







目录:
一、向量与线性组合
1、向量
1)什么是向量 2)向量的分类 3)向量加法 4)向量的乘法 5)零向量
2、线性组合
二、向量的模与点积
1、向量的点积
2、向量的模
3、单位向量
三、初识矩阵
1、矩阵相关
2、矩阵与线性方程组
3、逆矩阵
4、左乘与奇异矩阵
四、消元
1、方程组的行图像与列图像
2、消元思想
3、消元法求解方程
1)消元法介绍 2)回带求解
4、消元矩阵
1)行向量与矩阵的乘法 2)消元矩阵介绍 3)行交换矩阵与逆矩阵
附录
1、矢量/向量/相量
下续:数学-线性代数2(矩阵乘法、逆矩阵、转置-转换-向量空间)
一、向量与线性组合
1、向量
1)什么是向量
指空间中具有一定长度及方向的直线段,有关矢量、向量与相量的区别请见附录。
比如向下图1 的向量V,它有两个成分:第一个成分是 4,第二个成分是 5。一方面可把它理解成二维平面中 x坐标为 4,y坐标为 5 的一个点,也可以理解为以平面原点 (0,0) 为起点,到目标终点 (4,5) 的有向线段。
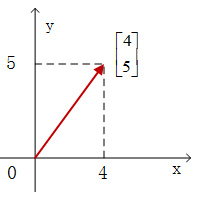
图1 二维空间中的点
表示三维空间中的一个点,或者在三维空间中以原点 (0,0,0) 为起点,到目标终点 (3,2,4) 的有向线段,如图2 所示。当然,以此类推还有更高维的向量。
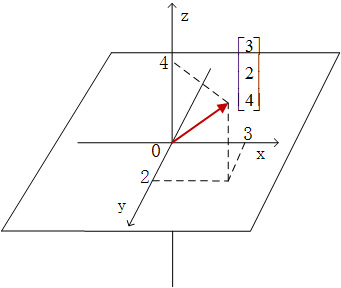
图2 三维空间中的点
2)向量的分类
向量分为行向量(Row Vector)和列向量(Column Vector)。
行向量的写法:v = [1 1]、v = [1 1 1]、....……(注意:中括号里面没有逗号)
列向量有两种写法:

或 v = (1,1)

3)向量加法

4)向量的乘法

则
c 被称为“标量”,通常是一个常数。可以这样理解标量乘法:c·V 相当于有 c个 V向量。
以上加法和标量乘法,同样适用于 n维向量。
5)零向量
零向量 0 并非 常数 0。可以这样理解,一个 n维的零向量,它含有 n个数值为 0 的数。
2、线性组合
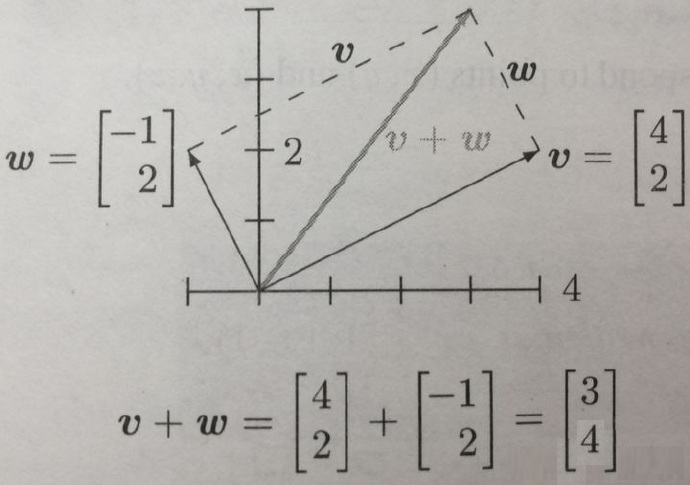
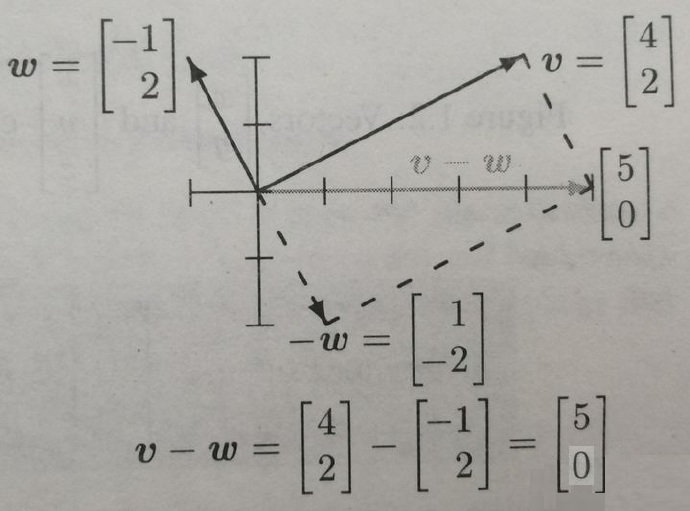
把 cv 和 dw 加起来,就得到一个线性组合(Linear Combination) cv+dw。有 4种特殊的线性组合,如下。
| 1 | 1v+1w | 和(Sum) |
| 2 | 1v-1w | 差(Difference) |
| 3 | 0v+0w | 零(Zero) |
| 4 | cv+0w | 最后得出一个标量乘法向量(A scalar multiple) |
“和”的图像:
“差”的图像:
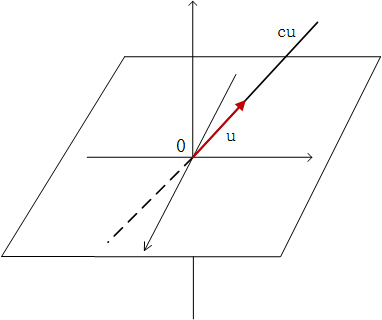
对于一个向量 u 来说,其唯一的线性组合为 cu;
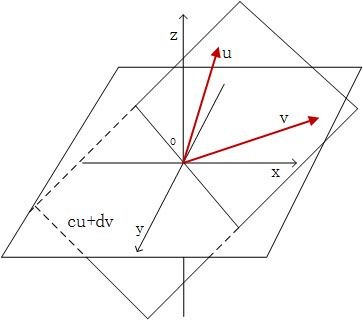
对于两个向量 u、v 来说,其线性组合为 cu+dv;
对于三个向量、四个向量,以此类推.......
那么这三个线性组合的图像分别是什么样子的?若三个向量都是非 0 向量,那么不难得出:
(1)线性组合 cu 填满了一条穿过 (0,0,0) 的线
(2)线性组合 cu+dv 填满了一个穿过 (0,0,0) 的平面
(3)线性组合 cu+dv+ew 填满了一个三维空间
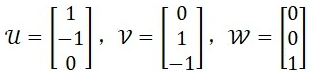
举例:向量 v = (1,1,0),向量 w = (0,1,1),求一个三维向量,使其不满足 v 与 w 所形成的线性组合。
解:在线性组合 cv+dw = (c, c+d, d) 中,第二个数等于第一、三个数之和。不满足这样的三维向量有无数个,如 (1,1,1)、(1,2,3)、.......

通过颜色混合理解线性组合与线性相关:https://live.csdn.net/v/422930。
二、向量的模与点积
1、向量的点积
向量 V = (v1,v2) 和向量 W = (w1,w2) 的点积(Dot Product),也称内积(Inner Product)或数量积(Scalar Product)。注意:v·w点积是一个数,不再是一个向量,点积的本质是向量空间的降维。

例:V = (1,3,-2),W = (-1,4,-3),则 V·W = -1+12+6 = 17。
关于点积的性质:
1)若两个向量的点积为 0,则这两个向量互相垂直(数学-向量的点乘与叉乘)。
2)满足乘法交换律:V·W = W·V,请别小看这一条性质。在线性代数里,并非所有的相乘都满足交换律(矩阵的乘法就不满足),学到后面千万不要搞混。
举例:
假设我们有三样商品待出售,或者想购买某三样商品。它们的单位价格分别为 (p1,p2,p3)→“价格向量”p。我们出售或购买的数量为 (q1,q2,q3)→“数量向量”q,出售时 q 为正,购买时 q 为负。当我们卖出 q1 数量、价格为 p1 的商品时,我们的收入为 q1·p1。
总收入:Income = (q1,q2,q3)·(p1,p2,p3) = q1p1+q2q2+q3p3 = 点积,当 q·p = 0 时,意味着收入 = 支出。
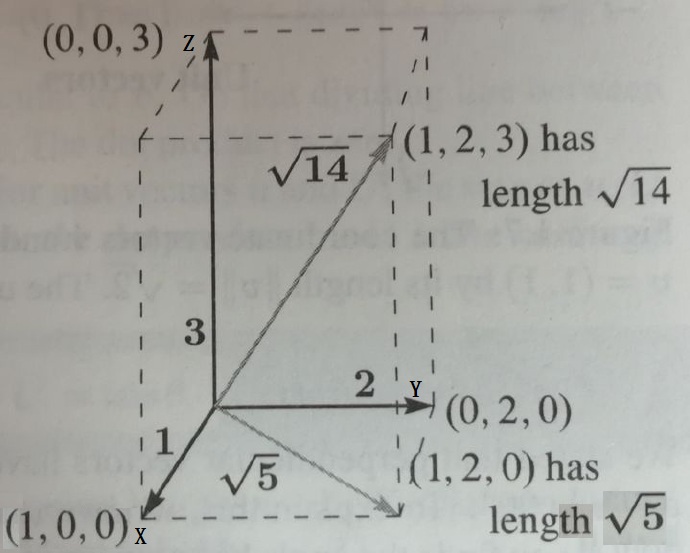
v = (1,2,3),其自身的点积为:

其中 ||V||² 称为模的平方。模的平方永远不等于 0,这是因为,对于两个相同的向量,它们不可能相互垂直。
2、向量的模
向量v 的模 (length),是 v·v 的平方根,记作 ||v || 模,本质上代表向量的长度。比如一个三维向量 v = (1,2,3),它的模为√14,也就是下面这个长方体(长为2、宽为1、高为3)的体对角线的长度。
3、单位向量
模长为 1 的向量,是单位向量 (unit vector),即 u·u = 1。例如,在四维向量中,u = (1/2,1/2,1/2,1/2)。
我们通常把在x轴的单位向量写作 i,把在 y轴的单位向量写作 j。
在 xy 平面坐标系中:
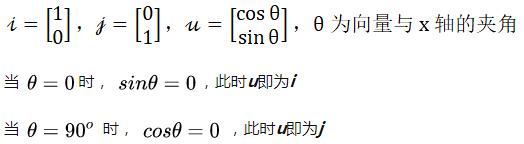
也就是说,若已知夹角,我们便可得知任何一个单位向量;倘若再得知向量的长度,便可得知任何一个向量。因此,便有下面一个公式:

注意:向量v 与单位向量u,二者方向相同。
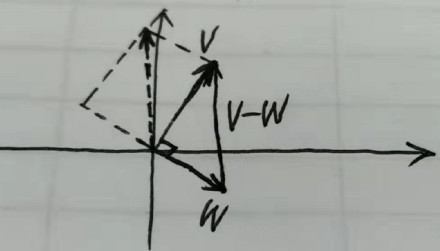
上面我们提到两个向量点积为 0 时,这两个向量互相垂直。如何证明该结论呢?
假设向量 v = (v1,v2) 与向量 w = (w1,w2) 互相垂直,则它们与向量 v-w = (v1-w1,v2-w2) 构成一个直角三角形。根据勾股定理:
![]()
可得:
![]()
化简,得
![]()
即 v·w = 0。
点积反映了向量间夹角的情况,一个重要的结论:
当 v·w > 0,夹角 <90°
当 v·w < 0,夹角 >90°
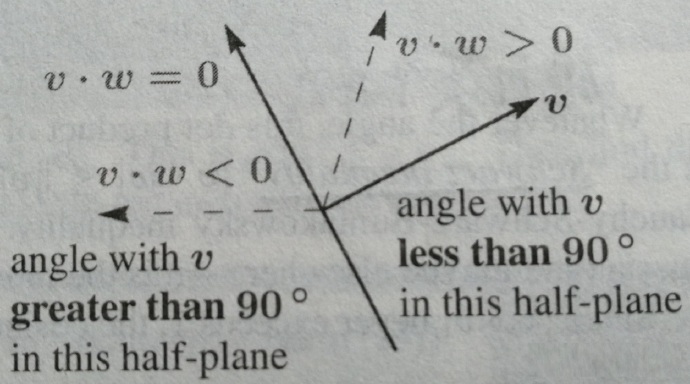
点积反映了向量间夹角的情况
另一个重要的结论:两个单位向量的点积的值 = 夹角的余弦。
![]()
结合下面的图会更方便我们理解:
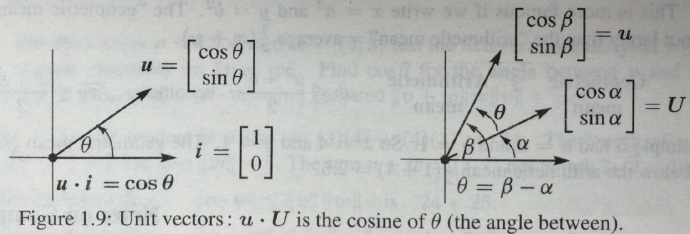
两个单位向量的点积的值 = 夹角的余弦
如果不是单位向量呢?任意两个普通的向量,其点积与它们之间的夹角有什么关系?
我们的思路:把普通向量变成单位向量!还记得刚才的那条公式 u = v/||v|| 吗?
对于两个非 0 向量 v、w,分别把它们变成单位向量 u、U:
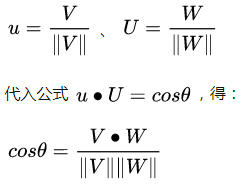
因为 V/||V|| 和 W/||W|| 都始终小于 1,则以上整个式子小于 1,分母大于分子,所以可得:

基本不等式的表述为:两个正实数的算术平均数 ≥ 它们的几何平均数,详见数学的精美之5、算数平均值≥几何平均值。
三、初识矩阵
1、矩阵相关
它们在三维空间里的线性组合为 x1U+x2V+x3W,也就是:
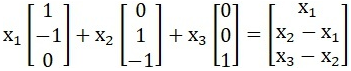
图3.1.1 式子(1)
注意注意!现在,开始我们的骚操作:
第一步:将三个向量作为矩阵的三列;
第二步:让 x1、x2、x3 组成一个新的向量;
第三步:将矩阵与新向量相乘,得到 Ax。把 A·x 的结果设为向量 b = (b1,b2,b3)。
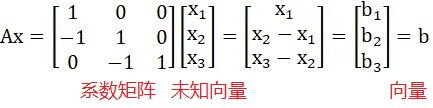
图3.1.2 式子(2)
系数矩阵(A):将方程系数按行提取出来,构成一个矩阵;
未知向量(x):将方程未知数提取出来,按列构成一个向量;
向量(b) :将等号右侧结果按列提取,构成一个向量。
这个 Ax 表示的含义,其实就等于上面的式子(1)。由于二者写法不同,我们理解的角度可以有所不同:
在式子(1)中,我们用数字 x1、x2、x3 分别去乘上三个向量;
而在Ax中,是矩阵与向量相乘(将矩阵A 作用于向量 x),得到一个新向量 b。
为何相乘结果是一个向量呢?怎样从几何的角度理解 Ax 呢?
从几何的角度看,矩阵A 代表一种线性变换,相乘则代表:向量x 通过这个线性变换 A,从向量x 变到了向量b。
(线性变换在后面的章节会详细讲到,现在姑且可以把它理解成像函数那样的东西,y = Ax,输入一个数 x,得到结果 y)。
怎么计算 Ax 呢?有两种计算方法,它们的计算结果都一样。
方法一(“列计算法”):
刚才我们是从式子(1) 推出式子(2) Ax = b 的,其实式子(1) 就是第一种算法:把向量x = (x1、x2、x3) 中的每一个元素,分别与矩阵的列相乘。

比如:
![]()
方法二(“行计算法”):

向量x 分别与矩阵的行相乘(教材中一般用此法)
比如:
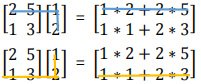
即:

2、矩阵与线性方程组
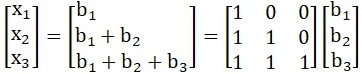
刚才在两个式子中,x1、x2、x3 都是已知的,而结果 b 未知。现在反过来,已知 b = (b1、b2、b3),求向量x = (x1、x2、x3)。拿式子(2) 为例,很容易得到:
解得:
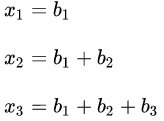
好简单,其实就是解方程组,中学时期已经学过了。可是书上就是叫“线性方程组”。值得注意的是:在这个例子中,当 b = 0 时,求得 x = 0。
可以确定一定以及肯定地说,对于矩阵
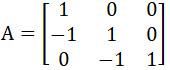
式子 Ax = b 中,若输入 0,则输出为 0。但不是所有的矩阵都满足。
3、逆矩阵
已知 x 时,b = Ax;
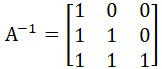
已知 b 时,x = A^(-)b;
其中, A 与 A^(-) 互为逆矩阵。
把刚才方程的解,写成矩阵的形式:
可以看出
我们可以把矩阵和其逆矩阵的关系,类比成导数与积分的关系。

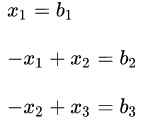
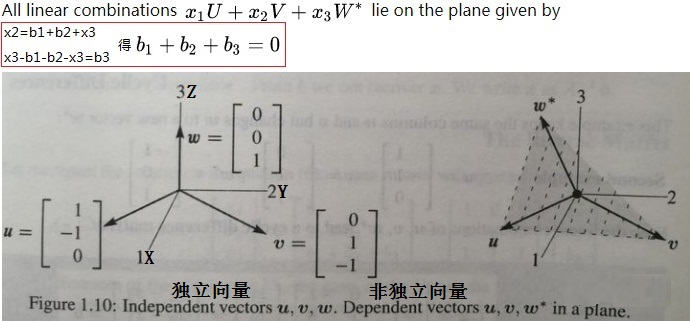
并非所有矩阵都可逆。看下面这个例子:(和刚开始的 w 不同)
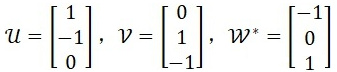
写成矩阵的形式:

在这个等式中,无论是已知向量x还是向量b,都很难求出另一个向量,因为其线性方程组无解(或当 b = 0 时,x 有无数解)。因此,矩阵C 不可逆。书上称矩阵C 为“循环差矩阵” (Cyclic Difference Matrix)。
从几何的角度来看,u、v、w都在一个平面上,其所有的线性组合也在一个平面上。
4、左乘与奇异矩阵
1)左乘
设 A 为 m*p 的矩阵,B 为 p*n 的矩阵,那么称 m*n 的矩阵C 为矩阵A 与 B 的乘积,记作 C = AB,称为 A 左乘 B,或B被A左乘。
2)奇异矩阵
对一个 n行 n列的非零矩阵 A,如果存在一个矩阵B 使 AB = BA = I(I是单位矩阵),则称 A 是可逆的,也称 A 为非奇异矩阵。
非奇异矩阵的判定方法:
(1)其行列式不为零。
(2)其线性变换是个自同构。
(3)其秩为n。 (R(A))
可逆矩阵就是非奇异矩阵,非奇异矩阵也是可逆矩阵。
四、消元
1、方程组的行图像与列图像
设一个方程组为
x-2y = 1
3x+2y = 11
行图像:
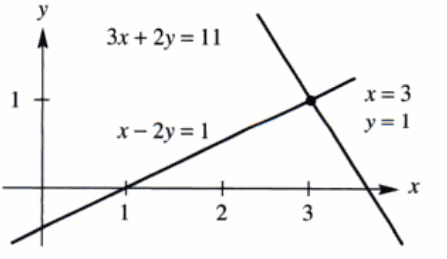
每一个方程都用一条线表示,交点则为方程组的解
列图像(取 x 与 y 的列得向量):
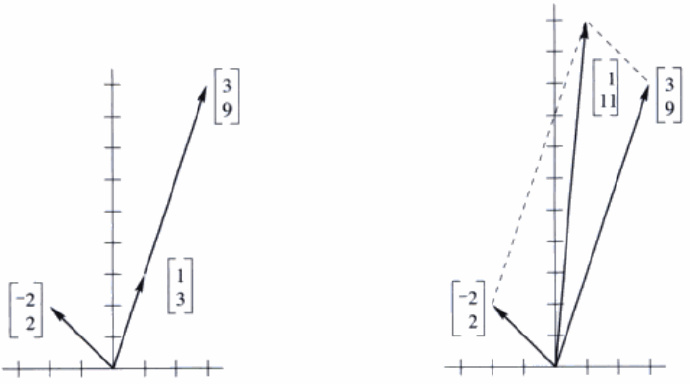
把方程组中 x 和 y 的系数提出来,与等式右边的值分别看成三个列向量。整个方程组可以看成一个线性组合,x 和 y 的值则是方程组的解。
![]()
上式中 x = 3、y = 1。回到列图像中,当有 3 个向量(1,3)和 1 个向量(-2,2)相加,所形成的正好是向量(1,11),所以解为 x = 3、y = 1。
以上是用图像去理解方程组的两种角度,想必很多人对第一种比较熟悉,毕竟我们中学以来学的都是行图像。对于 1个平面或者 3维空间的行图像比较直观,但 n维空间就会非常困难,故引入线性代数(列图像)。但相比之下,列图像更方便我们去理解高维度的方程组。举个例子,就四维来说:
行图像:显示四个不平行的平面如何在一个点相遇(2个平面相交于一条线,3个及以上平面相交于一点);
列图像:在四维空间中,显示四个向量的组合。显然,列图像更容易操作并可视化。
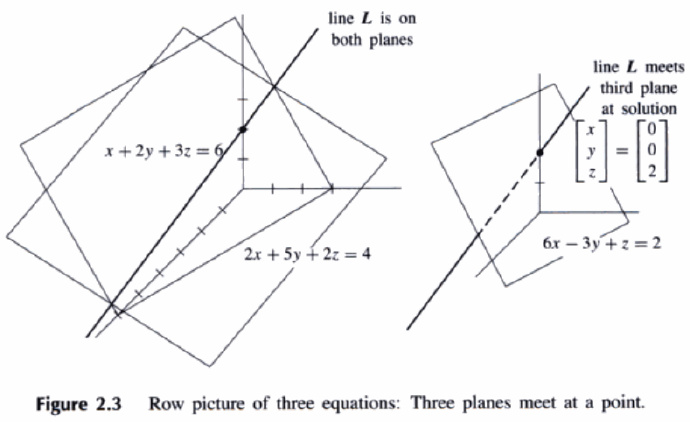
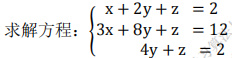
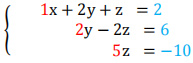
设三元一次方程组:
x+2y+3z = 6
2x+5y+2z = 4
6x- 3y+ z = 2
行图像显示:在 1个三维空间中,3个平面交于一点(解为此点);
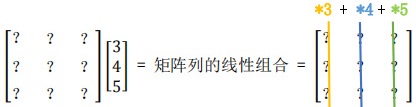
列图像显示:3个三维向量相加,得出一个三维向量(解为此向量)。
行图像:
列图像:

3个三维向量相加,得出一个三维向量
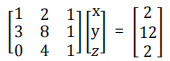
在刚才那个三元一次方程组中,把未知数的系数全部提出来,组成系数矩阵A
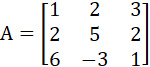
若再加上未知数和方程右值,可得以下等式(Matrix equation):
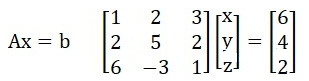
这里 Ax 表示矩阵A 与向量x 相乘。那它们是怎么乘的呢?有两种角度:按(矩阵的)行乘、按(矩阵的)列乘。
若按行乘:
矩阵的第n行,分别与向量的第n个元素相乘。
若按列乘:
Ax = x(col1)+y(col2)+z(col3)
即矩阵的第n列,分别与向量的第n个元素相乘。
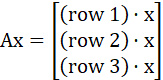
2、消元思想
消元前:
x-2y = 1..............................方程一
3x+2y = 11........................方程二
将方程一乘 3,得到方程三 3x-6y = 3,再用方程二减去方程三,得 8y = 8
消元后:
x-2y = 1
8y = 8
所以线性方程组的解为 (x,y) = (3,1)
以下为消元前后的图像:
消元法行不通的两种情况:
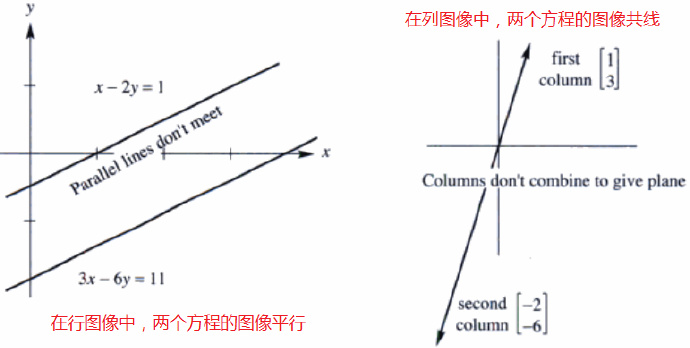
情况一(无解):
拿下面这个方程为例,
消元前:
x-2y = 1
3x-6y = 11
消元后:
x-2y = 1
0y = 8
主元书上的定义是参与消元的方程式中的第一个非 0 数。注意:消元法中,主元不能为 0。
刚举例的这个方程中,消元后的 0y = 8,出现了主元为 0 的情况,因此消元法行不通,方程无解。
让我们来看看这个方程组的行图像和列图像:
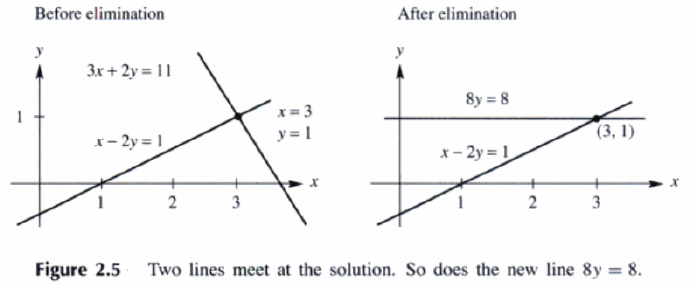
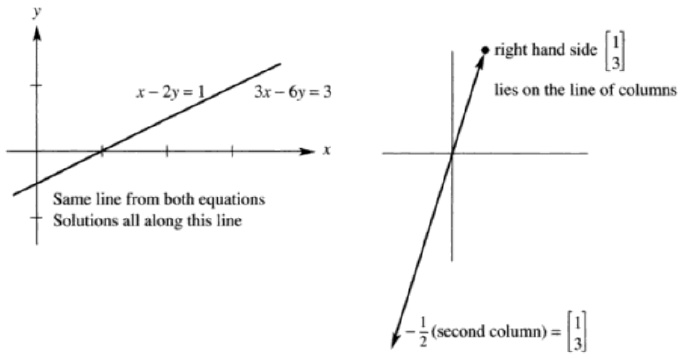
消元法行不通的第二种情况(太多解):
拿下面这个方程为例,
消元前:
x-2y = 1
3x-6y = 3
消元后:
x-2y = 1
0y = 0
每一个y都满足方程 0y = 0,这种情况也行不通。
让我们来看看这个方程组的行图像和列图像:
看到这里不知你是否也有一个疑惑:这两种情况行不通,明明是因为方程本身无解啊.......
其实我觉得吧,fail 的原因不是消元法的锅,而是方程组是一个 "bad equation",它本身无解。
以上消元的思想,可以延续在三元一次方程组、四元......
本节重点:
(1)主元不能为 0。若主元为 0,可适当调换。(exchange rows if there's a nonzero below it);
(2)消元法 fail 的两种情况。
3、消元法求解方程
1)消元法介绍
对于一些“好”的系数矩阵(可逆矩阵)A 来说,我们可以使用消元法来求解方程 Ax = b,我们还是从一个例子谈起。
还是使用矩阵运算,将方程写为矩阵形式 Ax = b。
所谓矩阵的消元法,与我们初等数学中学习的解二元一次方程组的消元法其实师出同门,都是通过将不同行的方程进行消元运算来简化方程,最后能得到简化的方程组,只不过这里我们把系数单独抽出来进行运算,寻找一种矩阵情况下的普遍规律而已。
消元针对的对象是系数矩阵
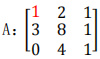
首先注意,左上角的 1 是消元法的关键,我们称之为主元 1,接下来通过我们熟悉的“将一行乘倍数加到另一行”(即第二行减去第一行)的行化简方法将第一列中除了主元之外的元素全变为 0。
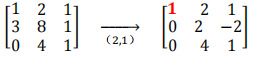
第一步目标达成,我们在第一列中只留下了主元 1,很好,接下来我们可以认为第一行与第一列已经“完工”了,再看去掉第一行第一列之后右下角剩下的部分:

同样,我们将左上角的 2 视为主元,消元第一列,使其列上(不包括第一行中元素)除此主元 2 之外皆为 0。
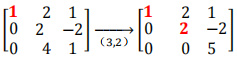
这时候第三行只剩下 5,我们直接将其处理为主元即可。得到:

由于 A 矩阵可逆,经过消元处理得到的上三角矩阵
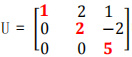
中有三个主元,至此,消元结束,得到的 U 即为我们想要化简的形式。
注:并不是所有的 A 矩阵都可消元处理,需要注意在我们消元过程中,如果主元位置(左上角)为 0,那么意味着这个主元不可取,需要进行 “换行”处理,首先看它的下一行对应位置是不是 0,如果不是,就将这两行位置互换,将非零数视为主元。
如是,就再看下行,以此类推。若其下面每一行都看到了,仍然没有非零数的话,那就意味着这个矩阵不可逆,消元法求出的解不唯一。下面是三个例子

2)回带求解
其实回带求解应该和消元法同时进行,只不过本课中以及一些软件工作原理中它们是先后进行的,所以我们这里分开讨论,先介绍增广矩阵:
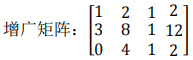
一下子就看出来了,就是把系数矩阵A 和向量b 拼接成一个矩阵就行了。 然后像我们之前说的那样消元,但是这次要带着增广的 b(蓝色部分)一起进行:

好,带回方程 Ax = b,变为:
从下向上开始求解,很容易求出 x、y、z 的值了。
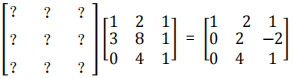
4、消元矩阵
1)行向量与矩阵的乘法
上面的消元法是从简单的变换角度介绍了消元的具体操作,接下来我们需要用矩阵来表示变换的步骤,这也十分有必要,因为这是一种“系统地”变换矩阵的方法。
首先我们需要介绍向量与矩阵之间的乘法,上一节中我们提到了矩阵与列向量之间的乘法,例如:

上述乘法相当于对矩阵A 中的列向量做线性组合,线性组合的系数就是向量x 中的每个对应位置的元素。
这并不能解决我们现在的问题,因为消元法之中我们用到的是行变换,那么我们考虑这个问题,行向量与矩阵的乘积是什么呢?


用向量左乘矩阵A,相当于对矩阵A中的行向量做线性组合,线性组合的系数就是向量x 中的每个对应位置的元素。
至于行向量与矩阵之间乘法为什么变为左乘,是因为此时,行向量是 1*3 的,矩阵是 3*3 的 , 故可以得到一个 1*3 的结果 。 如果在右面的话,
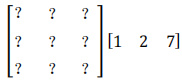
这是个 3*3 矩阵乘上一个 1*3 矩阵,其中衔接部位 1 ≠ 3,导致错误,即交换律在这里不能成立。其实学过矩阵之间的乘法之后这些东西都极为简单,但这里还是建议大家尽量从向量的角度去考虑问题。
2)消元矩阵介绍
接下来是重点。学会了行向量与矩阵之间的乘法,我们就可以使用行向量对矩阵的行做操作了。所谓消元矩阵,就是将消元过程中的行变换转化为矩阵之间的乘法形式。首先我们要知道,
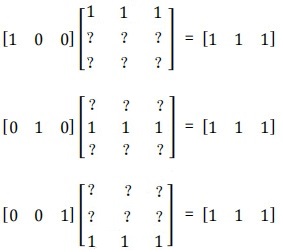
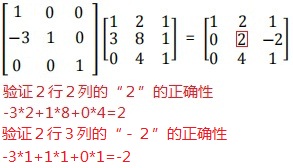
我们很容易验证,这样的单位矩阵与矩阵相乘不改变矩阵。消元矩阵就是它的变换形式。仍是以例一中的矩阵说明:
首先明确:

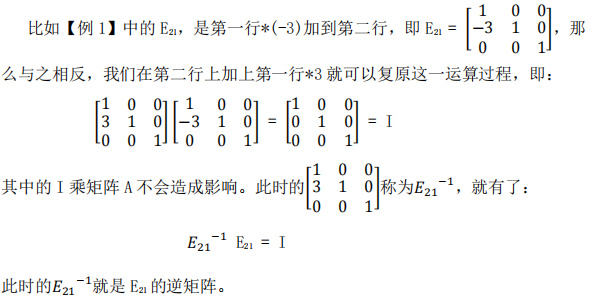
我们消元过程是将第一行乘 -3 加到第二行,这是对第二行的操作,那么就从单位矩阵得到第二行着手:
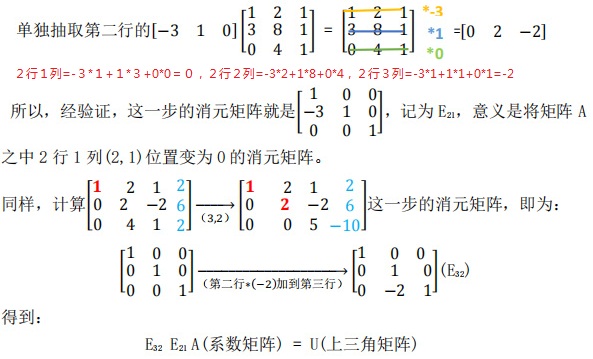
使用结合律,先计算 E32、E21,记为 E,则 E 就是整个此消元过程的消元矩阵。
核心:求消元矩阵就是从单位矩阵 I 入手,按照 A 每次变换的消元步骤操作 I 矩阵,能分别得到 E 某行某列,最后累积得到 E 即可。
3)行交换矩阵与逆矩阵
(1)行变换与列变换
有了上面消元矩阵的启发,不难得到,能够交换 2x2 矩阵中两行的矩阵为:
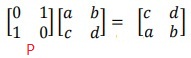
而交换 2x2 矩阵中两列的矩阵为:
所以,左乘等同行变换,右乘等同列变换。其中的 P 称为置换矩阵。
(2)逆矩阵初探
可以说我们学会了消元矩阵,就相当于我们可以用矩阵乘法对一个矩阵进行任何变化了,那么我们考虑一个反过程,即我们把一个消元结束的矩阵U 如何变为未经消元的矩阵A 呢?答案就是乘上一个逆矩阵。
附录
1、矢量/向量/相量
| 名称 | 概念不同 | 用法不同 | 意义不同 |
| 矢量 | 既有大小又有方向的物理量,在物理学中常用来表示速度、加速度、力等。在数学中,矢量被抽象为向量,具有大小(长度)和方向,可以用箭头表示。 | 在物理学中,矢量的运算遵循平行四边形法则,即两个矢量的合成等于它们的向量加法,而矢量的相反则表示方向相反。 | 矢量在物理学中具有重要意义,它们是描述物体运动和力的基本工具。矢量的概念有助于我们理解物体的动态行为和相互作用。 |
| 向量 | 即欧几里得向量或几何向量,是数学中的一种基本概念,指具有大小和方向的量。在几何学中,向量通常用带箭头的线段来表示,箭头指向代表方向,线段长度代表大小。 | 向量在数学中用于表示和计算几何形状的属性,如面积和体积。向量的加法和减法遵循平行四边形法则,而向量的数乘则改变了向量的大小而不改变方向。 | 向量在数学和物理学中都非常重要,它们不仅用于描述几何形状和物理量,还是线性代数的基础,向量的运算构成了许多数学理论的基础。 |
| 相量 | 用来表示正弦波形的大小和相位,通过复数的形式来表示,其中复数的模代表大小,辐角代表相位。 | 相量在电子工程中用于分析和设计交流电路。 | 相量是电子工程学中的一个专业术语,它使得工程师能够简化交流电路的分析,特别是在处理复杂的正弦波形时,相量法提供了一种直观且有效的分析工具。 |
临渊羡鱼,不如退而识网。觉得不错,动动发财的小手点个赞哦!



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











