







对于一般的力学问题,有两种思路,一种是从局部出发,研究每一个质点或者微元的状态。一种是从整体出发,研究物体整体的性质。前者很自然的将问题抽象得到了微分方程,后者往往对应一个最小作用量原理,如弹性问题的最小势能原理。
最小势能原理是结构力学中的一个基本原理。它表明,对于一个在外力作用下的弹性体,平衡状态下的势能是所有可能的位移场中的最小值。为了推导出最小势能原理,我们可以从虚功原理出发,通过变分法来证明。
总势能定义
在弹性体中,总势能
Π
\Pi
Π 包括应变能和外力势能。其表达式为:
Π
=
U
−
W
\Pi = U - W
Π=U−W
其中:
- U U U 是系统的应变能。
-
W
W
W 是外力做的功。
应变能和外力做功的表达式
应变能
U
U
U 可以表示为:
U
=
1
2
∫
Ω
σ
:
ϵ
d
Ω
U = \frac{1}{2} \int_\Omega \sigma : \epsilon \, d\Omega
U=21∫Ωσ:ϵdΩ
其中,
σ
\sigma
σ 是应力张量,
ϵ
\epsilon
ϵ 是应变张量。
外力做功
W
W
W 可以表示为:
W
=
∫
Ω
b
⋅
u
d
Ω
+
∫
∂
Ω
t
t
⋅
u
d
S
W = \int_\Omega b \cdot u \, d\Omega + \int_{\partial\Omega_t} t \cdot u \, dS
W=∫Ωb⋅udΩ+∫∂Ωtt⋅udS
其中,
b
b
b 是体力,
u
u
u 是位移,
t
t
t 是表面力。
总势能的变分
考虑总势能
Π
\Pi
Π 的变分
δ
Π
\delta \Pi
δΠ:
δ
Π
=
δ
U
−
δ
W
\delta \Pi = \delta U - \delta W
δΠ=δU−δW
其中:
δ
U
=
1
2
∫
Ω
(
σ
:
δ
ϵ
+
δ
σ
:
ϵ
)
d
Ω
\delta U = \frac{1}{2}\int_\Omega (\sigma : \delta \epsilon+\delta \sigma : \epsilon) \, d\Omega
δU=21∫Ω(σ:δϵ+δσ:ϵ)dΩ
将
σ
=
C
:
ϵ
\sigma = C : \epsilon
σ=C:ϵ 带入上式:
δ
U
=
1
2
∫
Ω
(
C
:
ϵ
:
δ
ϵ
+
C
:
δ
ϵ
:
ϵ
)
d
Ω
=
∫
Ω
C
:
ϵ
:
δ
ϵ
d
Ω
=
∫
Ω
σ
:
δ
ϵ
d
Ω
\delta U = \frac{1}{2}\int_\Omega (C : \epsilon : \delta \epsilon+ C:\delta \epsilon: \epsilon) \, d\Omega = \int_\Omega C : \epsilon : \delta \epsilon \, d\Omega =\int_\Omega \sigma : \delta \epsilon \, d\Omega
δU=21∫Ω(C:ϵ:δϵ+C:δϵ:ϵ)dΩ=∫ΩC:ϵ:δϵdΩ=∫Ωσ:δϵdΩ
δ
W
=
∫
Ω
b
⋅
δ
u
d
Ω
+
∫
∂
Ω
t
t
⋅
δ
u
d
S
\delta W = \int_\Omega b \cdot \delta u \, d\Omega + \int_{\partial\Omega_t} t \cdot \delta u \, dS
δW=∫Ωb⋅δudΩ+∫∂Ωtt⋅δudS
将应变能和外力做功的变分代入总势能的变分中:
δ
Π
=
∫
Ω
σ
:
δ
ϵ
d
Ω
−
(
∫
Ω
b
⋅
δ
u
d
Ω
+
∫
∂
Ω
t
t
⋅
δ
u
d
S
)
\delta \Pi = \int_\Omega \sigma : \delta \epsilon \, d\Omega - \left( \int_\Omega b \cdot \delta u \, d\Omega + \int_{\partial\Omega_t} t \cdot \delta u \, dS \right)
δΠ=∫Ωσ:δϵdΩ−(∫Ωb⋅δudΩ+∫∂Ωtt⋅δudS)
利用虚功原理
根据虚功原理,对于任意虚位移场
δ
u
\delta u
δu ,有:
∫
Ω
σ
:
δ
ϵ
d
Ω
=
∫
Ω
b
⋅
δ
u
d
Ω
+
∫
∂
Ω
t
t
⋅
δ
u
d
S
\int_\Omega \sigma : \delta \epsilon \, d\Omega = \int_\Omega b \cdot \delta u \, d\Omega + \int_{\partial\Omega_t} t \cdot \delta u \, dS
∫Ωσ:δϵdΩ=∫Ωb⋅δudΩ+∫∂Ωtt⋅δudS
我们得到:
δ
Π
=
0
\delta \Pi = 0
δΠ=0
这表明,在平衡状态下,总势能
Π
\Pi
Π 的一阶变分为零。这意味着,总势能在平衡状态下取极值。
最小势能原理
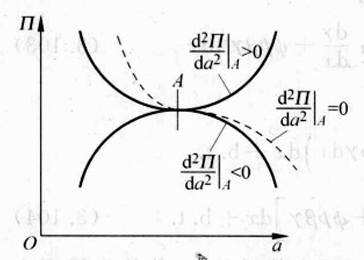
注意,上面的步骤推导出总势能的一阶变分为零,只能说明势能取极值,而无法说明势能取极小值。不过,我们可以从能量的角度想一下,如果平衡状态的能量取极大值,而非平衡状态的能量更小,那这个世界感觉要乱套了。数学上的证明需要能量的二阶变分是否大于零。
势能的二阶变分推导
计算总势能的二阶变分
δ
2
Π
\delta^2 \Pi
δ2Π:
δ
2
Π
=
δ
(
δ
Π
)
\delta^2 \Pi = \delta (\delta \Pi)
δ2Π=δ(δΠ)
我们需要对
δ
Π
\delta \Pi
δΠ 再进行一次变分。首先计算 应变能的二阶变分
δ
2
U
\delta^2 U
δ2U 为:
δ
2
U
=
δ
(
∫
Ω
σ
:
δ
ϵ
d
Ω
)
\delta^2 U = \delta \left( \int_\Omega \sigma : \delta \epsilon \, d\Omega \right)
δ2U=δ(∫Ωσ:δϵdΩ)
由于应力
σ
\sigma
σ 是应变
ϵ
\epsilon
ϵ 的函数,并且
σ
=
C
:
ϵ
\sigma = C : \epsilon
σ=C:ϵ,其中
C
C
C 是弹性刚度张量,
ϵ
=
∇
u
\epsilon = \nabla u
ϵ=∇u 是位移的函数,所以
δ
σ
=
C
:
δ
ϵ
\delta \sigma = C : \delta \epsilon
δσ=C:δϵ。因此:
δ
2
U
=
∫
Ω
δ
σ
:
δ
ϵ
d
Ω
\delta^2 U = \int_\Omega \delta \sigma : \delta \epsilon \, d\Omega
δ2U=∫Ωδσ:δϵdΩ
代入
δ
σ
=
C
:
δ
ϵ
\delta \sigma = C : \delta \epsilon
δσ=C:δϵ,我们得到:
δ
2
U
=
∫
Ω
(
C
:
δ
ϵ
)
:
δ
ϵ
d
Ω
\delta^2 U = \int_\Omega (C : \delta \epsilon) : \delta \epsilon \, d\Omega
δ2U=∫Ω(C:δϵ):δϵdΩ
外力做功的二阶变分
δ
2
W
\delta^2 W
δ2W 为:
δ
2
W
=
δ
(
∫
Ω
b
⋅
δ
u
d
Ω
+
∫
∂
Ω
t
t
⋅
δ
u
d
S
)
\delta^2 W = \delta \left( \int_\Omega b \cdot \delta u \, d\Omega + \int_{\partial \Omega_t} t \cdot \delta u \, dS \right)
δ2W=δ(∫Ωb⋅δudΩ+∫∂Ωtt⋅δudS)
由于
b
b
b 和
t
t
t 是常量,它们的变分为零,因此:
δ
2
W
=
∫
Ω
b
⋅
δ
(
δ
u
)
d
Ω
+
∫
∂
Ω
t
t
⋅
δ
(
δ
u
)
d
S
\delta^2 W = \int_\Omega b \cdot \delta (\delta u) \, d\Omega + \int_{\partial \Omega_t} t \cdot \delta (\delta u) \, dS
δ2W=∫Ωb⋅δ(δu)dΩ+∫∂Ωtt⋅δ(δu)dS
实际上,由于
δ
(
δ
u
)
\delta (\delta u)
δ(δu) 为零,所以
δ
2
W
=
0
\delta^2 W = 0
δ2W=0。
结合
δ
2
U
\delta^2 U
δ2U 和
δ
2
W
\delta^2 W
δ2W,我们得到总势能的二阶变分
δ
2
Π
\delta^2 \Pi
δ2Π 为:
δ
2
Π
=
δ
2
U
−
δ
2
W
=
∫
Ω
(
C
:
δ
ϵ
)
:
δ
ϵ
d
Ω
=
2
∫
Ω
U
(
δ
ϵ
)
d
Ω
\delta^2 \Pi = \delta^2 U - \delta^2 W = \int_\Omega (C : \delta \epsilon) : \delta \epsilon \, d\Omega = 2\int_\Omega U(\delta \epsilon) \, d\Omega
δ2Π=δ2U−δ2W=∫Ω(C:δϵ):δϵdΩ=2∫ΩU(δϵ)dΩ
可得,应变能二阶变分等于应变变分产生的应变能,由于应变能是正定的,所以。
总结
最小势能原理说明,在弹性体的平衡状态下,系统的总势能达到极小值。这一结论为结构分析和有限元方法提供了理论基础,通过变分法,我们能够求解平衡状态下的位移场和应力场。由于本文使用了线弹性本构方程,所以上面推导适用范围为线弹性体,但是关于最小势能原理还有更多的值得探讨的主题:
- 如何通过最小势能原理求解平衡方程?
- 最小势能原理的适用范围是什么? 对于非线弹性体是否能够推广?

















 528
528

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









