(),如下所示。
//帧内4x4的Vertical预测方式
h->pred4x4[0]= pred4x4_vertical_8_c;
//帧内4x4的Horizontal预测方式
h->pred4x4[1]= pred4x4_horizontal_8_c;
//帧内4x4的DC预测方式
h->pred4x4[2]= pred4x4_dc_8_c;下面看一下这些4x4帧内预测函数的代码。
4x4帧内预测汇编函数:H264PredContext -> pred4x4[dir]()
4x4帧内预测函数指针位于H264PredContext的pred4x4[]数组中。pred4x4[]数组中每一个元素指向一种帧内预测模式。上文中提到的3个帧内预测函数实现的帧内预测功能如下图所示。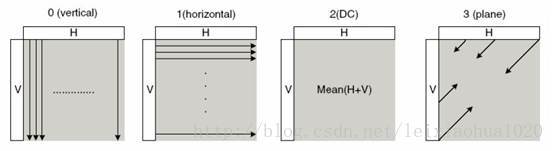
pred4x4_vertical_8_c()
pred4x4_vertical_8_c()实现了4x4块Vertical模式的帧内预测,该函数的定义位于libavcodec\h264pred_template.c,如下所示。/* 帧内预测
*
* 注释:雷霄骅
* leixiaohua1020@126.com
* http://blog.csdn.net/leixiaohua1020
*
* 参数:
* _src:输入数据
* _stride:一行像素的大小
*
*/
//垂直预测
//由上边像素推出像素值
static void FUNCC(pred4x4_vertical)(uint8_t *_src, const uint8_t *topright,
ptrdiff_t _stride)
{
pixel *src = (pixel*)_src;
int stride = _stride>>(sizeof(pixel)-1);
/*
* Vertical预测方式
* |X1 X2 X3 X4
* --+-----------
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
*
*/
//pixel4代表4个像素值。1个像素值占用8bit,4个像素值占用32bit。
const pixel4 a= AV_RN4PA(src-stride);
/* 宏定义展开后:
* const uint32_t a=(((const av_alias32*)(src-stride))->u32);
* 注:av_alias32是一个union类型的变量,存储4byte数据。
* -stride代表了上一行对应位置的像素
* 即a取的是上1行像素的值。
*/
AV_WN4PA(src+0*stride, a);
AV_WN4PA(src+1*stride, a);
AV_WN4PA(src+2*stride, a);
AV_WN4PA(src+3*stride, a);
/* 宏定义展开后:
* (((av_alias32*)(src+0*stride))->u32 = (a));
* (((av_alias32*)(src+1*stride))->u32 = (a));
* (((av_alias32*)(src+2*stride))->u32 = (a));
* (((av_alias32*)(src+3*stride))->u32 = (a));
* 即把a的值赋给下面4行。
*/
}
从源代码可以看出,pred4x4_vertical_8_c()首先取了当前4x4块上一行的4个像素存入a变量,然后将a变量的值分别赋值给了当前块的4行。在这一有一点要注意:stride代表了一行像素的大小,“src+stride”代表了位于src正下方的像素。
pred4x4_horizontal_8_c()
pred4x4_horizontal_8_c()实现了4x4块Horizontal模式的帧内预测,该函数的定义位于libavcodec\h264pred_template.c,如下所示。//水平预测
//由左边像素推出像素值
static void FUNCC(pred4x4_horizontal)(uint8_t *_src, const uint8_t *topright,
ptrdiff_t _stride)
{
pixel *src = (pixel*)_src;
int stride = _stride>>(sizeof(pixel)-1);
/*
* Horizontal预测方式
* |
* --+-----------
* X5|X5 X5 X5 X5
* X6|X6 X6 X6 X6
* X7|X7 X7 X7 X7
* X8|X8 X8 X8 X8
*
*/
AV_WN4PA(src+0*stride, PIXEL_SPLAT_X4(src[-1+0*stride]));
AV_WN4PA(src+1*stride, PIXEL_SPLAT_X4(src[-1+1*stride]));
AV_WN4PA(src+2*stride, PIXEL_SPLAT_X4(src[-1+2*stride]));
AV_WN4PA(src+3*stride, PIXEL_SPLAT_X4(src[-1+3*stride]));
/* 宏定义展开后:
* (((av_alias32*)(src+0*stride))->u32 = (((src[-1+0*stride])*0x01010101U)));
* (((av_alias32*)(src+1*stride))->u32 = (((src[-1+1*stride])*0x01010101U)));
* (((av_alias32*)(src+2*stride))->u32 = (((src[-1+2*stride])*0x01010101U)));
* (((av_alias32*)(src+3*stride))->u32 = (((src[-1+3*stride])*0x01010101U)));
*
* PIXEL_SPLAT_X4()的作用应该是把最后一个像素(最后8位)拷贝给前面3个像素(前24位)
* 即把0x0100009F变成0x9F9F9F9F
* 推导:
* 前提是x占8bit(对应1个像素)
* y=x*0x01010101
* =x*(0x00000001+0x00000100+0x00010000+0x01000000)
* =x<<0+x<<8+x<<16+x<<24
*
* 每行把src[-1]中像素值例如0x02赋值给src[0]开始的4个像素中,形成0x02020202
*/
}
从源代码可以看出,pred4x4_horizontal_8_c()将4x4块每行像素左边的一个像素拷贝了4份之后赋值给了当前行。其中PIXEL_SPLAT_X4()宏的定义如下:
# define PIXEL_SPLAT_X4(x) ((x)*0x01010101U)pred4x4_dc_8_c()
pred4x4_dc_8_c()实现了4x4块DC模式的帧内预测,该函数的定义位于libavcodec\h264pred_template.c,如下所示。//DC预测
//由左边和上边像素平均值推出像素值
static void FUNCC(pred4x4_dc)(uint8_t *_src, const uint8_t *topright,
ptrdiff_t _stride)
{
pixel *src = (pixel*)_src;
int stride = _stride>>(sizeof(pixel)-1);
/*
* DC预测方式
* |X1 X2 X3 X4
* --+-----------
* X5|
* X6| Y
* X7|
* X8|
*
* Y=(X1+X2+X3+X4+X5+X6+X7+X8)/8
*/
const int dc= ( src[-stride] + src[1-stride] + src[2-stride] + src[3-stride]
+ src[-1+0*stride] + src[-1+1*stride] + src[-1+2*stride] + src[-1+3*stride] + 4) >>3;
const pixel4 a = PIXEL_SPLAT_X4(dc);
AV_WN4PA(src+0*stride, a);
AV_WN4PA(src+1*stride, a);
AV_WN4PA(src+2*stride, a);
AV_WN4PA(src+3*stride, a);
/* 宏定义展开后:
* (((av_alias32*)(src+0*stride))->u32 = (a))
* (((av_alias32*)(src+1*stride))->u32 = (a))
* (((av_alias32*)(src+2*stride))->u32 = (a))
* (((av_alias32*)(src+3*stride))->u32 = (a))
*/
}
从源代码可以看出,pred4x4_dc_8_c()将4x4块左边和上边8个点的像素值相加后取了平均值,然后赋值到该4x4块中的所有像素点上。
分析完4x4帧内预测模式的C语言函数之后,我们再看一下16x16帧内预测模式的C语言函数。
16x16帧内预测汇编函数:H264PredContext -> pred16x16[dir] ()
16x16帧内预测模式一共有4种。它们的效果和4x4帧内预测是类似的,如下所示。
pred16x16_vertical_8_c()
下面举例看一个16x16帧内预测Vertical模式的C语言函数pred16x16_vertical_8_c(),如下所示。//垂直预测
//由上面的函数推出像素值
static void FUNCC(pred16x16_vertical)(uint8_t *_src, ptrdiff_t _stride)
{
/*
* Vertical预测方式
* |X1 X2 X3 X4
* --+-----------
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
*
*/
int i;
pixel *src = (pixel*)_src;
int stride = _stride>>(sizeof(pixel)-1);
//pixel4实际上就是uint32_t,存储4个像素的值(每个像素8bit)
//src-stride表示取上面一行像素的值
//在这里取了16个像素的值,分别存入a,b,c,d四个变量
const pixel4 a = AV_RN4PA(((pixel4*)(src-stride))+0);
const pixel4 b = AV_RN4PA(((pixel4*)(src-stride))+1);
const pixel4 c = AV_RN4PA(((pixel4*)(src-stride))+2);
const pixel4 d = AV_RN4PA(((pixel4*)(src-stride))+3);
//循环16行
for(i=0; i<16; i++){
//分别赋值每行(每次赋值4个像素,赋值4次)
AV_WN4PA(((pixel4*)(src+i*stride))+0, a);
AV_WN4PA(((pixel4*)(src+i*stride))+1, b);
AV_WN4PA(((pixel4*)(src+i*stride))+2, c);
AV_WN4PA(((pixel4*)(src+i*stride))+3, d);
}
}
可以看出pred16x16_vertical_8_c()首先取了16x16块上面的一行像素(16个像素),然后循环16次分别赋值给了宏块的16行。
Hadamard反变换汇编函数:H264DSPContext->h264_luma_dc_dequant_idct()
在记录Hadamard反变换的源代码之前,先简单记录Hadamard变换的原理。
Hadamard变换小知识
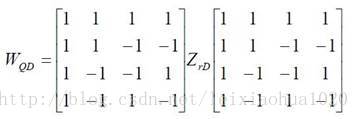
在H.264标准中,如果当前处理的图像宏块是色度块或帧内 16x16模式的亮度块,则需要在DCT变换后将其中各图像块的DCT变换系数矩阵W 中的DC系数按对应图像块顺序排序,组成新的矩阵Wd,再对Wd进行Hadamard 变换及量化。Hadamard变换的公式如下所示。
Hadamard反变换的C语言版本函数
FFmpeg H.264解码器中Hadamard反变换的函数指针是H264DSPContext的h264_luma_dc_dequant_idct()。在初始化的时候,其指向ff_h264_chroma_dc_dequant_idct_8_c()函数。下面看一下该函数的定义。
ff_h264_chroma_dc_dequant_idct_8_c()
ff_h264_chroma_dc_dequant_idct_8_c()完成了Hadamard反变换,其定义位于libavcodec\h264idct_template.c,如下所示。/**
* IDCT transforms the 16 dc values and dequantizes them.
* @param qmul quantization parameter
*/
//DCT直流系数的Hadamard反变换-亮度
//16x16宏块中一共有16个4x4的图像块,因此包含了16个DCT直流系数
//
void FUNCC(ff_h264_luma_dc_dequant_idct)(int16_t *_output, int16_t *_input, int qmul){
#define stride 16
int i;
int temp[16];
static const uint8_t x_offset[4]={0, 2*stride, 8*stride, 10*stride};
dctcoef *input = (dctcoef*)_input;
dctcoef *output = (dctcoef*)_output;
for(i=0; i<4; i++){
const int z0= input[4*i+0] + input[4*i+1];
const int z1= input[4*i+0] - input[4*i+1];
const int z2= input[4*i+2] - input[4*i+3];
const int z3= input[4*i+2] + input[4*i+3];
temp[4*i+0]= z0+z3;
temp[4*i+1]= z0-z3;
temp[4*i+2]= z1-z2;
temp[4*i+3]= z1+z2;
}
for(i=0; i<4; i++){
const int offset= x_offset[i];
const int z0= temp[4*0+i] + temp[4*2+i];
const int z1= temp[4*0+i] - temp[4*2+i];
const int z2= temp[4*1+i] - temp[4*3+i];
const int z3= temp[4*1+i] + temp[4*3+i];
output[stride* 0+offset]= ((((z0 + z3)*qmul + 128 ) >> 8));
output[stride* 1+offset]= ((((z1 + z2)*qmul + 128 ) >> 8));
output[stride* 4+offset]= ((((z1 - z2)*qmul + 128 ) >> 8));
output[stride* 5+offset]= ((((z0 - z3)*qmul + 128 ) >> 8));
}
#undef stride
}
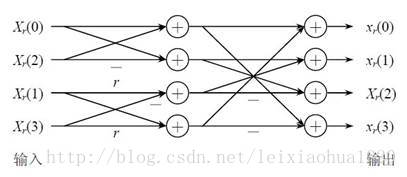
从源代码可以看出,ff_h264_chroma_dc_dequant_idct_8_c()实现了Hadamard反变换的蝶形算法。
Intel汇编语言版本帧内预测函数:基于MMX指令集和SSE指令集
前文记录的都是C语言版本的帧内预测函数,作为对比,在此记录2个Intel汇编语言版本帧内预测函数ff_pred16x16_vertical_8_mmx()和ff_pred16x16_vertical_8_sse()。在记录该函数之前首先回顾一下前文中提到的帧内预测初始化函数ff_h264_pred_init()。该函数的末尾进行了一个判断:如果支持ARM架构,则会调用ff_h264_pred_init_arm()初始化ARM平台的汇编函数;如果支持X86架构,则会调用ff_h264_pred_init_x86()初始化X86平台的汇编函数。在这里以X86平台为例,看一下X86平台帧内预测初始化函数ff_h264_pred_init_x86()。
ff_h264_pred_init_x86()
ff_h264_pred_init_x86()的定义位于libavcodec\x86\h264_intrapred_init.c(注意位于libavcodec的子文件夹x86下),如下所示。av_cold void ff_h264_pred_init_x86(H264PredContext *h, int codec_id,
const int bit_depth,
const int chroma_format_idc)
{
int cpu_flags = av_get_cpu_flags();
if (bit_depth == 8) {
if (EXTERNAL_MMX(cpu_flags)) {
h->pred16x16[VERT_PRED8x8 ] = ff_pred16x16_vertical_8_mmx;
h->pred16x16[HOR_PRED8x8 ] = ff_pred16x16_horizontal_8_mmx;
if (chroma_format_idc <= 1) {
h->pred8x8 [VERT_PRED8x8 ] = ff_pred8x8_vertical_8_mmx;
h->pred8x8 [HOR_PRED8x8 ] = ff_pred8x8_horizontal_8_mmx;
}
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8) {
h->pred16x16[PLANE_PRED8x8 ] = ff_pred16x16_tm_vp8_8_mmx;
h->pred8x8 [PLANE_PRED8x8 ] = ff_pred8x8_tm_vp8_8_mmx;
h->pred4x4 [TM_VP8_PRED ] = ff_pred4x4_tm_vp8_8_mmx;
} else {
if (chroma_format_idc <= 1)
h->pred8x8 [PLANE_PRED8x8] = ff_pred8x8_plane_8_mmx;
if (codec_id == AV_CODEC_ID_SVQ3) {
if (cpu_flags & AV_CPU_FLAG_CMOV)
h->pred16x16[PLANE_PRED8x8] = ff_pred16x16_plane_svq3_8_mmx;
} else if (codec_id == AV_CODEC_ID_RV40) {
h->pred16x16[PLANE_PRED8x8] = ff_pred16x16_plane_rv40_8_mmx;
} else {
h->pred16x16[PLANE_PRED8x8] = ff_pred16x16_plane_h264_8_mmx;
}
}
}
if (EXTERNAL_MMXEXT(cpu_flags)) {
h->pred16x16[HOR_PRED8x8 ] = ff_pred16x16_horizontal_8_mmxext;
h->pred16x16[DC_PRED8x8 ] = ff_pred16x16_dc_8_mmxext;
if (chroma_format_idc <= 1)
h->pred8x8[HOR_PRED8x8 ] = ff_pred8x8_horizontal_8_mmxext;
h->pred8x8l [TOP_DC_PRED ] = ff_pred8x8l_top_dc_8_mmxext;
h->pred8x8l [DC_PRED ] = ff_pred8x8l_dc_8_mmxext;
h->pred8x8l [HOR_PRED ] = ff_pred8x8l_horizontal_8_mmxext;
h->pred8x8l [VERT_PRED ] = ff_pred8x8l_vertical_8_mmxext;
h->pred8x8l [DIAG_DOWN_RIGHT_PRED ] = ff_pred8x8l_down_right_8_mmxext;
h->pred8x8l [VERT_RIGHT_PRED ] = ff_pred8x8l_vertical_right_8_mmxext;
h->pred8x8l [HOR_UP_PRED ] = ff_pred8x8l_horizontal_up_8_mmxext;
h->pred8x8l [DIAG_DOWN_LEFT_PRED ] = ff_pred8x8l_down_left_8_mmxext;
h->pred8x8l [HOR_DOWN_PRED ] = ff_pred8x8l_horizontal_down_8_mmxext;
h->pred4x4 [DIAG_DOWN_RIGHT_PRED ] = ff_pred4x4_down_right_8_mmxext;
h->pred4x4 [VERT_RIGHT_PRED ] = ff_pred4x4_vertical_right_8_mmxext;
h->pred4x4 [HOR_DOWN_PRED ] = ff_pred4x4_horizontal_down_8_mmxext;
h->pred4x4 [DC_PRED ] = ff_pred4x4_dc_8_mmxext;
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8 ||
codec_id == AV_CODEC_ID_H264) {
h->pred4x4 [DIAG_DOWN_LEFT_PRED] = ff_pred4x4_down_left_8_mmxext;
}
if (codec_id == AV_CODEC_ID_SVQ3 || codec_id == AV_CODEC_ID_H264) {
h->pred4x4 [VERT_LEFT_PRED ] = ff_pred4x4_vertical_left_8_mmxext;
}
if (codec_id != AV_CODEC_ID_RV40) {
h->pred4x4 [HOR_UP_PRED ] = ff_pred4x4_horizontal_up_8_mmxext;
}
if (codec_id == AV_CODEC_ID_SVQ3 || codec_id == AV_CODEC_ID_H264) {
if (chroma_format_idc <= 1) {
h->pred8x8[TOP_DC_PRED8x8 ] = ff_pred8x8_top_dc_8_mmxext;
h->pred8x8[DC_PRED8x8 ] = ff_pred8x8_dc_8_mmxext;
}
}
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8) {
h->pred16x16[PLANE_PRED8x8 ] = ff_pred16x16_tm_vp8_8_mmxext;
h->pred8x8 [DC_PRED8x8 ] = ff_pred8x8_dc_rv40_8_mmxext;
h->pred8x8 [PLANE_PRED8x8 ] = ff_pred8x8_tm_vp8_8_mmxext;
h->pred4x4 [TM_VP8_PRED ] = ff_pred4x4_tm_vp8_8_mmxext;
h->pred4x4 [VERT_PRED ] = ff_pred4x4_vertical_vp8_8_mmxext;
} else {
if (chroma_format_idc <= 1)
h->pred8x8 [PLANE_PRED8x8] = ff_pred8x8_plane_8_mmxext;
if (codec_id == AV_CODEC_ID_SVQ3) {
h->pred16x16[PLANE_PRED8x8 ] = ff_pred16x16_plane_svq3_8_mmxext;
} else if (codec_id == AV_CODEC_ID_RV40) {
h->pred16x16[PLANE_PRED8x8 ] = ff_pred16x16_plane_rv40_8_mmxext;
} else {
h->pred16x16[PLANE_PRED8x8 ] = ff_pred16x16_plane_h264_8_mmxext;
}
}
}
if (EXTERNAL_SSE(cpu_flags)) {
h->pred16x16[VERT_PRED8x8] = ff_pred16x16_vertical_8_sse;
}
if (EXTERNAL_SSE2(cpu_flags)) {
h->pred16x16[DC_PRED8x8 ] = ff_pred16x16_dc_8_sse2;
h->pred8x8l [DIAG_DOWN_LEFT_PRED ] = ff_pred8x8l_down_left_8_sse2;
h->pred8x8l [DIAG_DOWN_RIGHT_PRED ] = ff_pred8x8l_down_right_8_sse2;
h->pred8x8l [VERT_RIGHT_PRED ] = ff_pred8x8l_vertical_right_8_sse2;
h->pred8x8l [VERT_LEFT_PRED ] = ff_pred8x8l_vertical_left_8_sse2;
h->pred8x8l [HOR_DOWN_PRED ] = ff_pred8x8l_horizontal_down_8_sse2;
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8) {
h->pred16x16[PLANE_PRED8x8 ] = ff_pred16x16_tm_vp8_8_sse2;
h->pred8x8 [PLANE_PRED8x8 ] = ff_pred8x8_tm_vp8_8_sse2;
} else {
if (chroma_format_idc <= 1)
h->pred8x8 [PLANE_PRED8x8] = ff_pred8x8_plane_8_sse2;
if (codec_id == AV_CODEC_ID_SVQ3) {
h->pred16x16[PLANE_PRED8x8] = ff_pred16x16_plane_svq3_8_sse2;
} else if (codec_id == AV_CODEC_ID_RV40) {
h->pred16x16[PLANE_PRED8x8] = ff_pred16x16_plane_rv40_8_sse2;
} else {
h->pred16x16[PLANE_PRED8x8] = ff_pred16x16_plane_h264_8_sse2;
}
}
}
if (EXTERNAL_SSSE3(cpu_flags)) {
h->pred16x16[HOR_PRED8x8 ] = ff_pred16x16_horizontal_8_ssse3;
h->pred16x16[DC_PRED8x8 ] = ff_pred16x16_dc_8_ssse3;
if (chroma_format_idc <= 1)
h->pred8x8 [HOR_PRED8x8 ] = ff_pred8x8_horizontal_8_ssse3;
h->pred8x8l [TOP_DC_PRED ] = ff_pred8x8l_top_dc_8_ssse3;
h->pred8x8l [DC_PRED ] = ff_pred8x8l_dc_8_ssse3;
h->pred8x8l [HOR_PRED ] = ff_pred8x8l_horizontal_8_ssse3;
h->pred8x8l [VERT_PRED ] = ff_pred8x8l_vertical_8_ssse3;
h->pred8x8l [DIAG_DOWN_LEFT_PRED ] = ff_pred8x8l_down_left_8_ssse3;
h->pred8x8l [DIAG_DOWN_RIGHT_PRED ] = ff_pred8x8l_down_right_8_ssse3;
h->pred8x8l [VERT_RIGHT_PRED ] = ff_pred8x8l_vertical_right_8_ssse3;
h->pred8x8l [VERT_LEFT_PRED ] = ff_pred8x8l_vertical_left_8_ssse3;
h->pred8x8l [HOR_UP_PRED ] = ff_pred8x8l_horizontal_up_8_ssse3;
h->pred8x8l [HOR_DOWN_PRED ] = ff_pred8x8l_horizontal_down_8_ssse3;
if (codec_id == AV_CODEC_ID_VP7 || codec_id == AV_CODEC_ID_VP8) {
h->pred8x8 [PLANE_PRED8x8 ] = ff_pred8x8_tm_vp8_8_ssse3;
h->pred4x4 [TM_VP8_PRED ] = ff_pred4x4_tm_vp8_8_ssse3;
} else {
if (chroma_format_idc <= 1)
h->pred8x8 [PLANE_PRED8x8] = ff_pred8x8_plane_8_ssse3;
if (codec_id == AV_CODEC_ID_SVQ3) {
h->pred16x16[PLANE_PRED8x8] = ff_pred16x16_plane_svq3_8_ssse3;
} else if (codec_id == AV_CODEC_ID_RV40) {
h->pred16x16[PLANE_PRED8x8] = ff_pred16x16_plane_rv40_8_ssse3;
} else {
h->pred16x16[PLANE_PRED8x8] = ff_pred16x16_plane_h264_8_ssse3;
}
}
}
} else if (bit_depth == 10) {
if (EXTERNAL_MMXEXT(cpu_flags)) {
h->pred4x4[DC_PRED ] = ff_pred4x4_dc_10_mmxext;
h->pred4x4[HOR_UP_PRED ] = ff_pred4x4_horizontal_up_10_mmxext;
if (chroma_format_idc <= 1)
h->pred8x8[DC_PRED8x8 ] = ff_pred8x8_dc_10_mmxext;
h->pred8x8l[DC_128_PRED ] = ff_pred8x8l_128_dc_10_mmxext;
h->pred16x16[DC_PRED8x8 ] = ff_pred16x16_dc_10_mmxext;
h->pred16x16[TOP_DC_PRED8x8 ] = ff_pred16x16_top_dc_10_mmxext;
h->pred16x16[DC_128_PRED8x8 ] = ff_pred16x16_128_dc_10_mmxext;
h->pred16x16[LEFT_DC_PRED8x8 ] = ff_pred16x16_left_dc_10_mmxext;
h->pred16x16[VERT_PRED8x8 ] = ff_pred16x16_vertical_10_mmxext;
h->pred16x16[HOR_PRED8x8 ] = ff_pred16x16_horizontal_10_mmxext;
}
if (EXTERNAL_SSE2(cpu_flags)) {
h->pred4x4[DIAG_DOWN_LEFT_PRED ] = ff_pred4x4_down_left_10_sse2;
h->pred4x4[DIAG_DOWN_RIGHT_PRED] = ff_pred4x4_down_right_10_sse2;
h->pred4x4[VERT_LEFT_PRED ] = ff_pred4x4_vertical_left_10_sse2;
h->pred4x4[VERT_RIGHT_PRED ] = ff_pred4x4_vertical_right_10_sse2;
h->pred4x4[HOR_DOWN_PRED ] = ff_pred4x4_horizontal_down_10_sse2;
if (chroma_format_idc <= 1) {
h->pred8x8[DC_PRED8x8 ] = ff_pred8x8_dc_10_sse2;
h->pred8x8[TOP_DC_PRED8x8 ] = ff_pred8x8_top_dc_10_sse2;
h->pred8x8[PLANE_PRED8x8 ] = ff_pred8x8_plane_10_sse2;
h->pred8x8[VERT_PRED8x8 ] = ff_pred8x8_vertical_10_sse2;
h->pred8x8[HOR_PRED8x8 ] = ff_pred8x8_horizontal_10_sse2;
}
h->pred8x8l[VERT_PRED ] = ff_pred8x8l_vertical_10_sse2;
h->pred8x8l[HOR_PRED ] = ff_pred8x8l_horizontal_10_sse2;
h->pred8x8l[DC_PRED ] = ff_pred8x8l_dc_10_sse2;
h->pred8x8l[DC_128_PRED ] = ff_pred8x8l_128_dc_10_sse2;
h->pred8x8l[TOP_DC_PRED ] = ff_pred8x8l_top_dc_10_sse2;
h->pred8x8l[DIAG_DOWN_LEFT_PRED ] = ff_pred8x8l_down_left_10_sse2;
h->pred8x8l[DIAG_DOWN_RIGHT_PRED] = ff_pred8x8l_down_right_10_sse2;
h->pred8x8l[VERT_RIGHT_PRED ] = ff_pred8x8l_vertical_right_10_sse2;
h->pred8x8l[HOR_UP_PRED ] = ff_pred8x8l_horizontal_up_10_sse2;
h->pred16x16[DC_PRED8x8 ] = ff_pred16x16_dc_10_sse2;
h->pred16x16[TOP_DC_PRED8x8 ] = ff_pred16x16_top_dc_10_sse2;
h->pred16x16[DC_128_PRED8x8 ] = ff_pred16x16_128_dc_10_sse2;
h->pred16x16[LEFT_DC_PRED8x8 ] = ff_pred16x16_left_dc_10_sse2;
h->pred16x16[VERT_PRED8x8 ] = ff_pred16x16_vertical_10_sse2;
h->pred16x16[HOR_PRED8x8 ] = ff_pred16x16_horizontal_10_sse2;
}
if (EXTERNAL_SSSE3(cpu_flags)) {
h->pred4x4[DIAG_DOWN_RIGHT_PRED] = ff_pred4x4_down_right_10_ssse3;
h->pred4x4[VERT_RIGHT_PRED ] = ff_pred4x4_vertical_right_10_ssse3;
h->pred4x4[HOR_DOWN_PRED ] = ff_pred4x4_horizontal_down_10_ssse3;
h->pred8x8l[HOR_PRED ] = ff_pred8x8l_horizontal_10_ssse3;
h->pred8x8l[DIAG_DOWN_LEFT_PRED ] = ff_pred8x8l_down_left_10_ssse3;
h->pred8x8l[DIAG_DOWN_RIGHT_PRED] = ff_pred8x8l_down_right_10_ssse3;
h->pred8x8l[VERT_RIGHT_PRED ] = ff_pred8x8l_vertical_right_10_ssse3;
h->pred8x8l[HOR_UP_PRED ] = ff_pred8x8l_horizontal_up_10_ssse3;
}
if (EXTERNAL_AVX(cpu_flags)) {
h->pred4x4[DIAG_DOWN_LEFT_PRED ] = ff_pred4x4_down_left_10_avx;
h->pred4x4[DIAG_DOWN_RIGHT_PRED] = ff_pred4x4_down_right_10_avx;
h->pred4x4[VERT_LEFT_PRED ] = ff_pred4x4_vertical_left_10_avx;
h->pred4x4[VERT_RIGHT_PRED ] = ff_pred4x4_vertical_right_10_avx;
h->pred4x4[HOR_DOWN_PRED ] = ff_pred4x4_horizontal_down_10_avx;
h->pred8x8l[VERT_PRED ] = ff_pred8x8l_vertical_10_avx;
h->pred8x8l[HOR_PRED ] = ff_pred8x8l_horizontal_10_avx;
h->pred8x8l[DC_PRED ] = ff_pred8x8l_dc_10_avx;
h->pred8x8l[TOP_DC_PRED ] = ff_pred8x8l_top_dc_10_avx;
h->pred8x8l[DIAG_DOWN_RIGHT_PRED] = ff_pred8x8l_down_right_10_avx;
h->pred8x8l[DIAG_DOWN_LEFT_PRED ] = ff_pred8x8l_down_left_10_avx;
h->pred8x8l[VERT_RIGHT_PRED ] = ff_pred8x8l_vertical_right_10_avx;
h->pred8x8l[HOR_UP_PRED ] = ff_pred8x8l_horizontal_up_10_avx;
}
}
}
从源代码可以看出,ff_h264_pred_init_x86()根据平台支持指令集的不同,将很多形如“XXX_mmx()”,“XXX_sse2()”,“XXX_ssse3()”,“XXX_avx()”的函数赋值给了H264PredContext中的帧内预测函数指针。在这里我们看2个针对16x16帧内预测Vertical模式优化的汇编函数:基于MMX指令集ff_pred16x16_vertical_8_mmx()和基于SSE指令集的ff_pred16x16_vertical_8_sse()。
ff_pred16x16_vertical_8_mmx()
ff_pred16x16_vertical_8_mmx()的函数定义位于libavcodec\x86\h264_intrapred.asm,如下所示。;-----------------------------------------------------------------------------
; void ff_pred16x16_vertical_8(uint8_t *src, int stride)
; 注释:雷霄骅
; 16x16帧内预测-Vertical
;
; Vertical预测方式
; |X1 X2 X3 X4
; --+-----------
; |X1 X2 X3 X4
; |X1 X2 X3 X4
; |X1 X2 X3 X4
; |X1 X2 X3 X4
;
;-----------------------------------------------------------------------------
;mmx指令优化
INIT_MMX mmx
cglobal pred16x16_vertical_8, 2,3
;C语言调用汇编的时候,r0接收第1个参数(src),r1接收第2个参数(stride)......
sub r0, r1 ;r0=r0-r1。只有r0和r1可以作为地址寄存器,在这里里面存储的是地址(r2-r7不可以)
;此时r0指向16x16块上面一行像素数据
mov r2, 8 ;r2=8;r2为循环计数器,每次循环减1,r2为0的时候,循环停止
movq mm0, [r0+0] ;类似于memcpy(&mm0,r0,8)。movq传递64bit(8字节,对应8像素)数据。“[]”代表传送r0地址的数据.
;即将宏块上面1行像素中前8个像素传入mm0(用于循环中的赋值)
;注:MOV-1~2字节(word),MOVD-4字节(Dword),MOVQ-8字节(Qword)
movq mm1, [r0+8] ;类似于memcpy(&mm1,r0+8,8)。2次movq传递128bit(16个像素)。mm0和mm1中存储了宏块上方一行像素的值
;即将宏块上面1行像素中后8个像素传入mm1
.loop: ;循环
movq [r0+r1*1+0], mm0 ;类似于memcpy(r0+r1,&mm0,8)。第1次循环,拷贝mm0至宏块第1行前8个像素。
movq [r0+r1*1+8], mm1 ;类似于memcpy(r0+r1+8,&mm1,8)。第1次循环,拷贝mm1至宏块第1行后8个像素。
movq [r0+r1*2+0], mm0 ;类似于memcpy(r0+r1*2,&mm0,8)。第1次循环,拷贝mm0至宏块第2行前8个像素。
movq [r0+r1*2+8], mm1 ;类似于memcpy(r0+r1*2+8,&mm1,8)。第1次循环,拷贝mm1至宏块第2行后8个像素。
;总而言之,一次处理2行,16行像素一共处理8次
lea r0, [r0+r1*2] ;r0=r0+r1*2。r0前移2行。注意“lea”是传送地址的指令
dec r2 ;r2--;
jg .loop ;r2=0时候,不再跳转
REP_RET
由于对汇编语言并不算很熟悉,因此对ff_pred16x16_vertical_8_mmx()中的每行函数都进行了注释并类比了C语言中等同的方法。从代码中可以看出,由于MMX指令集支持通过“MOVQ”指令一次性处理64bit(8字节,即8个像素点)数据,所以基于MMX指令集优化后的函数调用32次“MOVQ”即可完成16x16帧内预测Vertical模式的像素赋值工作(循环“loop”执行8次)。
下面再看一个针对SSE指令集优化过的函数ff_pred16x16_vertical_8_sse()。由于SSE指令集比MMX指令集更为先进,所以ff_pred16x16_vertical_8_sse()的效率比ff_pred16x16_vertical_8_mmx()还要高。
ff_pred16x16_vertical_8_sse()
ff_pred16x16_vertical_8_sse()的函数定义位于libavcodec\x86\h264_intrapred.asm,如下所示。;sse指令优化
INIT_XMM sse
cglobal pred16x16_vertical_8, 2,3
sub r0, r1 ;r0=r0-r1。r0取值为src;r1取值为stride。此时r0指向16x16块上面一行像素数据
mov r2, 4 ;r2=4;r2为循环计数器,每次循环减1,r2为0的时候,循环停止
movaps xmm0, [r0] ;类似于memcpy(&xmm0,r0,16)。movaps传递128bit(16字节,对应16像素)数据
.loop: ;循环
movaps [r0+r1*1], xmm0 ;类似于memcpy(r0+r1,&xmm0,16)。第1次循环,拷贝xmm0至宏块第1行16个像素。
movaps [r0+r1*2], xmm0 ;类似于memcpy(r0+r1*2,&xmm0,16)。第1次循环,拷贝xmm0至宏块第2行16个像素。
lea r0, [r0+r1*2] ;r0=r0+r1*2。r0前移2行。
movaps [r0+r1*1], xmm0 ;类似于memcpy(r0+r1,&xmm0,16)。第1次循环,拷贝xmm0至宏块第1行16个像素。
movaps [r0+r1*2], xmm0 ;类似于memcpy(r0+r1*2,&xmm0,16)。第1次循环,拷贝xmm0至宏块第2行16个像素。
lea r0, [r0+r1*2] ;r0=r0+r1*2。r0再次前移2行。
;注:一次循环处理了4行像素。16行像素一共处理4次
dec r2 ;r2--;
jg .loop ;r2=0时候,不再跳转
REP_RET
从源代码可以看出,由于SSE指令集支持通过“MOVAPS”指令支持一次性处理128bit(16字节,即16个像素点)数据,所以基于MMX指令集优化后的函数调用16次“MOVAPS”即可完成16x16帧内预测Vertical模式的像素赋值工作(循环“loop”执行4次)。
至此有关FFmpeg H.264解码器帧内预测的部分的源代码就基本分析完毕了。下面分析处理帧内预测宏块的第二个步骤:残差数据的DCT反变化和叠加。
hl_decode_mb_idct_luma()
hl_decode_mb_idct_luma()对宏块的亮度残差进行进行DCT反变换,并且将残差数据叠加到前面阵内或者帧间预测得到的预测数据上(需要注意实际上“DCT反变换”和“叠加”两个步骤是同时完成的)。该函数的定义位于libavcodec\h264_mb.c,如下所示。//亮度的IDCT
static av_always_inline void hl_decode_mb_idct_luma(H264Context *h, int mb_type,
int is_h264, int simple,
int transform_bypass,
int pixel_shift,
int *block_offset,
int linesize,
uint8_t *dest_y, int p)
{
//用于IDCT
void (*idct_add)(uint8_t *dst, int16_t *block, int stride);
int i;
block_offset += 16 * p;
//Intra4x4的DCT反变换在pred部分已经完成,这里就不需要处理了
if (!IS_INTRA4x4(mb_type)) {
if (is_h264) {
//Intra16x16宏块
if (IS_INTRA16x16(mb_type)) {
//transform_bypass=0,不考虑
if (transform_bypass) {
if (h->sps.profile_idc == 244 &&
(h->intra16x16_pred_mode == VERT_PRED8x8 ||
h->intra16x16_pred_mode == HOR_PRED8x8)) {
h->hpc.pred16x16_add[h->intra16x16_pred_mode](dest_y, block_offset,
h->mb + (p * 256 << pixel_shift),
linesize);
} else {
for (i = 0; i < 16; i++)
if (h->non_zero_count_cache[scan8[i + p * 16]] ||
dctcoef_get(h->mb, pixel_shift, i * 16 + p * 256))
h->h264dsp.h264_add_pixels4_clear(dest_y + block_offset[i],
h->mb + (i * 16 + p * 256 << pixel_shift),
linesize);
}
} else {
//Intra16x16的DCT反变换
//最后的“16”代表内部循环处理16次
h->h264dsp.h264_idct_add16intra(dest_y, block_offset,
h->mb + (p * 256 << pixel_shift),
linesize,
h->non_zero_count_cache + p * 5 * 8);
}
} else if (h->cbp & 15) {//15=1111,即残差全部传送了
//Inter类型的宏块
//transform_bypass=0,不考虑
if (transform_bypass) {
const int di = IS_8x8DCT(mb_type) ? 4 : 1;
idct_add = IS_8x8DCT(mb_type) ? h->h264dsp.h264_add_pixels8_clear
: h->h264dsp.h264_add_pixels4_clear;
for (i = 0; i < 16; i += di)
if (h->non_zero_count_cache[scan8[i + p * 16]])
idct_add(dest_y + block_offset[i],
h->mb + (i * 16 + p * 256 << pixel_shift),
linesize);
} else {
//8x8的IDCT
if (IS_8x8DCT(mb_type))
h->h264dsp.h264_idct8_add4(dest_y, block_offset,
h->mb + (p * 256 << pixel_shift),
linesize,
h->non_zero_count_cache + p * 5 * 8);
//处理16x16宏块
//采用4x4的IDCT
//最后的“16”代表内部循环处理16次
//输出结果到dest_y
//h->mb中存储了DCT系数
else
h->h264dsp.h264_idct_add16(dest_y, block_offset,
h->mb + (p * 256 << pixel_shift),
linesize,
h->non_zero_count_cache + p * 5 * 8);
}
}
} else if (CONFIG_SVQ3_DECODER) {
for (i = 0; i < 16; i++)
if (h->non_zero_count_cache[scan8[i + p * 16]] || h->mb[i * 16 + p * 256]) {
// FIXME benchmark weird rule, & below
uint8_t *const ptr = dest_y + block_offset[i];
ff_svq3_add_idct_c(ptr, h->mb + i * 16 + p * 256, linesize,
h->qscale, IS_INTRA(mb_type) ? 1 : 0);
}
}
}
}
下面根据源代码简单梳理一下hl_decode_mb_idct_luma()的流程:
(1)判断宏块是否属于Intra4x4类型,如果是,函数直接返回(Intra4x4比较特殊,它的DCT反变换已经前文所述的“帧内预测”部分完成)。
(2)根据不同的宏块类型作不同的处理:
a)Intra16x16:调用H264DSPContext的汇编函数h264_idct_add16intra()进行DCT反变换
b)Inter类型:调用H264DSPContext的汇编函数h264_idct_add16()进行DCT反变换
PS:需要注意的是h264_idct_add16intra()和h264_idct_add16()只有微小的区别,它们的基本逻辑都是把16x16的块划分为16个4x4的块再进行DCT反变换。此外还有一点需要注意:函数名中的“add”的含义是将DCT反变换之后的残差像素数据直接叠加到已有数据之上。
下文记录DCT反变化函数相关的源代码。
DCT反变化小知识
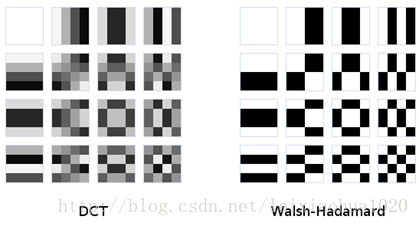
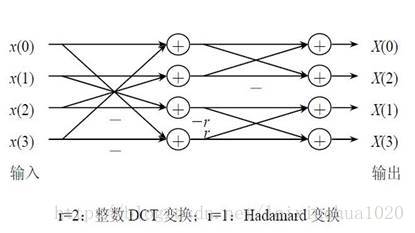
有关DCT变换的资料比较多,在这里不再重复叙述。DCT变换的核心理念就是把图像的低频信息(对应大面积平坦区域)变换到系数矩阵的左上角,而把高频信息变换到系数矩阵的右下角,这样就可以在压缩的时候(量化)去除掉人眼不敏感的高频信息(位于矩阵右下角的系数)从而达到压缩数据的目的。二维8x8DCT变换常见的示意图如下所示。
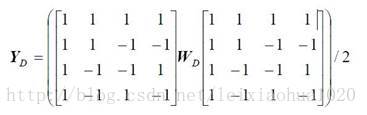
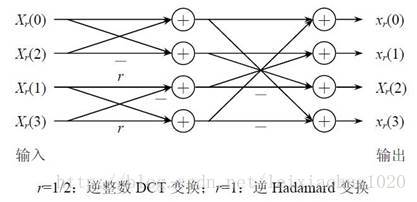
早期的DCT变换都使用了8x8的矩阵(变换系数为小数)。在H.264标准中新提出了一种4x4的矩阵。这种4x4 DCT变换的系数都是整数,一方面提高了运算的准确性,一方面也利于代码的优化。4x4整数DCT变换的示意图如下所示(作为对比,右侧为4x4块的Hadamard变换的示意图)。
4x4整数DCT变换的公式如下所示。
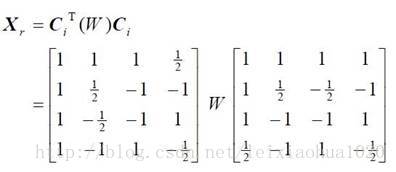
DCT反变换汇编函数的初始化
FFmpeg H.264解码器中4x4DCT反变换(也称为“IDCT”)汇编函数指针位于H264DSPContext中。在FFmpeg H.264解码器初始化的时候,会调用ff_h264dsp_init()根据系统的配置对H264DSPContext中的这些IDCT函数指针进行赋值(H264DSPContext中实际上不仅仅包含DCT反变换函数,还包含了Hadamard反变换函数,环路滤波函数,在这里不详细讨论)。下面简单看一下ff_h264_pred_init()的定义。ff_h264dsp_init()
ff_h264_pred_init()用于初始化DCT反变换函数,Hadamard反变换函数,环路滤波函数。该函数的定义位于libavcodec\h264dsp.c,如下所示。//初始化DSP相关的函数。包含了IDCT、环路滤波函数等
av_cold void ff_h264dsp_init(H264DSPContext *c, const int bit_depth,
const int chroma_format_idc)
{
#undef FUNC
#define FUNC(a, depth) a ## _ ## depth ## _c
#define ADDPX_DSP(depth) \
c->h264_add_pixels4_clear = FUNC(ff_h264_add_pixels4, depth);\
c->h264_add_pixels8_clear = FUNC(ff_h264_add_pixels8, depth)
if (bit_depth > 8 && bit_depth <= 16) {
ADDPX_DSP(16);
} else {
ADDPX_DSP(8);
}
#define H264_DSP(depth) \
c->h264_idct_add= FUNC(ff_h264_idct_add, depth);\
c->h264_idct8_add= FUNC(ff_h264_idct8_add, depth);\
c->h264_idct_dc_add= FUNC(ff_h264_idct_dc_add, depth);\
c->h264_idct8_dc_add= FUNC(ff_h264_idct8_dc_add, depth);\
c->h264_idct_add16 = FUNC(ff_h264_idct_add16, depth);\
c->h264_idct8_add4 = FUNC(ff_h264_idct8_add4, depth);\
if (chroma_format_idc <= 1)\
c->h264_idct_add8 = FUNC(ff_h264_idct_add8, depth);\
else\
c->h264_idct_add8 = FUNC(ff_h264_idct_add8_422, depth);\
c->h264_idct_add16intra= FUNC(ff_h264_idct_add16intra, depth);\
c->h264_luma_dc_dequant_idct= FUNC(ff_h264_luma_dc_dequant_idct, depth);\
if (chroma_format_idc <= 1)\
c->h264_chroma_dc_dequant_idct= FUNC(ff_h264_chroma_dc_dequant_idct, depth);\
else\
c->h264_chroma_dc_dequant_idct= FUNC(ff_h264_chroma422_dc_dequant_idct, depth);\
\
c->weight_h264_pixels_tab[0]= FUNC(weight_h264_pixels16, depth);\
c->weight_h264_pixels_tab[1]= FUNC(weight_h264_pixels8, depth);\
c->weight_h264_pixels_tab[2]= FUNC(weight_h264_pixels4, depth);\
c->weight_h264_pixels_tab[3]= FUNC(weight_h264_pixels2, depth);\
c->biweight_h264_pixels_tab[0]= FUNC(biweight_h264_pixels16, depth);\
c->biweight_h264_pixels_tab[1]= FUNC(biweight_h264_pixels8, depth);\
c->biweight_h264_pixels_tab[2]= FUNC(biweight_h264_pixels4, depth);\
c->biweight_h264_pixels_tab[3]= FUNC(biweight_h264_pixels2, depth);\
\
c->h264_v_loop_filter_luma= FUNC(h264_v_loop_filter_luma, depth);\
c->h264_h_loop_filter_luma= FUNC(h264_h_loop_filter_luma, depth);\
c->h264_h_loop_filter_luma_mbaff= FUNC(h264_h_loop_filter_luma_mbaff, depth);\
c->h264_v_loop_filter_luma_intra= FUNC(h264_v_loop_filter_luma_intra, depth);\
c->h264_h_loop_filter_luma_intra= FUNC(h264_h_loop_filter_luma_intra, depth);\
c->h264_h_loop_filter_luma_mbaff_intra= FUNC(h264_h_loop_filter_luma_mbaff_intra, depth);\
c->h264_v_loop_filter_chroma= FUNC(h264_v_loop_filter_chroma, depth);\
if (chroma_format_idc <= 1)\
c->h264_h_loop_filter_chroma= FUNC(h264_h_loop_filter_chroma, depth);\
else\
c->h264_h_loop_filter_chroma= FUNC(h264_h_loop_filter_chroma422, depth);\
if (chroma_format_idc <= 1)\
c->h264_h_loop_filter_chroma_mbaff= FUNC(h264_h_loop_filter_chroma_mbaff, depth);\
else\
c->h264_h_loop_filter_chroma_mbaff= FUNC(h264_h_loop_filter_chroma422_mbaff, depth);\
c->h264_v_loop_filter_chroma_intra= FUNC(h264_v_loop_filter_chroma_intra, depth);\
if (chroma_format_idc <= 1)\
c->h264_h_loop_filter_chroma_intra= FUNC(h264_h_loop_filter_chroma_intra, depth);\
else\
c->h264_h_loop_filter_chroma_intra= FUNC(h264_h_loop_filter_chroma422_intra, depth);\
if (chroma_format_idc <= 1)\
c->h264_h_loop_filter_chroma_mbaff_intra= FUNC(h264_h_loop_filter_chroma_mbaff_intra, depth);\
else\
c->h264_h_loop_filter_chroma_mbaff_intra= FUNC(h264_h_loop_filter_chroma422_mbaff_intra, depth);\
c->h264_loop_filter_strength= NULL;
//根据颜色位深,初始化不同的函数
//一般为8bit,即执行H264_DSP(8)
switch (bit_depth) {
case 9:
H264_DSP(9);
break;
case 10:
H264_DSP(10);
break;
case 12:
H264_DSP(12);
break;
case 14:
H264_DSP(14);
break;
default:
av_assert0(bit_depth<=8);
H264_DSP(8);
break;
}
//这个函数查找startcode的时候用到
//在这里竟然单独列出
c->startcode_find_candidate = ff_startcode_find_candidate_c;
//如果系统支持,则初始化经过汇编优化的函数
if (ARCH_AARCH64) ff_h264dsp_init_aarch64(c, bit_depth, chroma_format_idc);
if (ARCH_ARM) ff_h264dsp_init_arm(c, bit_depth, chroma_format_idc);
if (ARCH_PPC) ff_h264dsp_init_ppc(c, bit_depth, chroma_format_idc);
if (ARCH_X86) ff_h264dsp_init_x86(c, bit_depth, chroma_format_idc);
}
从ff_h264dsp_init()的定义可以看出,该函数通过调用“H264_DSP(depth)”宏完成C语言版本的DCT反变换函数,Hadamard反变换函数,环路滤波函数的初始化。在函数的末尾还会判断系统的特性,如果允许的话会初始化效率更高的经过汇编优化的函数。
下面我们展开“H264_DSP(8)”宏看看C语言版本函数的初始化过程。
c->h264_idct_add= ff_h264_idct_add_8_c;
c->h264_idct8_add= ff_h264_idct8_add_8_c;
c->h264_idct_dc_add= ff_h264_idct_dc_add_8_c;
c->h264_idct8_dc_add= ff_h264_idct8_dc_add_8_c;
c->h264_idct_add16 = ff_h264_idct_add16_8_c;
c->h264_idct8_add4 = ff_h264_idct8_add4_8_c;
if (chroma_format_idc <= 1)
c->h264_idct_add8 = ff_h264_idct_add8_8_c;
else
c->h264_idct_add8 = ff_h264_idct_add8_422_8_c;
c->h264_idct_add16intra= ff_h264_idct_add16intra_8_c;
c->h264_luma_dc_dequant_idct= ff_h264_luma_dc_dequant_idct_8_c;
if (chroma_format_idc <= 1)
c->h264_chroma_dc_dequant_idct= ff_h264_chroma_dc_dequant_idct_8_c;
else
c->h264_chroma_dc_dequant_idct= ff_h264_chroma422_dc_dequant_idct_8_c;
c->weight_h264_pixels_tab[0]= weight_h264_pixels16_8_c;
c->weight_h264_pixels_tab[1]= weight_h264_pixels8_8_c;
c->weight_h264_pixels_tab[2]= weight_h264_pixels4_8_c;
c->weight_h264_pixels_tab[3]= weight_h264_pixels2_8_c;
c->biweight_h264_pixels_tab[0]= biweight_h264_pixels16_8_c;
c->biweight_h264_pixels_tab[1]= biweight_h264_pixels8_8_c;
c->biweight_h264_pixels_tab[2]= biweight_h264_pixels4_8_c;
c->biweight_h264_pixels_tab[3]= biweight_h264_pixels2_8_c;
c->h264_v_loop_filter_luma= h264_v_loop_filter_luma_8_c;
c->h264_h_loop_filter_luma= h264_h_loop_filter_luma_8_c;
c->h264_h_loop_filter_luma_mbaff= h264_h_loop_filter_luma_mbaff_8_c;
c->h264_v_loop_filter_luma_intra= h264_v_loop_filter_luma_intra_8_c;
c->h264_h_loop_filter_luma_intra= h264_h_loop_filter_luma_intra_8_c;
c->h264_h_loop_filter_luma_mbaff_intra= h264_h_loop_filter_luma_mbaff_intra_8_c;
c->h264_v_loop_filter_chroma= h264_v_loop_filter_chroma_8_c;
if (chroma_format_idc <= 1)
c->h264_h_loop_filter_chroma= h264_h_loop_filter_chroma_8_c;
else
c->h264_h_loop_filter_chroma= h264_h_loop_filter_chroma422_8_c;
if (chroma_format_idc <= 1)
c->h264_h_loop_filter_chroma_mbaff= h264_h_loop_filter_chroma_mbaff_8_c;
else
c->h264_h_loop_filter_chroma_mbaff= h264_h_loop_filter_chroma422_mbaff_8_c;
c->h264_v_loop_filter_chroma_intra= h264_v_loop_filter_chroma_intra_8_c;
if (chroma_format_idc <= 1)
c->h264_h_loop_filter_chroma_intra= h264_h_loop_filter_chroma_intra_8_c;
else
c->h264_h_loop_filter_chroma_intra= h264_h_loop_filter_chroma422_intra_8_c;
if (chroma_format_idc <= 1)
c->h264_h_loop_filter_chroma_mbaff_intra= h264_h_loop_filter_chroma_mbaff_intra_8_c;
else
c->h264_h_loop_filter_chroma_mbaff_intra= h264_h_loop_filter_chroma422_mbaff_intra_8_c;
c->h264_loop_filter_strength= ((void *)0);
从“H264_DSP(8)”宏展开的结果可以看出:
(1)4x4块的DCT反变换函数指针h264_idct_add()指向ff_h264_idct_add_8_c()下文将会简单分析上述几个函数。
(2)只包含DC系数的4x4块的DCT反变换函数指针h264_idct_dc_add()指向ff_h264_idct_dc_add_8_c()
(3)16x16块的DCT反变换函数指针h264_idct_add16()指向ff_h264_idct_add16_8_c()
(4)16x16的Intra块的DCT反变换函数指针h264_idct_add16intra()指向ff_h264_idct_add16intra_8_c()
ff_h264_idct_add_8_c()
ff_h264_idct_add_8_c()用于进行4x4整数DCT反变换,该函数的定义位于libavcodec\h264idct_template.c,如下所示。/* IDCT
*
* 注释:雷霄骅
* leixiaohua1020@126.com
* http://blog.csdn.net/leixiaohua1020
*
* 参数:
* _block:输入DCT系数
* _dst:输出像素数据
* stride:一行图像数据的大小
*
*/
//IDCT反变换(4x4)
//“add”的意思是在像素数据(通过预测获得)上面叠加(而不是赋值)IDCT的结果
void FUNCC(ff_h264_idct_add)(uint8_t *_dst, int16_t *_block, int stride)
{
/*
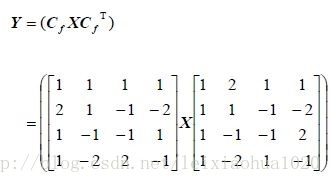
* | 1 1 1 1 | | 1 2 1 1 |
* | 2 1 -1 -2 | | 1 1 -1 -2 |
* Y = | 1 -1 -1 -2 | X | 1 -1 -1 2 |
* | 1 -2 2 -1 | | 1 -2 1 -1 |
*
*/
int i;
pixel *dst = (pixel*)_dst;
dctcoef *block = (dctcoef*)_block;
stride >>= sizeof(pixel)-1;
block[0] += 1 << 5;
//蝶形算法(一维变换,纵向)
//---+----------
// 0 | | | |
// 4 |
// 8 |
// 12|
//---+----------
for(i=0; i<4; i++){
//[0]和[2]
const int z0= block[i + 4*0] + block[i + 4*2];
const int z1= block[i + 4*0] - block[i + 4*2];
//[1]和[3]
const int z2= (block[i + 4*1]>>1) - block[i + 4*3];
const int z3= block[i + 4*1] + (block[i + 4*3]>>1);
block[i + 4*0]= z0 + z3;
block[i + 4*1]= z1 + z2;
block[i + 4*2]= z1 - z2;
block[i + 4*3]= z0 - z3;
}
//蝶形算法(另一维变换,横向)
//---+----------
// 0 | 1 | 2 | 3 |
// |
// |
// |
//---+----------
for(i=0; i<4; i++){
const int z0= block[0 + 4*i] + block[2 + 4*i];
const int z1= block[0 + 4*i] - block[2 + 4*i];
const int z2= (block[1 + 4*i]>>1) - block[3 + 4*i];
const int z3= block[1 + 4*i] + (block[3 + 4*i]>>1);
//av_clip_pixel(): 把一个整形转换取值范围为0-255的数值,用于限幅
//注意是累加而不是赋值到dst上(所以函数名中包含“add”)
//转置?!
//一列一列处理
dst[i + 0*stride]= av_clip_pixel(dst[i + 0*stride] + ((z0 + z3) >> 6));
dst[i + 1*stride]= av_clip_pixel(dst[i + 1*stride] + ((z1 + z2) >> 6));
dst[i + 2*stride]= av_clip_pixel(dst[i + 2*stride] + ((z1 - z2) >> 6));
dst[i + 3*stride]= av_clip_pixel(dst[i + 3*stride] + ((z0 - z3) >> 6));
}
//清零
memset(block, 0, 16 * sizeof(dctcoef));
}
从ff_h264_idct_add_8_c()的定义可以看出,该函数首先对4x4系数块中纵向的4列数据进行了一维DCT反变换,然后又对4x4系数块中横向的4行数据进行了DCT一维反变换,最后将变换后的残差图像数据叠加到了原有数据之上。
在这里一维DCT反变换采用了蝶形快速算法,如下图所示。
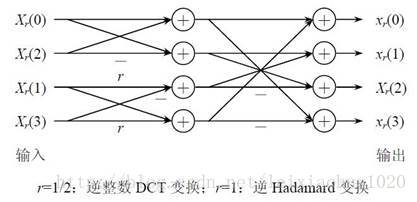
下面分析上文提到的几个函数。
h264_idct_dc_add()
ff_h264_idct_dc_add_8_c()用于对只有DC系数的4x4矩阵进行4x4整数DCT反变换,该函数的定义位于libavcodec\h264idct_template.c,如下所示。// assumes all AC coefs are 0
//DCT反变换,特殊情况:
//AC系数全部为0(没有传递AC系数,只有DC系数)
void FUNCC(ff_h264_idct_dc_add)(uint8_t *_dst, int16_t *_block, int stride){
int i, j;
pixel *dst = (pixel*)_dst;
dctcoef *block = (dctcoef*)_block;
//DC系数
int dc = (block[0] + 32) >> 6;
stride /= sizeof(pixel);
//设置为0
block[0] = 0;
//在4x4块的每个像素上面累加(注意不是赋值)dc系数
for( j = 0; j < 4; j++ )
{
for( i = 0; i < 4; i++ )
dst[i] = av_clip_pixel( dst[i] + dc );//av_clip_pixel(): 把一个整形转换取值范围为0-255的数值,用于限幅
dst += stride;//下一行
}
}可以看出只有DC系数的DCT反变换相比前面“正式”的DCT反变换来说简单了很多,只需要把DC系数赋值到4x4块中的每个像素上就可以了。
ff_h264_idct_add16_8_c()
ff_h264_idct_add16_8_c()用于对16x16的块进行4x4整数DCT反变换,该函数的定义位于libavcodec\h264idct_template.c,如下所示。//处理16x16宏块
//采用4x4的IDCT
//最后的“16”代表内部循环处理16次
//输入为block,输出为dst
void FUNCC(ff_h264_idct_add16)(uint8_t *dst, const int *block_offset, int16_t *block, int stride, const uint8_t nnzc[15*8]){
int i;
//循环16次
for(i=0; i<16; i++){
//非零系数个数
int nnz = nnzc[ scan8[i] ];
//非零系数个数不为0才处理
if(nnz){
//特殊:只有DC系数
if(nnz==1 && ((dctcoef*)block)[i*16]) FUNCC(ff_h264_idct_dc_add)(dst + block_offset[i], block + i*16*sizeof(pixel), stride);
//一般的情况
else FUNCC(ff_h264_idct_add )(dst + block_offset[i], block + i*16*sizeof(pixel), stride);
}
}
}从源代码可以看出,16x16块的4x4DCT反变换的实质就是把16x16的块分割为16个4x4的块,然后分别进行4x4DCT反变换。
h264_idct_add16intra()
h264_idct_add16intra()用于对16x16的帧内预测(Intra)的块进行4x4整数DCT反变换,该函数的定义位于libavcodec\h264idct_template.c,如下所示。//处理Intra16x16宏块
//采用4x4的IDCT
//最后的“16”代表内部循环处理16次
//输入为block,输出为dst
void FUNCC(ff_h264_idct_add16intra)(uint8_t *dst, const int *block_offset, int16_t *block, int stride, const uint8_t nnzc[15*8]){
int i;
for(i=0; i<16; i++){
if(nnzc[ scan8[i] ]) FUNCC(ff_h264_idct_add )(dst + block_offset[i], block + i*16*sizeof(pixel), stride);
else if(((dctcoef*)block)[i*16]) FUNCC(ff_h264_idct_dc_add)(dst + block_offset[i], block + i*16*sizeof(pixel), stride);
}
}可以看出h264_idct_add16intra()的机制与ff_h264_idct_add16_8_c()是类似的,只是有一些细节的差别:它们都是把16x16的块分割为16个4x4的块,然后分别进行4x4DCT反变换。
至此FFmpeg H.264解码器的帧内宏块(Intra)解码相关的代码就基本分析完毕了。总而言之帧内预测宏块的解码就是“预测+残差”的处理流程。下一篇文章分析帧间宏块(Inter)解码的代码。
雷霄骅
leixiaohua1020@126.com
http://blog.csdn.net/leixiaohua1020














 4091
4091











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









