






 本文探讨4D毫米波雷达天线设计,包括阵列布局和设计要点。4D雷达提供方位和俯仰向信息,设计需考虑视场角、角分辨率等关键指标。文章介绍了几种阵列布局方案,如均匀面阵、数字波束形成技术,并讨论了天线设计的带宽、增益、波束宽度等因素。同时,贴片天线的设计细节如介电常数和焊盘拐角钝化对性能至关重要。
本文探讨4D毫米波雷达天线设计,包括阵列布局和设计要点。4D雷达提供方位和俯仰向信息,设计需考虑视场角、角分辨率等关键指标。文章介绍了几种阵列布局方案,如均匀面阵、数字波束形成技术,并讨论了天线设计的带宽、增益、波束宽度等因素。同时,贴片天线的设计细节如介电常数和焊盘拐角钝化对性能至关重要。
本篇主要讨论4D雷达天线阵列设计。4D毫米波雷达天线并不是说这个天线有4个维度,而是从目标特性的角度讲,被探测的目标有物理空间3个维度+频谱1个维度的特性。
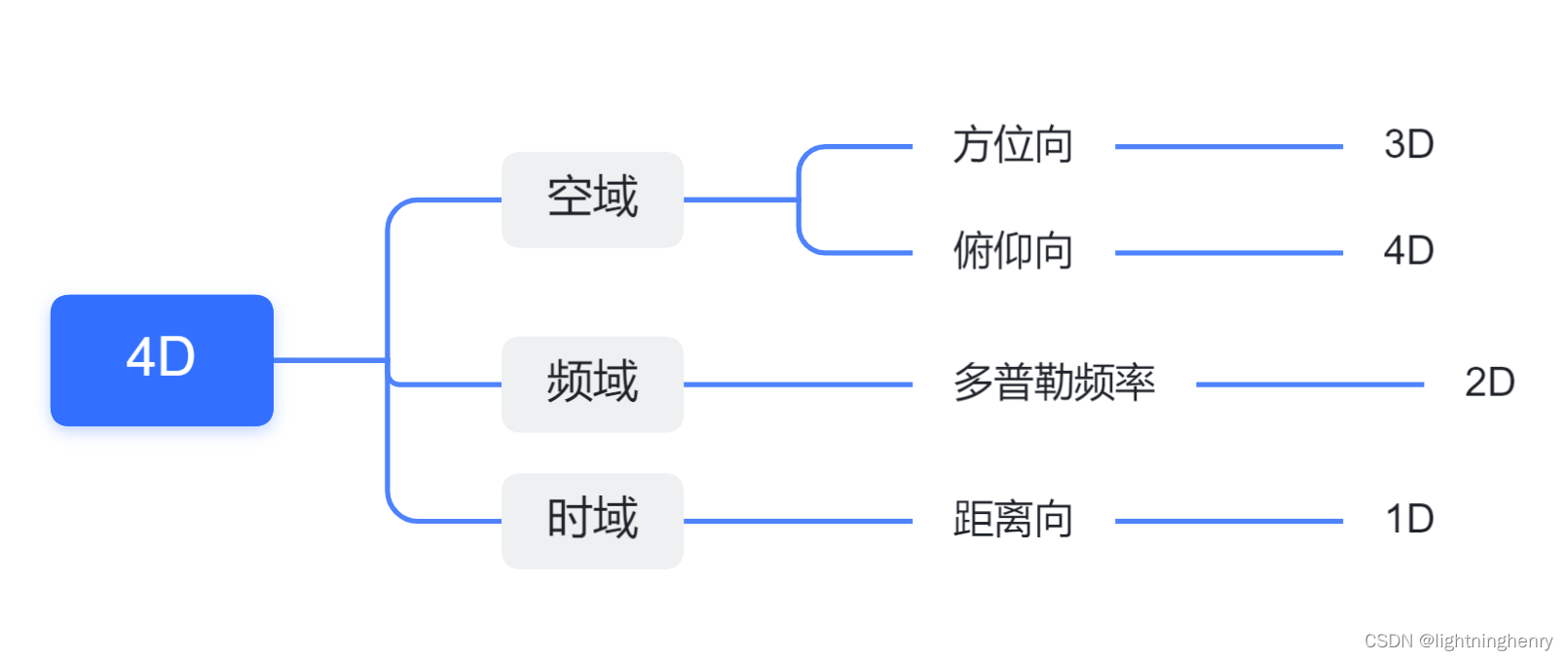
而与天线设计有关的是方位向和俯仰向,以前的3D车载雷达是没有俯仰向的,所以4D比3D多的是俯仰向的信息。
车载毫米波雷达天线阵列指标包括:
- 天线视场角FoV
- 角分辨率
- 测角不模糊范围
- 测角精度
- 测角稳健性
这些指标相互制约,而且指标实际效果与波形、DOA算法、硬件设计、制造工艺相关。不同的应用需求,设计要求会有略微差异。因此,天线设计追求的是最合适最合理,而不是最完美。
1 阵列布局
基于车载毫米波雷达的3D-FFT处理,那么在俯仰维我们很容易联想到4D-FFT,那么利用MIMO雷达虚拟孔径技术的生成VAA(Virtual Antenna Array)也必须是均匀的面阵,于是就有了如下两种收发阵列设计方案(Jan Mietzner等提出)。
方案1:

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 693
693

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











