






网上有好多关于DMA的原理介绍文章,这里不再介绍了,直接上干货。
但是网上的例子都 是很简单的,没有实用价值,而且还容易丢包,所以自己写了一个,经过测试不会丢包了。写得不好请见谅。
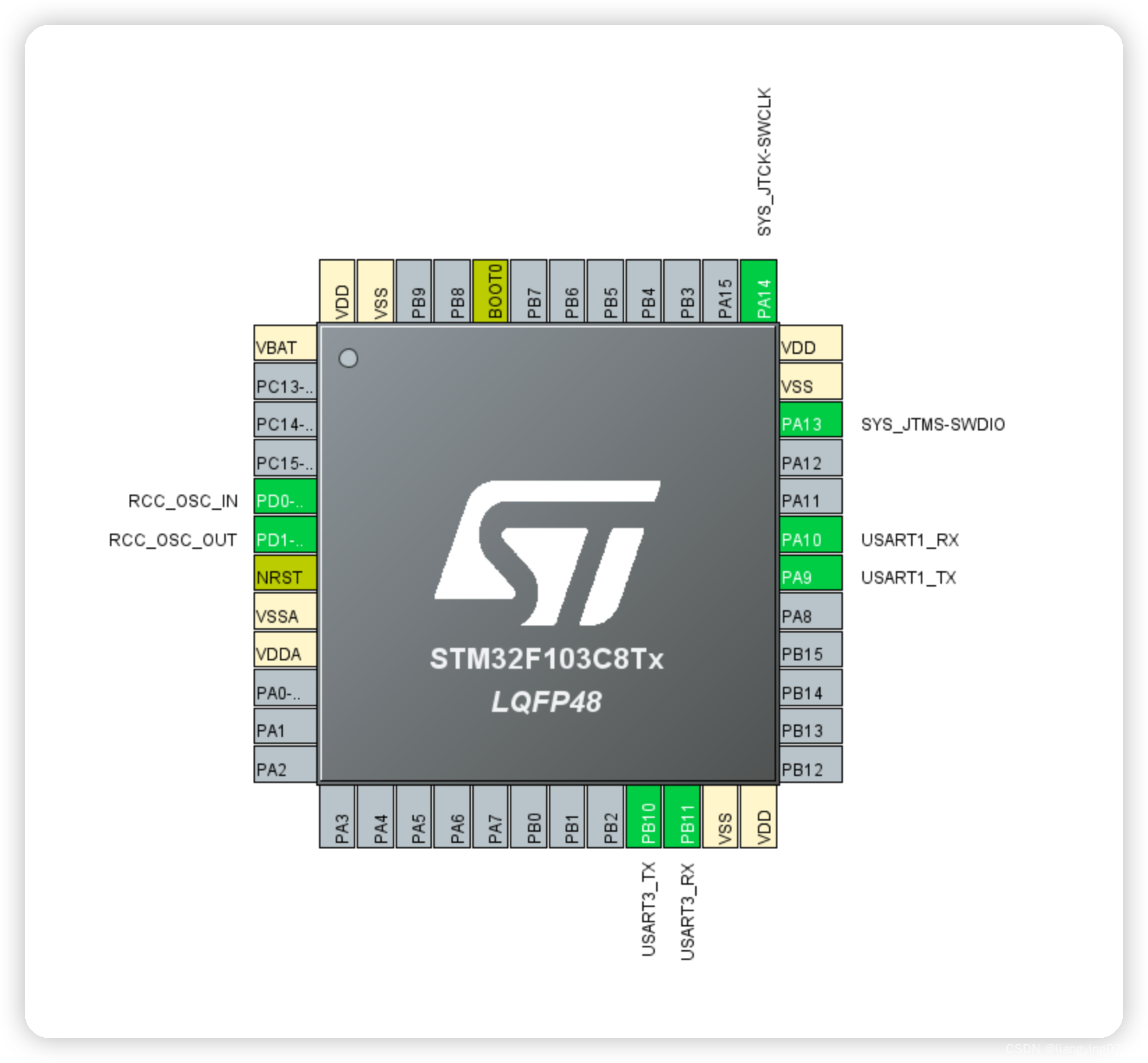
STM32CUBE配置串口1与串口3的DMA,因为是Demo,所以只配置用到的内容
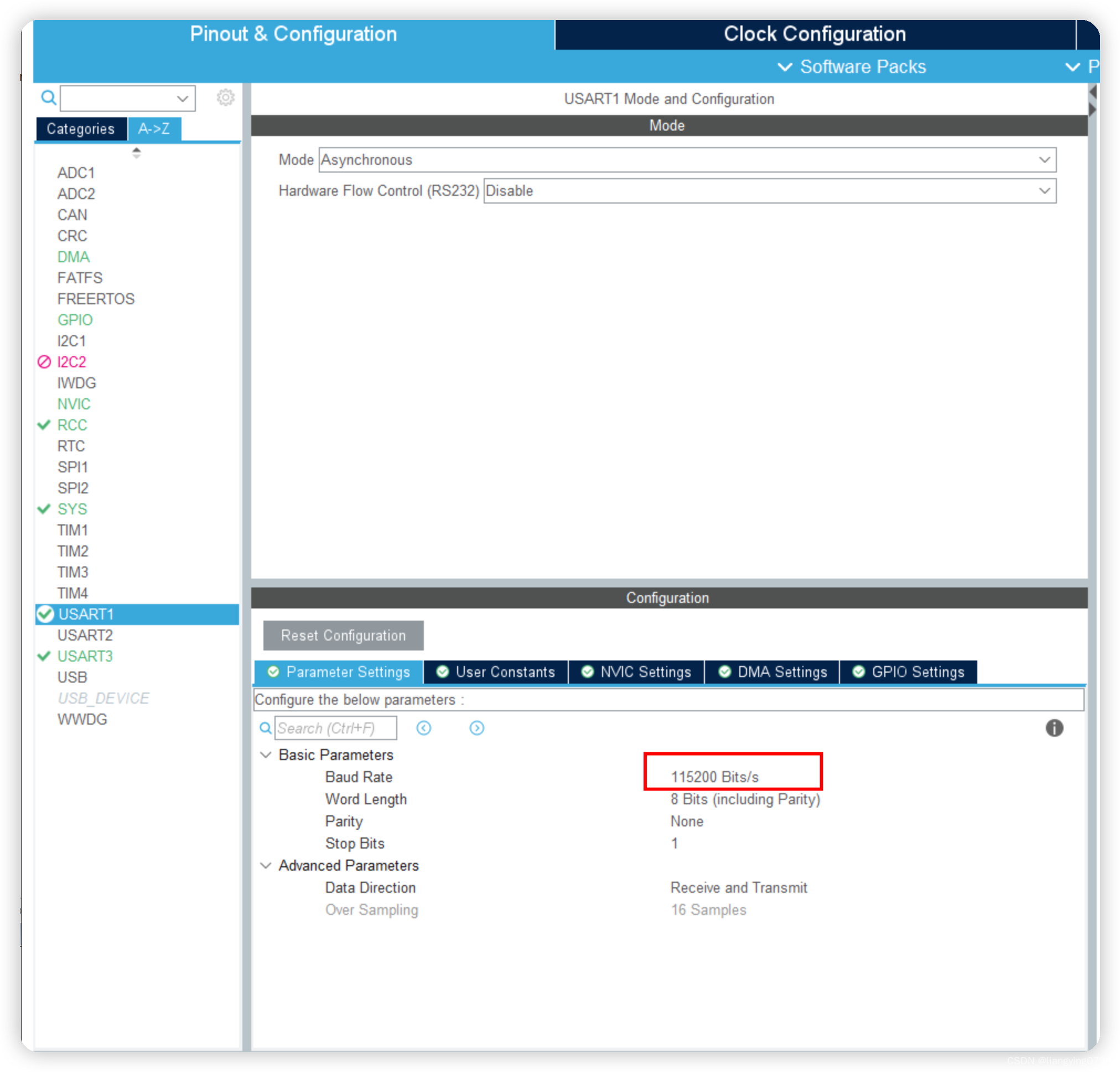
配置串口波特率, 这里只截取一个图片,因为串口1与串口3的波特率设置是一样的
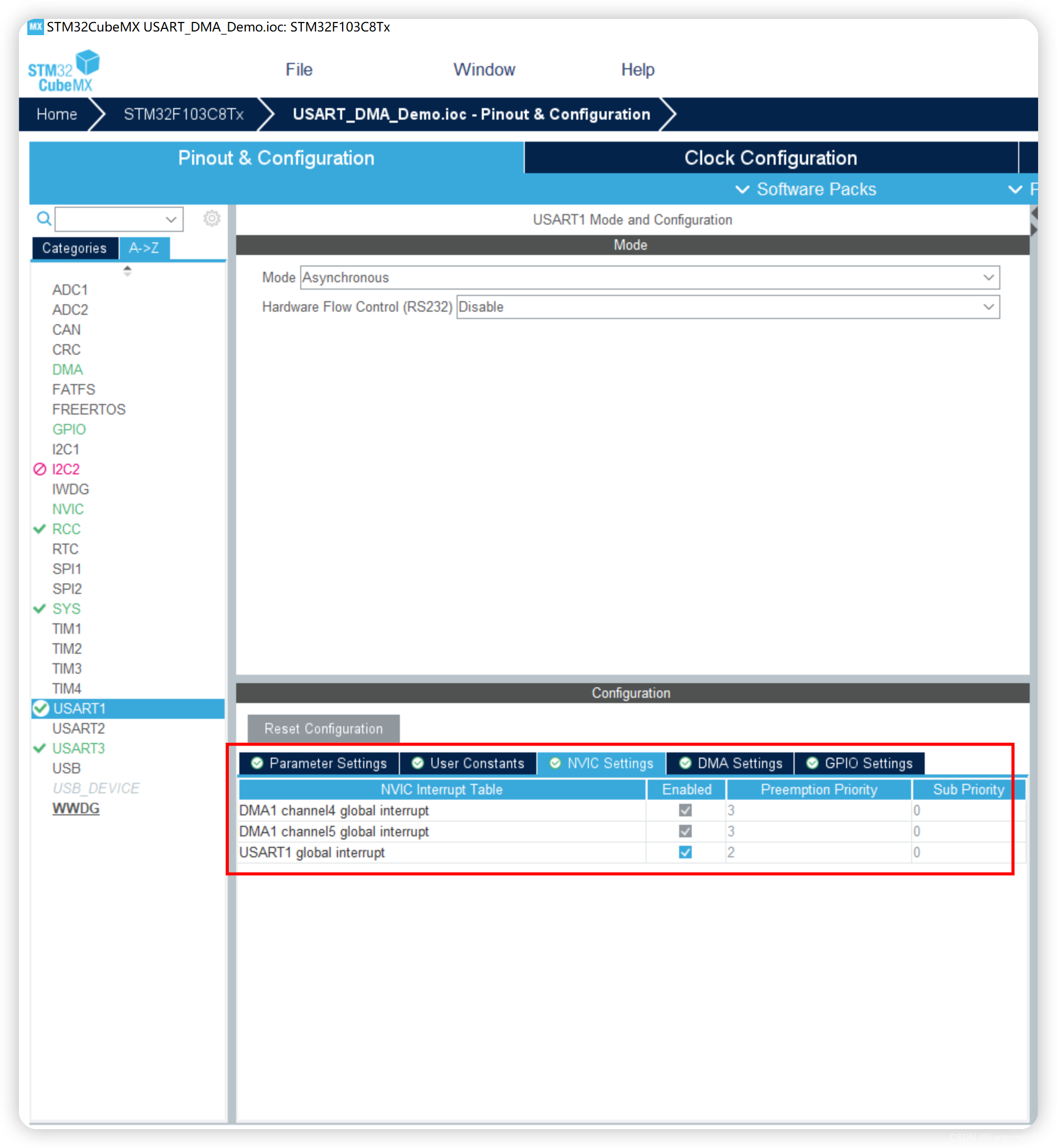
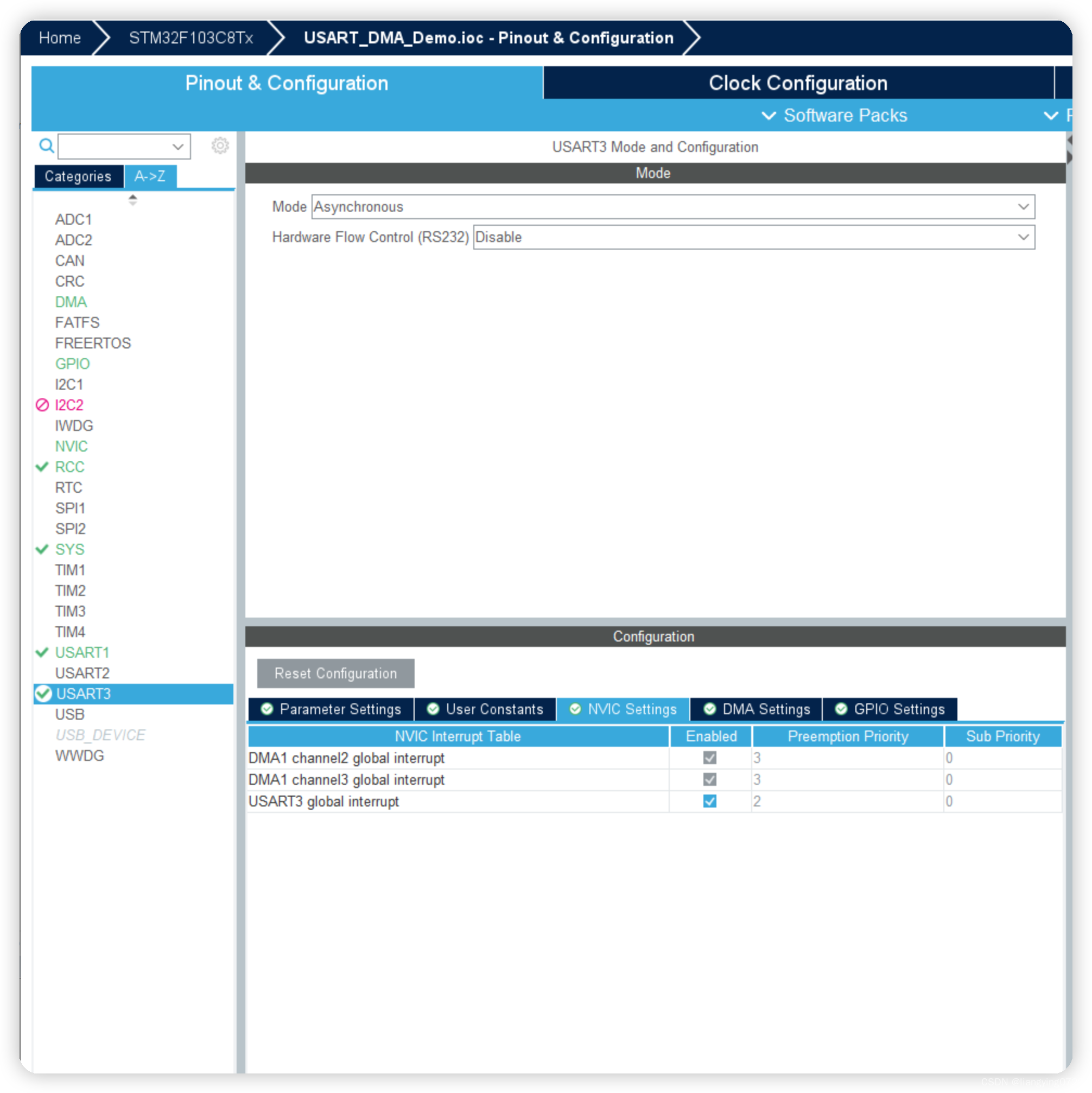
串口1 DMA的中断设置,级别设置成3 ,串口3DMA的中断设置,也是如此
串口1的DMA设置 ,接收速度 可以设置成LOW或Dedium或high,看你自己需求设置
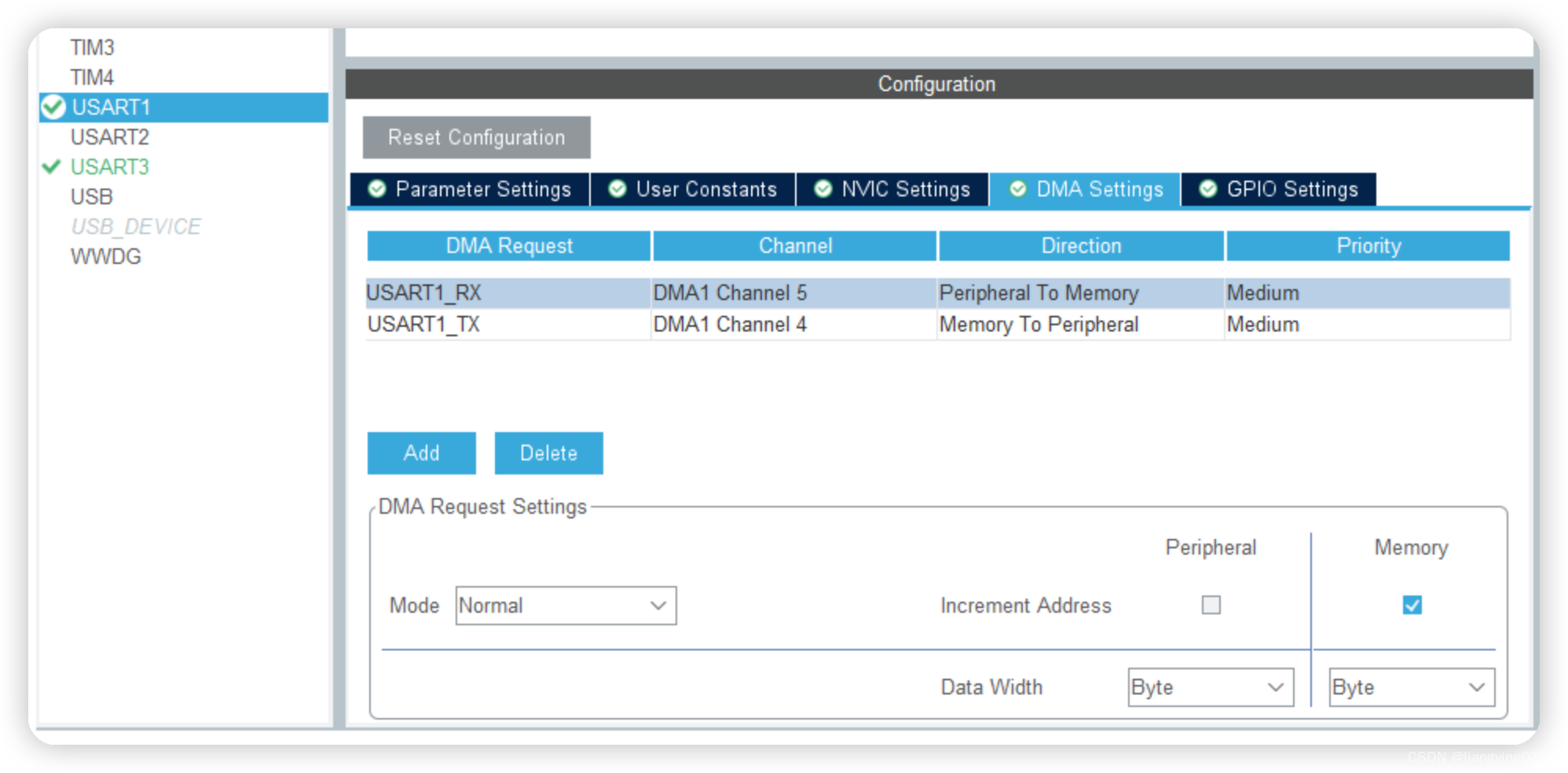
串口3的DMA设置 ,接收速度 可以设置成LOW或Dedium或high,看你自己需求设置

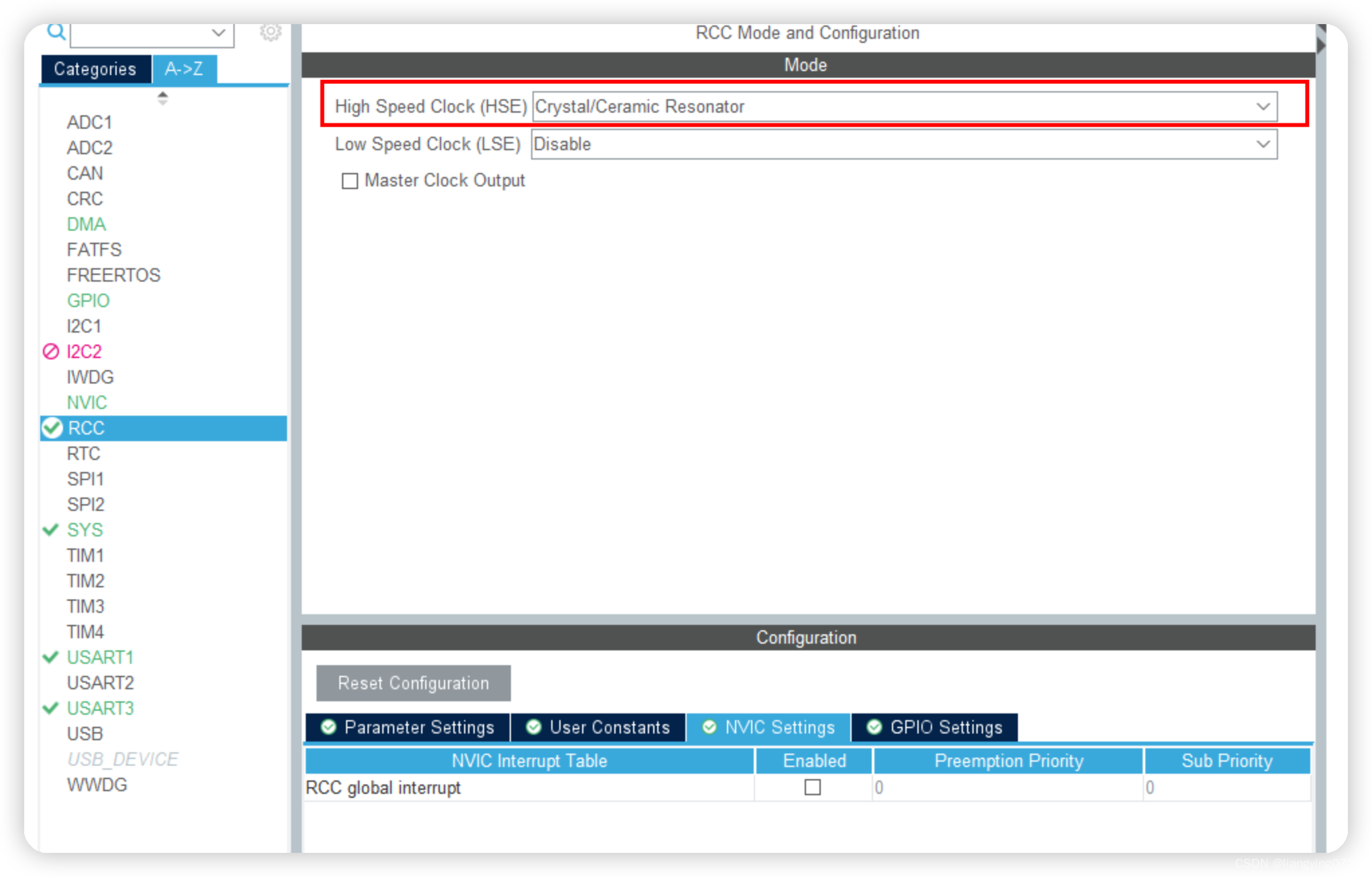
RCC设置一下
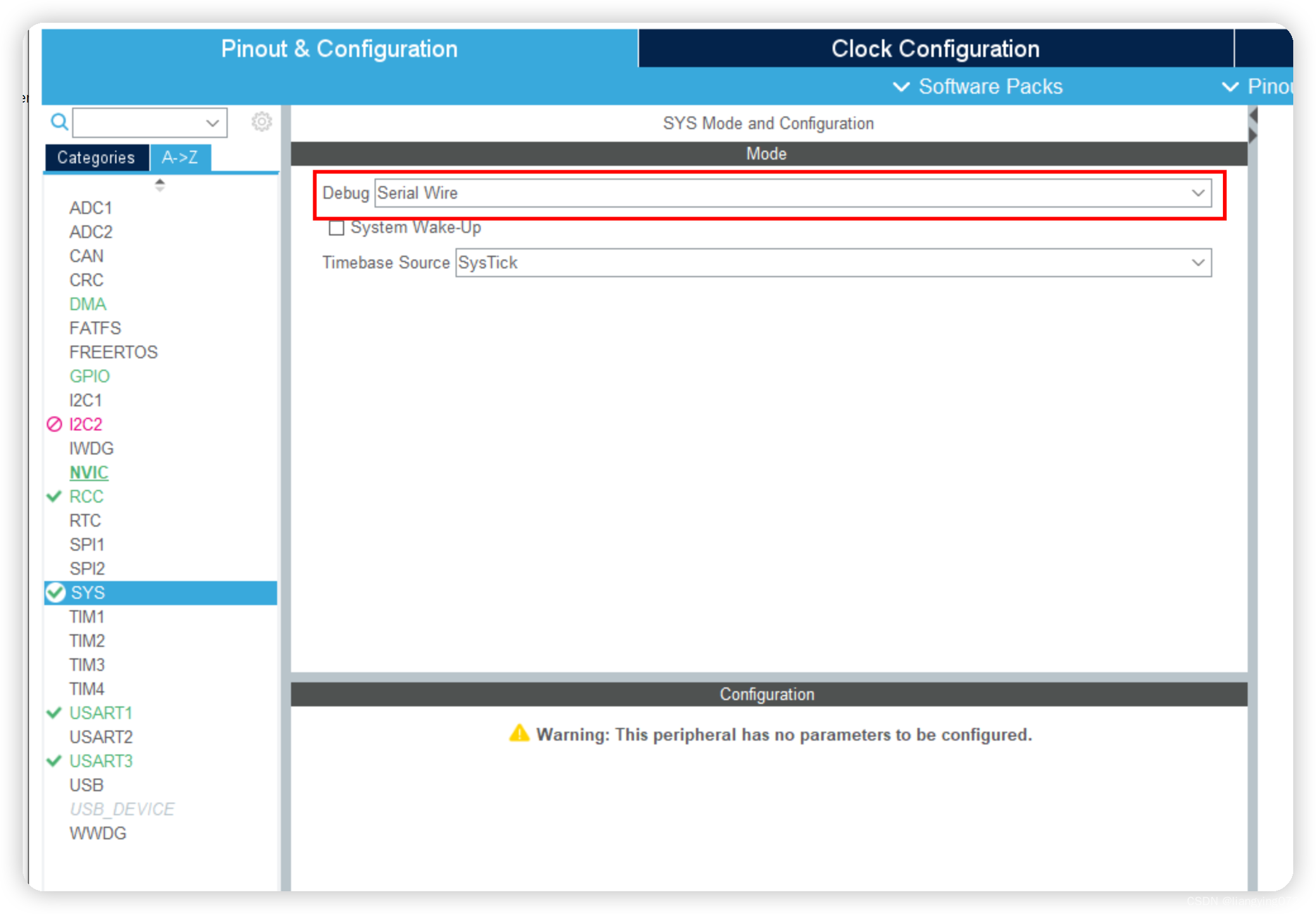
SYS设置一下,
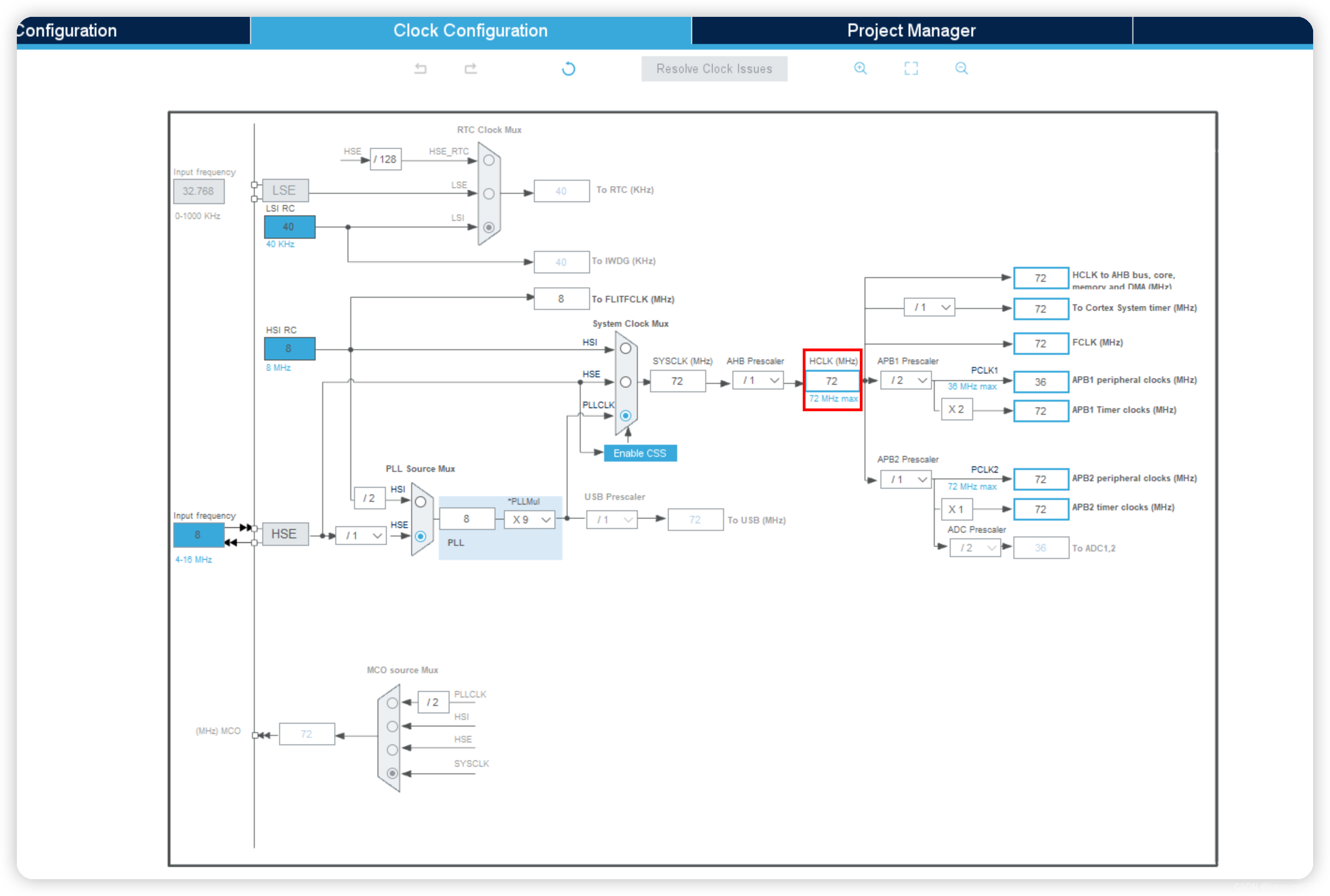
时钟再设置一下,因为我是有外部晶振,这里直接在红框里写上72,然后敲回车,就自己配置好了 ,
然后就是工程设置了,这里就直接截图了,没有啥套路
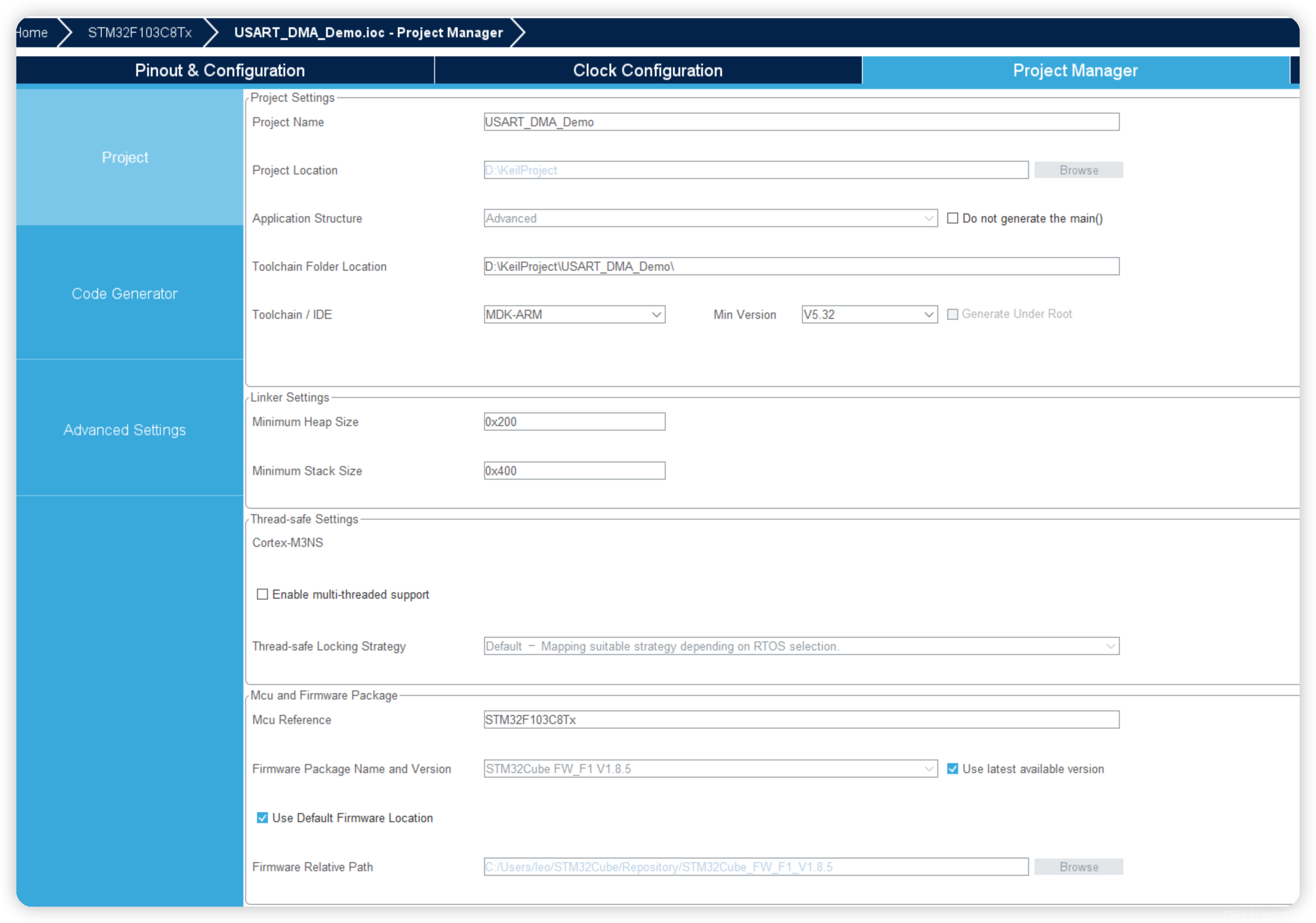
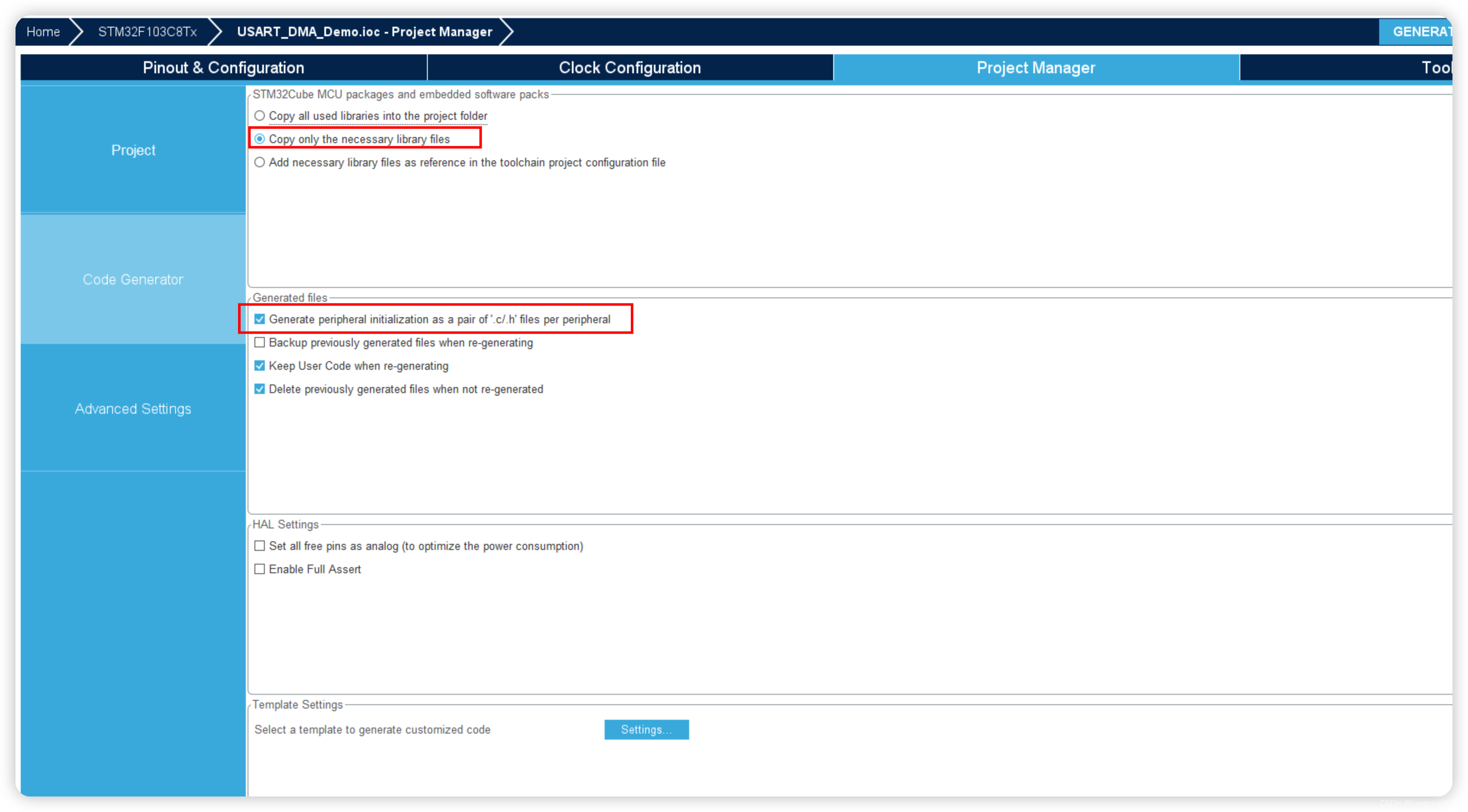
然后就可以 GENERATE CODE了。
生成 工程后,打开工程,开始编写DEMO, 我这里将关键代码 直接贴出来
1。先写一个头文件 common_types.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file common_types.h
* @brief This file contains all the function prototypes for
* the usart.c file
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __COMMON_TYPES_H__
#define __COMMON_TYPES_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "stm32f1xx_hal.h"
/* USER CODE BEGIN Includes */
#define DEBUG_FLAG 1 //print uart1 flag 1:print 0:no print
#define UART_BANDRATE 115200
#define BUFFERSIZE 2048 //接收数据缓存区的大小
//目的是为了不让接收出现接收完成中断(回调),这样容易出现两次判断点,所以+1 大于单次接收的长度,保证只产生空闲中断(回调)
#define RX_MAX 1600 // //单次接收最大量 预计单次接收数据的最大值+1,
#define NUM 4 //se指针对结构体数组长度
typedef struct{
uint8_t *start; //s用于标记起始位置
uint8_t *end; //e用于标记结束位置
}LCB; //se指针对结构体
typedef struct{
uint32_t RxCounter; //累计接收数据量
uint32_t TxCounter; //累计接收数据量
uint32_t TxState; //发送数据状态 0:表示空闲 1:表示忙碌
LCB RxLocation[NUM]; //se指针对结构体数组
LCB TxLocation[NUM]; //se指针对结构体数组
LCB *RxInPtr; //指针 用于标记接收数据
LCB *RxOutPtr; //OUT指针 用于提取接收的数据
LCB *RxEndPtr; //IN和OUT指针的结尾标志
LCB *TxInPtr; //指针 用于标记发送数据
LCB *TxOutPtr; //OUT指针 用于提取发送的数据
LCB *TxEndPtr; //IN和OUT指针的结尾标志
UART_HandleTypeDef uart;
DMA_HandleTypeDef hdma_usart_rx; //dmarx
DMA_HandleTypeDef hdma_usart_tx; //dmatx
}UCB; //串口控制结构体
#ifdef __cplusplus
}
#endif
#endif /* __COMMON_TYPES_H__ */
2.修改USART.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.h
* @brief This file contains all the function prototypes for
* the usart.c file
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __USART_H__
#define __USART_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "common_types.h"
extern uint8_t UART1_RxBuff[BUFFERSIZE]; //接收缓冲区长度
extern uint8_t UART1_TxBuff[BUFFERSIZE]; //发送缓冲区长度
extern uint8_t UART3_RxBuff[BUFFERSIZE];
extern uint8_t UART3_TxBuff[BUFFERSIZE];
/* USER CODE END Includes */
/* USER CODE BEGIN Private defines */
extern UCB huart1; //变量外部声明
extern UCB huart3; //变量外部声明
/* USER CODE END Private defines */
void MX_USART1_UART_Init(uint32_t bandrate);
void MX_USART3_UART_Init(uint32_t bandrate);
/* USER CODE BEGIN Prototypes */
void USART_PrtInit(UCB *huart, uint8_t * USART_RxBuff, uint8_t * USART_TxBuff);
void USART_TxData(UCB *huart, uint8_t * USART_TxBuff,uint8_t *data, uint32_t data_len);
void ProcessData(UCB * huart, uint8_t * USART_TxBuff);
//void USART1_PrtInit(void);
//void UART1_TxData(uint8_t *data, uint32_t data_len);
//void USART3_PrtInit(void);
//void UART3_TxData(uint8_t *data, uint32_t data_len);
/* USER CODE END Prototypes */
#ifdef __cplusplus
}
#endif
#endif /* __USART_H__ */
3. 修改USART.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
#include "stdio.h"
#include "string.h"
/* USER CODE BEGIN 0 */
#if 1
#if (__ARMCC_VERSION >= 6010050) /* 使用AC6编译器时 */
__asm(".global __use_no_semihosting\n\t"); /* 声明不使用半主机模式 */
__asm(".global __ARM_use_no_argv \n\t"); /* AC6下需要声明main函数为无参数格式,否则部分例程可能出现半主机模式 */
#else
/* 使用AC5编译器时, 要在这里定义__FILE 和 不使用半主机模式 */
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
/* Whatever you require here. If the only file you are using is */
/* standard output using printf() for debugging, no file handling */
/* is required. */
};
#endif
/* 不使用半主机模式,至少需要重定义_ttywrch\_sys_exit\_sys_command_string函数,以同时兼容AC6和AC5模式 */
int _ttywrch(int ch)
{
ch = ch;
return ch;
}
/* 定义_sys_exit()以避免使用半主机模式 */
void _sys_exit(int x)
{
x = x;
}
char *_sys_command_string(char *cmd, int len)
{
return NULL;
}
/* FILE 在 stdio.h里面定义. */
FILE __stdout;
/* MDK下需要重定义fputc函数, printf函数最终会通过调用fputc输出字符串到串口 */
int fputc(int ch, FILE *f)
{
if(DEBUG_FLAG)
{
while ((USART1->SR & 0X40) == 0); /* 等待上一个字符发送完成 */
USART1->DR = (uint8_t)ch; /* 将要发送的字符 ch 写入到DR寄存器 */
}
return ch;
}
#endif
/* USER CODE END 0 */
uint8_t UART1_RxBuff[BUFFERSIZE]; //串口1接收缓冲区
uint8_t UART1_TxBuff[BUFFERSIZE]; //串口1发送缓冲区
uint8_t UART3_RxBuff[BUFFERSIZE]; //串口3接收缓冲区
uint8_t UART3_TxBuff[BUFFERSIZE]; //串口3发送缓冲区
UCB huart1; //串口1控制结构体
UCB huart3; //串口3控制结构体
/* USART1 init function */
void MX_USART1_UART_Init(uint32_t bandrate)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.uart.Instance = USART1;
huart1.uart.Init.BaudRate = bandrate; //设置波特率
huart1.uart.Init.WordLength = UART_WORDLENGTH_8B; //8位数据位
huart1.uart.Init.StopBits = UART_STOPBITS_1; //1个停止位
huart1.uart.Init.Parity = UART_PARITY_NONE; //不使用校验位
huart1.uart.Init.Mode = UART_MODE_TX_RX; //收发开启
huart1.uart.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.uart.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1.uart) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
USART_PrtInit(&huart1,UART1_RxBuff,UART1_TxBuff);
//USART1_PrtInit();
/* USER CODE END USART1_Init 2 */
}
/* USART3 init function */
void MX_USART3_UART_Init(uint32_t bandrate)
{
/* USER CODE BEGIN USART3_Init 0 */
/* USER CODE END USART3_Init 0 */
/* USER CODE BEGIN USART3_Init 1 */
/* USER CODE END USART3_Init 1 */
huart3.uart.Instance = USART3;
huart3.uart.Init.BaudRate = bandrate;
huart3.uart.Init.WordLength = UART_WORDLENGTH_8B;
huart3.uart.Init.StopBits = UART_STOPBITS_1;
huart3.uart.Init.Parity = UART_PARITY_NONE;
huart3.uart.Init.Mode = UART_MODE_TX_RX;
huart3.uart.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.uart.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart3.uart) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART3_Init 2 */
USART_PrtInit(&huart3,UART3_RxBuff,UART3_TxBuff);
//USART3_PrtInit();
/* USER CODE END USART3_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/* USER CODE BEGIN USART1_MspInit 0 */
__HAL_RCC_DMA1_CLK_ENABLE();
/* USER CODE END USART1_MspInit 0 */
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USART1 DMA Init */
/* USART1_RX Init */
huart1.hdma_usart_rx.Instance = DMA1_Channel5;
huart1.hdma_usart_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
huart1.hdma_usart_rx.Init.PeriphInc = DMA_PINC_DISABLE;
huart1.hdma_usart_rx.Init.MemInc = DMA_MINC_ENABLE;
huart1.hdma_usart_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
huart1.hdma_usart_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
huart1.hdma_usart_rx.Init.Mode = DMA_NORMAL;
huart1.hdma_usart_rx.Init.Priority = DMA_PRIORITY_MEDIUM;
if (HAL_DMA_Init(&huart1.hdma_usart_rx) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(uartHandle,hdmarx,huart1.hdma_usart_rx);
HAL_NVIC_SetPriority(DMA1_Channel5_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel5_IRQn);
/* USART1_TX Init */
huart1.hdma_usart_tx.Instance = DMA1_Channel4;
huart1.hdma_usart_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
huart1.hdma_usart_tx.Init.PeriphInc = DMA_PINC_DISABLE;
huart1.hdma_usart_tx.Init.MemInc = DMA_MINC_ENABLE;
huart1.hdma_usart_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
huart1.hdma_usart_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
huart1.hdma_usart_tx.Init.Mode = DMA_NORMAL;
huart1.hdma_usart_tx.Init.Priority = DMA_PRIORITY_MEDIUM;
if (HAL_DMA_Init(&huart1.hdma_usart_tx) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(uartHandle,hdmatx,huart1.hdma_usart_tx);
/* USER CODE BEGIN USART1_MspInit 1 */
HAL_NVIC_SetPriority(DMA1_Channel4_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel4_IRQn);
/* USER CODE END USART1_MspInit 1 */
}
else if(uartHandle->Instance==USART3)
{
/* USER CODE BEGIN USART3_MspInit 0 */
/* USER CODE END USART3_MspInit 0 */
/* USART3 clock enable */
__HAL_RCC_USART3_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_DMA1_CLK_ENABLE();
/**USART3 GPIO Configuration
PB10 ------> USART3_TX
PB11 ------> USART3_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USART3 interrupt Init */
HAL_NVIC_SetPriority(USART3_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(USART3_IRQn);
/* USART3 DMA Init */
/* USART3_RX Init */
huart3.hdma_usart_rx.Instance = DMA1_Channel3;
huart3.hdma_usart_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
huart3.hdma_usart_rx.Init.PeriphInc = DMA_PINC_DISABLE;
huart3.hdma_usart_rx.Init.MemInc = DMA_MINC_ENABLE;
huart3.hdma_usart_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
huart3.hdma_usart_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
huart3.hdma_usart_rx.Init.Mode = DMA_NORMAL;
huart3.hdma_usart_rx.Init.Priority = DMA_PRIORITY_MEDIUM;
if (HAL_DMA_Init(&huart3.hdma_usart_rx) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(uartHandle,hdmarx,huart3.hdma_usart_rx);
HAL_NVIC_SetPriority(DMA1_Channel3_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel3_IRQn);
/* USART3_TX Init */
huart3.hdma_usart_tx.Instance = DMA1_Channel2;
huart3.hdma_usart_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
huart3.hdma_usart_tx.Init.PeriphInc = DMA_PINC_DISABLE;
huart3.hdma_usart_tx.Init.MemInc = DMA_MINC_ENABLE;
huart3.hdma_usart_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
huart3.hdma_usart_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
huart3.hdma_usart_tx.Init.Mode = DMA_NORMAL;
huart3.hdma_usart_tx.Init.Priority = DMA_PRIORITY_MEDIUM;
if (HAL_DMA_Init(&huart3.hdma_usart_tx) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(uartHandle,hdmatx,huart3.hdma_usart_tx);
/* USER CODE BEGIN USART3_MspInit 1 */
HAL_NVIC_SetPriority(DMA1_Channel2_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel2_IRQn);
/* USER CODE END USART3_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 DMA DeInit */
HAL_DMA_DeInit(uartHandle->hdmarx);
HAL_DMA_DeInit(uartHandle->hdmatx);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
else if(uartHandle->Instance==USART3)
{
/* USER CODE BEGIN USART3_MspDeInit 0 */
/* USER CODE END USART3_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART3_CLK_DISABLE();
/**USART3 GPIO Configuration
PB10 ------> USART3_TX
PB11 ------> USART3_RX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_10|GPIO_PIN_11);
/* USART3 DMA DeInit */
HAL_DMA_DeInit(uartHandle->hdmarx);
HAL_DMA_DeInit(uartHandle->hdmatx);
/* USART3 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART3_IRQn);
/* USER CODE BEGIN USART3_MspDeInit 1 */
/* USER CODE END USART3_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
huart1.TxState = 0;
huart3.TxState = 0;
}
else if(huart->Instance == USART3)
{
huart3.TxState = 0;
huart1.TxState = 0;
}
}
void HAL_UART_AbortReceiveCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
huart1.RxInPtr->end = &UART1_RxBuff[huart1.RxCounter -1];
huart1.RxInPtr++;
if(huart1.RxInPtr == huart1.RxEndPtr)
{
huart1.RxInPtr = &huart1.RxLocation[0];
}
if((BUFFERSIZE - huart1.RxCounter) < RX_MAX)
{
huart1.RxCounter = 0;
huart1.RxInPtr->start = UART1_RxBuff;
}
else
{
huart1.RxInPtr->start = &UART1_RxBuff[huart1.RxCounter];
}
HAL_UART_Receive_DMA(&huart1.uart, huart1.RxInPtr->start, RX_MAX);
}
else if(huart->Instance == USART3)
{
huart3.RxInPtr->end = &UART3_RxBuff[huart3.RxCounter -1];
huart3.RxInPtr++;
if(huart3.RxInPtr == huart3.RxEndPtr)
{
huart3.RxInPtr = &huart3.RxLocation[0];
}
if((BUFFERSIZE - huart3.RxCounter) < RX_MAX)
{
huart3.RxCounter = 0;
huart3.RxInPtr->start = UART3_RxBuff;
}
else
{
huart3.RxInPtr->start = &UART3_RxBuff[huart3.RxCounter];
}
HAL_UART_Receive_DMA(&huart3.uart, huart3.RxInPtr->start, RX_MAX);
}
}
void USART_PrtInit(UCB *huart, uint8_t * USART_RxBuff, uint8_t * USART_TxBuff)
{
huart->RxInPtr = &huart->RxLocation[0]; //IN指针指向SE指针对结构体数组的0号成员
huart->RxOutPtr = &huart->RxLocation[0]; //OUT指针指向SE指针对结构体数组的0号成员
huart->RxEndPtr = &huart->RxLocation[NUM-1]; //END指针指向SE指针对结构体数组的最后一个成员
huart->RxCounter = 0; //累计接收数量清零
huart->RxInPtr->start = USART_RxBuff; //使用IN指针指向的SE指针对中的S指针标记第一次接收的起始位置
huart->TxInPtr = &huart->TxLocation[0]; //IN指针指向SE指针对结构体数组的0号成员
huart->TxOutPtr = &huart->TxLocation[0]; //OUT指针指向SE指针对结构体数组的0号成员
huart->TxEndPtr = &huart->TxLocation[NUM-1]; //END指针指向SE指针对结构体数组的最后一个成员
huart->TxCounter = 0; //累计接收数量清零
huart->TxInPtr->start = USART_TxBuff; //使用IN指针指向的SE指针对中的S指针标记第一次接收的起始位置
huart->TxState = 0; //初始发送状态为空闲
__HAL_UART_ENABLE_IT(&huart->uart, UART_IT_IDLE);
HAL_UART_Receive_DMA(&huart->uart, huart->RxInPtr->start, RX_MAX);
}
void USART_TxData(UCB *huart, uint8_t * USART_TxBuff,uint8_t *data, uint32_t data_len)
{
if((BUFFERSIZE - huart->TxCounter) >= data_len)
{
huart->TxInPtr->start = & USART_TxBuff[huart->TxCounter];
}
else
{
huart->TxCounter = 0;
huart->TxInPtr->start = USART_TxBuff;
}
memcpy(huart->TxInPtr->start, data, data_len);
huart->TxCounter += data_len;
huart->TxInPtr->end = &USART_TxBuff[huart->TxCounter - 1];
huart->TxInPtr++;
if(huart->TxInPtr == huart->TxEndPtr)
{
huart->TxInPtr = &huart->TxLocation[0];
}
}
//此方法是将接收到的数据 ,再返回去, 如果是DEBUG模式,那么返回到串口1里,如果 不是DEBUG模式,就是哪个串口接收就返回哪个串口
//目前 这个方法暂时没有用, 在调试时,可以调用 这个方法
void ProcessData(UCB * huart, uint8_t * USART_TxBuff)
{
if(huart->RxOutPtr != huart->RxInPtr)
{
USART_TxData(huart,USART_TxBuff, huart->RxOutPtr->start, huart->RxOutPtr->end - huart->RxOutPtr->start +1);
huart->RxOutPtr++;
if(huart->RxOutPtr == huart->RxEndPtr)
{
huart->RxOutPtr = &huart->RxLocation[0];
}
}
if((huart->TxOutPtr != huart->TxInPtr) && (huart->TxState == 0))
{
huart->TxState = 1;
if(DEBUG_FLAG)
{
HAL_UART_Transmit_DMA(&huart1.uart, huart->TxOutPtr->start, huart->TxOutPtr->end - huart->TxOutPtr->start +1);
}
else
{
HAL_UART_Transmit_DMA(&huart->uart, huart->TxOutPtr->start, huart->TxOutPtr->end - huart->TxOutPtr->start +1);
}
if(huart->uart.Instance == USART3)
{
//HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin); //led电平翻转
}
huart->TxOutPtr++;
if(huart->TxOutPtr == huart->TxEndPtr)
{
huart->TxOutPtr = &huart->TxLocation[0];
}
}
}
/* USER CODE END 1 */
再修改中断里的内容
,再修改main.c吧
。。。。。。
int main(void)
{
。。。。。。
MX_USART1_UART_Init(UART_BANDRATE);
MX_USART3_UART_Init(UART_BANDRATE);
/* USER CODE BEGIN 2 */
while (1)
{
/* USER CODE END WHILE */
ProcessData(&huart1, UART1_TxBuff); //在串口输出数据测试所用
ProcessData(&huart3, UART3_TxBuff); //在串口输出数据测试所用
HAL_Delay(10);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
。。。。以上就是源码,想要最详细 的,去下载DEMO源码,让我赚点积分吧,嘻嘻!
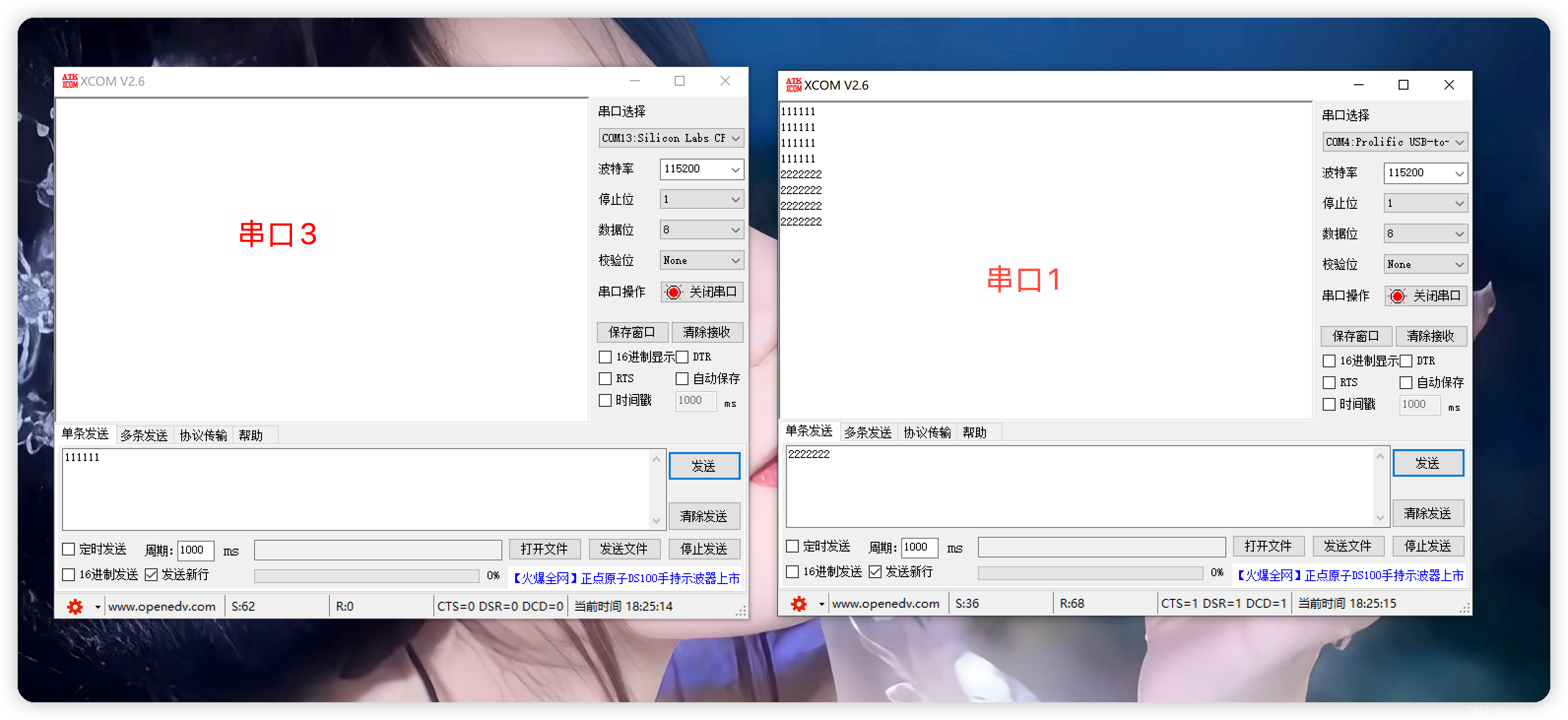
演示效果
串口3发送数据 串口1接收 串口1发送数据 串口1 接收
修改下面的代码
if(DEBUG_FLAG)
{
HAL_UART_Transmit_DMA(&huart1.uart, huart->TxOutPtr->start, huart->TxOutPtr->end - huart->TxOutPtr->start +1);
}
else
{
HAL_UART_Transmit_DMA(&huart->uart, huart->TxOutPtr->start, huart->TxOutPtr->end - huart->TxOutPtr->start +1);
}去掉判断 ,只保留下面的代码 :
HAL_UART_Transmit_DMA(&huart->uart, huart->TxOutPtr->start, huart->TxOutPtr->end - huart->TxOutPtr->start +1);然后运行的效果如下 :
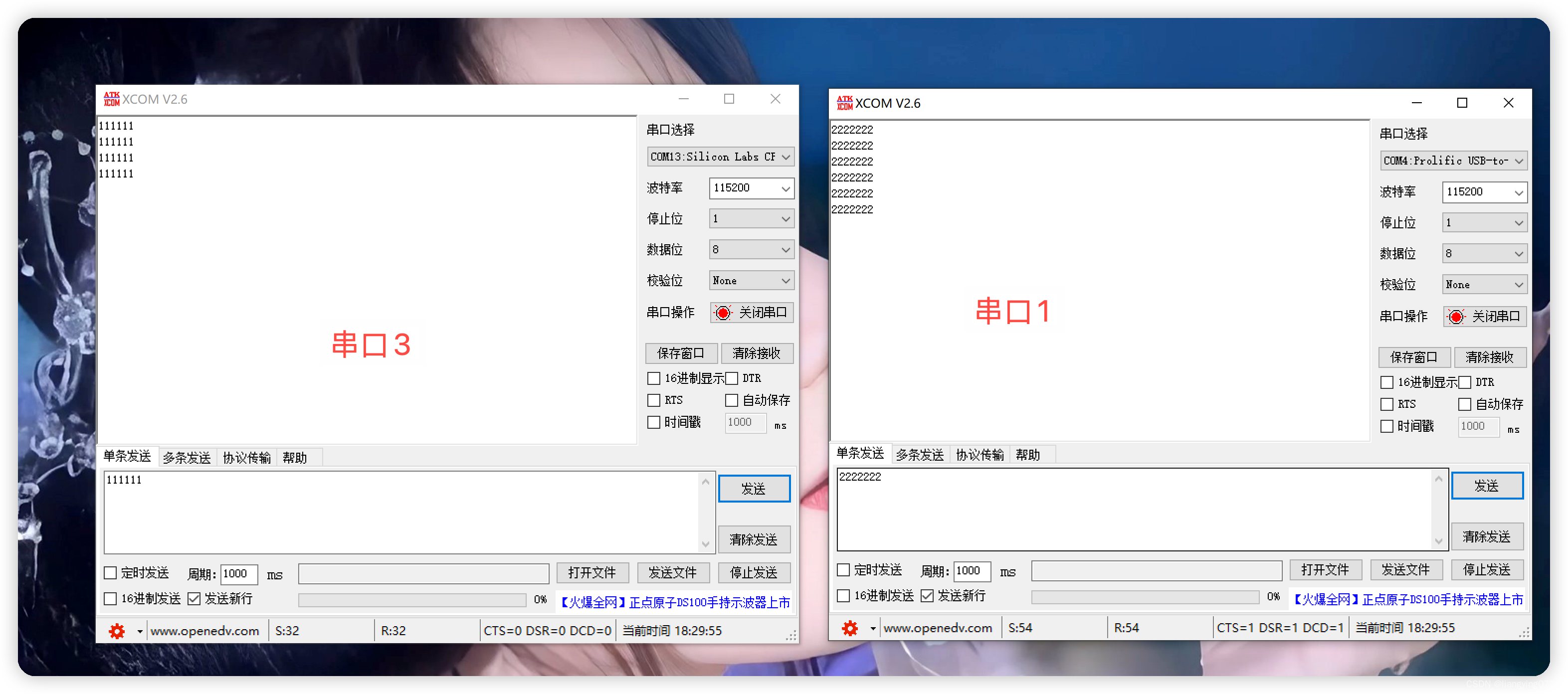
哦了,记录一下,省得忘记了
源码下载链接:















 4684
4684











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









