






此系列文章用于记录和回顾开发越位线系统的过程,平时工作较忙,有空时更新。
越位线技术
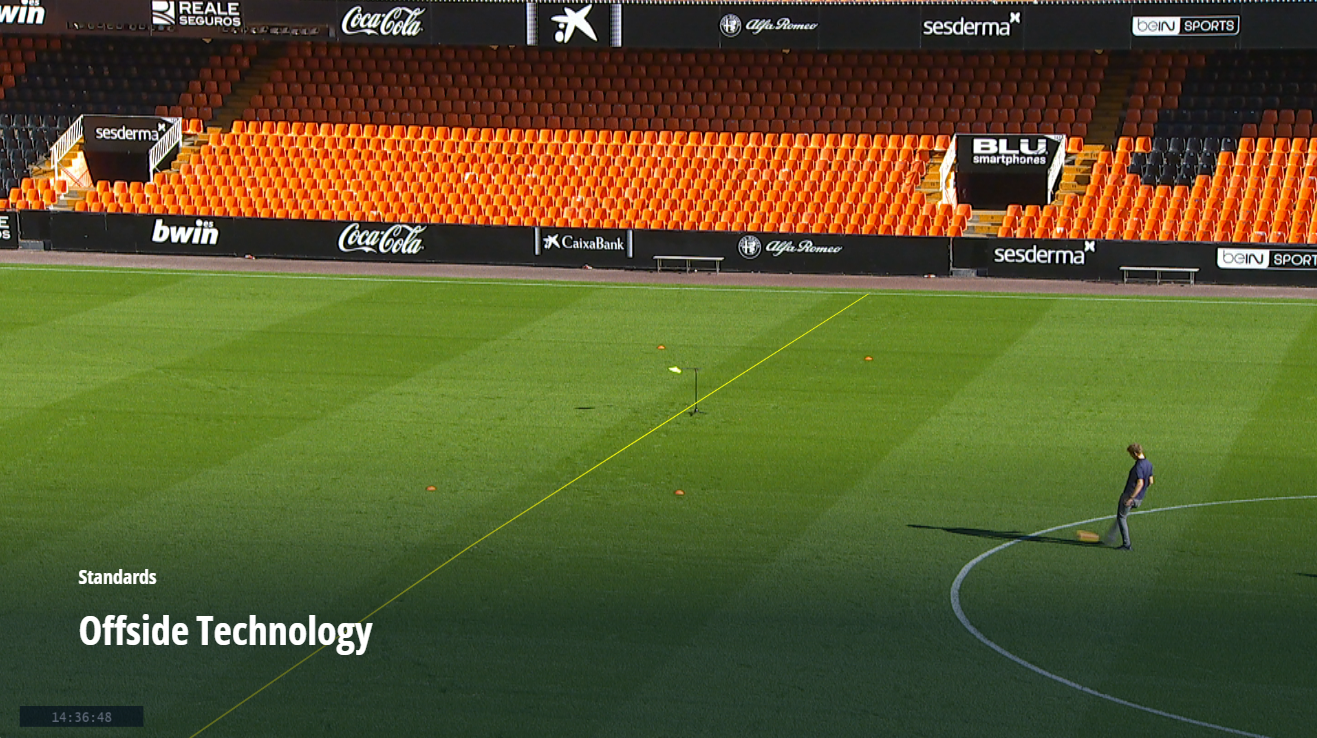
越位技术已被用于图形化分析足球中潜在的越位情况。
自 2018 年将视频助理裁判 (VAR) 引入比赛规则以来,人们越来越关注准确确定越位并根据这些越位做出自信决定的能力。国际足联在 2016 年至 2019 年间进行的研究表明,此类虚拟线最常见的误差来源是场地的地形(尤其是场地外倾角)、摄像机角度失真、球员遮挡和跟踪单个身体部位的问题。
虚拟越位线技术归属于裁判技术,另外两项裁判技术是视频助理裁判技术和球门线技术。
下面的视频是FIFA的越位线技术介绍,我在实际开发越位线技术的过程中研究了该视频内容的细节无数次。。
FIFA认证
虚拟越位线技术要想在比赛中使用首先要获得FIFA认证,认证流程如下
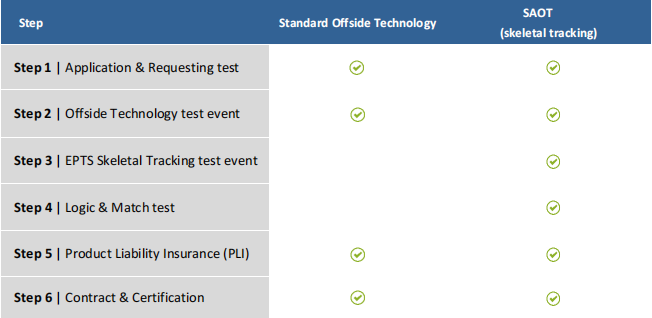
这是2023年发布的标准中的认证流程,右边分为Standard和SAOT,SAOT是引入了骨骼跟踪的半自动越位线技术,在23年的测试中SAOT属于可选项,取得Standard认证即可在赛事中使用,实际在现场真正参加SAOT测试的也只有Hawk一家。
那这两个有什么区别呢?看下面两张图,区别就在左上角的图标上,一个是FIFA QUALITY,一个是FIFA QUALITY PRO。

遗憾的事,这项技术曾经也是被国外垄断的,其实基本也就是一家公司-英国鹰眼(Hawk-eye),该公司2011年被索尼收购,现在业内基本都都喊他索尼。
我们从20年启动到23年拿到认证用了3年时间,共参加了3次测试,2次远程(疫情出不去),1次现场,第三次也就是23年在德国现场测试的时候拿到了Standard认证。从23年开始,认证周期也改成了4年一次,也就是说下次认证在27年。
FIFA越位线认证测试内容
项目启动对于技术人来说,最重要的还是要搞清楚认证测试内容,才能开展后续的软件设计开发工作。
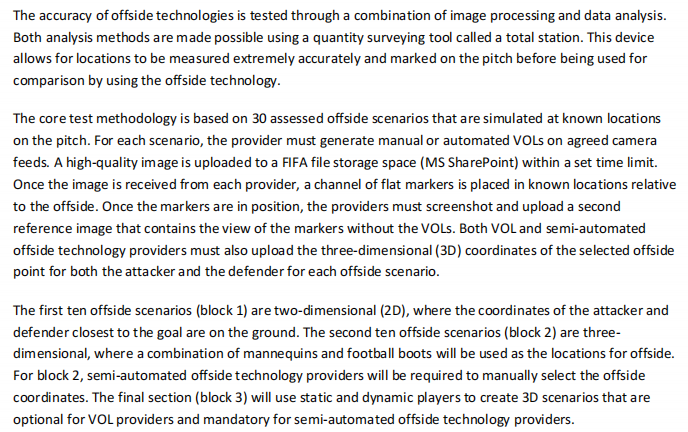
简单点说,在一个球场内需要测试20个场景,也就是说需要绘制20次越位线。其中2D场景10次,3D场景10次。那么如何判断绘制越位线的准确度呢,官方会预先使用全站仪在场地中测量出越位线的位置,然后在两侧放置marker标记。如下图所示
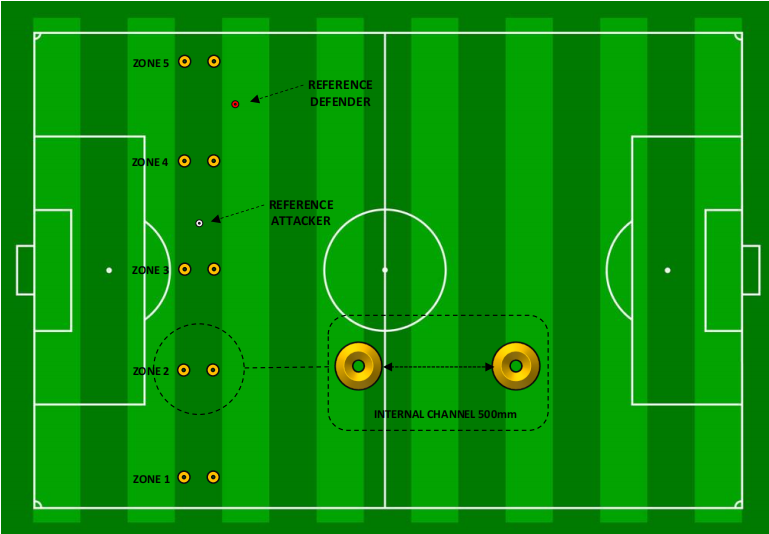
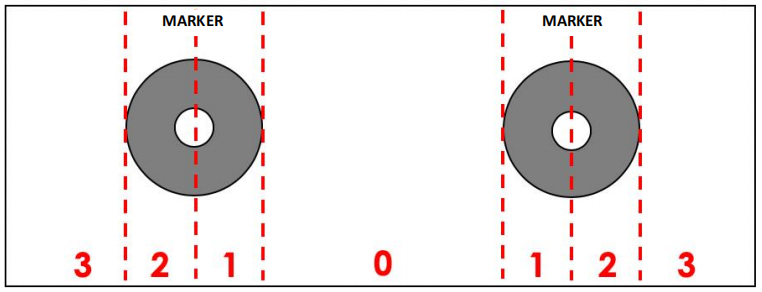
评分通过marker标记(直径10cm)评估,越位线经过marker靠内侧区域扣1分、外侧区域2分、超出marker 3分,扣分总分超过10分即考试失败,只要有一次越位线超出marker也是考试失败。
什么是2D测试和3D测试呢,测试中也称为block1和block2。block1视频画面范围较大,越位线长度贯穿整个球场68米,绘制参考是球员踩在地上的脚,不存在找地面投影点的问题,marker内边缘间距50cm。block2视频画面范围相对较小,越位线长度不低于20米,绘制参考是一个悬空的球鞋,marker间距40cm。
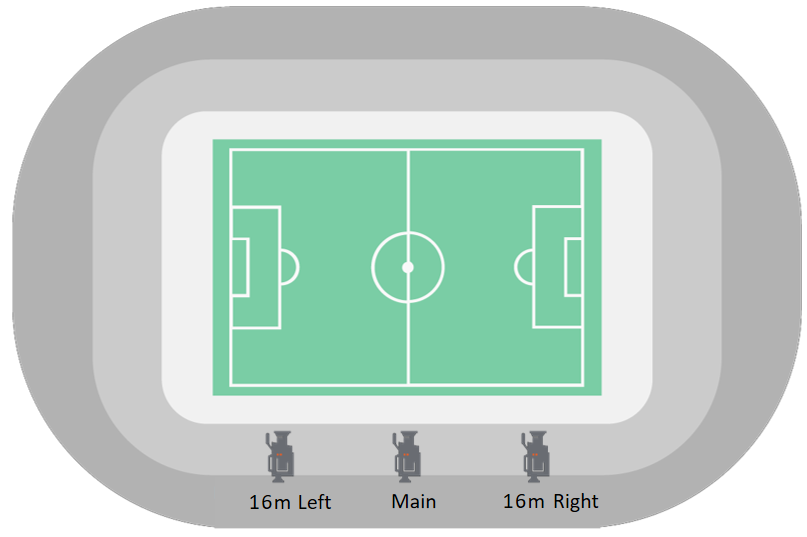
block1和block2单独计分。每个block绘制10个场景,20张图像,每个场景绘制两张。如下图,场地至少3个越位线相机,分别是左16米相机、主相机、右16米相机,当球员在左半场时,需要在左16米相机和主相机绘制,在右半场同理。
这里分析一下,block1-2D场景越位线绘制68米,这样的话上下边线都在画面中,画面分辨率为1080p,那么画面高度1080个像素至少拍摄了68米的范围,换算一下平均像素精度低于6.3cm,距离相机较远的上半场精度将更低(尤其是主相机、球员在左上角),超过10cm。两个marker之间的距离是50公分,则误差允许范围是正负25cm,允许误差在1-2个像素,操作绘制时用鼠标选球员脚尖位置。这时放大后选择脚尖,图像可能是糊的。
这里还有一个线宽的问题,需要交代,由于是提交的是包含越位线的图像,线是由像素点组成的,验收结果时以线前缘为准(靠近球门线的方向)。
block2-3D场景绘制范围较小,大于20米,允许误差正负20cm,困难的是,画面内容少,球鞋悬空,找到球鞋前端的地面投影点比较有挑战,另外相机画面内容少,给相机参数求解带来困难。
相机由摄影师控制跟随比赛移动,对应到CV上代表内参、外参、畸变系数均在实时变化,而能拿到的信息只有过来的视频流,需要在这种条件下完成相机的参数求解工作。这时可参考的信息只有球场的先验参数,比如场地的尺寸,白线的位置。FIFA球场尺寸的标准并非固定数据而是范围,另外球场不平,为了排水会设计坡度,这些也给求解带来的较大的困难。

蓝色未考虑坡度


















 508
508

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











