







本文系转载,原文出处:http://blog.csdn.net/zwlq1314521/article/details/45038271
OpenCV 如何对图像的像素进行操作
对图像的像素进行操作,我们可以实现空间增强,反色,大部分图像特效系列都是基于像素操作等目的。先来看一下内存空间中图像矩阵,也就是Mat的矩阵数值部分是怎么存储的:
如果图像是一幅灰度图像,他就像这样,从左到右,从上到下,依次是矩阵的每一行每一列,这时候矩阵M(i,j)的值自然就是当前点的灰度值了。
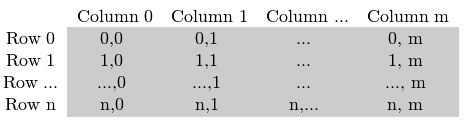
而对于一幅彩色图像,由于它的像素分量channel并不是一个,所以每一列又分为了几个channel。拿常见的RGB图像来说,就像这样:

从这张图上,就可以比较清楚地看出来在内存中矩阵是如何存储多channel图像的了。这里要注意的是在RGB模型中,每一个子列依次为BGR,也就是正好是颠倒的,第一个分量是蓝色,第二个是绿色,第三个是红色。
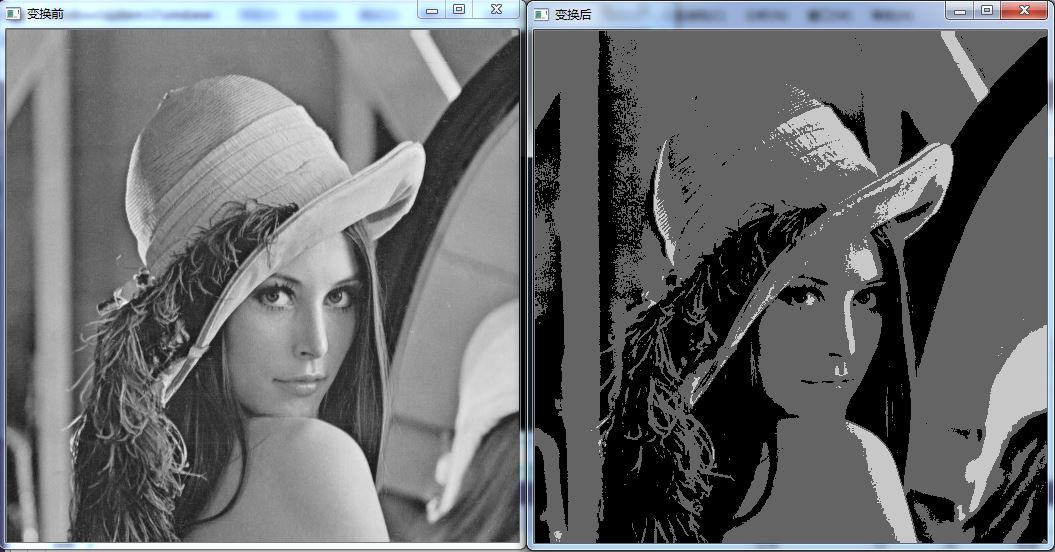
清楚了图像在内存中的存储方式,我们也就可以来进行像素值的操作了。在这里,我们举这样一个例子。我们对一幅灰度图像的灰度值进行变换:
小于100的灰度值被统一映射为0;100到200之间的灰度值被映射为100;大于200的灰度值被映射为200.
主函数如下:
- int main()
- {
- string picName="lena.jpg";
- Mat A=imread (picName,CV_LOAD_IMAGE_GRAYSCALE); //读入灰度图像
- uchar table[256]; //映射表,规定了变换前后灰度值的对应关系 table[gray_value_before]=gray_value_after
- for (int i=0;i<256;i++)
- {
- table[i]=i/100*100; //这里利用了C++的语言特性i/100只会留下整数部分
- }
- imshow("变换前",A);
- Mat B=ChangeImg (A,table); //变换函数
- imshow ("变换后",B);
- waitKey ();
- return 0;
- }
首先,我们用指针方式对图像的像素点灰度值进行操作:
- Mat ChangeImg(Mat &img,const uchar* table)
- {
- CV_Assert(img.depth ()!=sizeof(uchar)); //声明只对深度8bit的图像操作
- int channels=img.channels (); //获取图像channel
- int nrows=img.rows; //矩阵的行数
- int ncols=img.cols*channels; //矩阵的总列数=列数*channel分量数
- if (img.isContinuous ()) //判断矩阵是否连续,若连续,我们相当于只需要遍历一个一维数组
- {
- ncols*=nrows;
- nrows=1; //一维数组
- }
- //遍历像素点灰度值
- for (int i=0;i<nrows;i++)
- {
- uchar *p=img.ptr<uchar>(i); //获取行地址
- for (int j=0;j<ncols;j++)
- {
- p[j]=table[p[j]]; //修改灰度值
- }
- }
- return img;
- }
这里,我们获取了每一行开始处的指针,然后遍历至该行末尾。如果矩阵是以连续方式存储的,我们只需请求一次指针、然后一路遍历下去就行。彩色图像的情况有必要加以注意:因为三个通道的原因,我们需要遍历的元素数目也是3倍。
或者,我们可以使用data。data会从Mat中返回指向矩阵第一行第一列的指针。注意如果该指针为NULL则表明对象里面无输入,所以这是一种简单的检查图像是否被成功读入的方法。当矩阵是连续存储时,我们就可以通过遍历 data 来扫描整个图像。例如,一个灰度图像,其操作如下:
- uchar* p = img.data;
- for( unsigned int i =0; i < ncol*nrows; ++i)
- *p++ = table[*p];
或者,更安全的方法,我们可以使用迭代器。在迭代法中,所需要做的仅仅是获得图像矩阵的begin和end,然后增加迭代直至从begin到end。将*操作符添加在迭代指针前,即可访问当前指向的内容。
- Mat& ScanImageAndReduceIterator(Mat& I, const uchar* const table)
- {
- // accept only char type matrices
- CV_Assert(I.depth() != sizeof(uchar));
- const int channels = I.channels();
- switch(channels)
- {
- case 1:
- {
- MatIterator_<uchar> it, end;
- for( it = I.begin<uchar>(), end = I.end<uchar>(); it != end; ++it)
- *it = table[*it];
- break;
- }
- case 3:
- {
- MatIterator_<Vec3b> it, end;
- for( it = I.begin<Vec3b>(), end = I.end<Vec3b>(); it != end; ++it)
- {
- (*it)[0] = table[(*it)[0]];
- (*it)[1] = table[(*it)[1]];
- (*it)[2] = table[(*it)[2]];
- }
- }
- }
- return I;
- }
注意,在这里对3通道的图像进行操作的时候,使用到了Vec3b。Vec3b作为一个对三元向量的数据结构,用在这里正好是能够表示RGB的三个分量。如果对于彩色图像,仍然用uchar的话,则只能获得3通道中的B分量。比如我们可以这样打印出图像的RGB三个分量:
- for (int i=0;i<img.rows;i++)
- {
- const Vec3b* Mpoint=img.ptr <Vec3b>(i);
- for (int j=0;j<img.cols;j++)
- {
- Vec3b intensity=*(Mpoint+j);
- cout<<"R:"<<int(intensity[2])<<" G"<<int(intensity[1])<<" B"<<int(intensity[0])<<" ";
- }
- cout<<endl;
- }
这里使用指针,当然也可以使用上面的迭代器。
然而,OpenCV里面已经有了相应函数可以让我们更加方便地对像素进行操作,那便是LUT函数,而且推荐使用OpenCV的内建函数,因为已经针对芯片做了优化设计,使得速度有很大提升。
函数原型为:void LUT(InputArray src, InputArray lut, OutputArray dst, int interpolation=0 )
实现的映射关系如下所示:
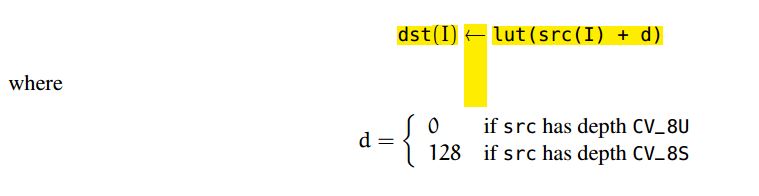
也就是说比如原来src中值为1会映射为table[1]所对应的值再加上d。
所以上面的操作,我们其实只需要使用LUT函数就可以了。结合我们自己设计的table表,就能够实现对图像的操作。
- int main()
- {
- string picName="lena.jpg";
- Mat A=imread (picName,CV_LOAD_IMAGE_GRAYSCALE); //读入灰度图像
- Mat lookUpLut(1,256,CV_8UC1); //建立一个256个元素的映射表
- imshow ("变换前",A);
- for (int i=0;i<256;i++)
- {
- lookUpLut.at<uchar>(i)=i/100*100;
- }
- Mat B;
- LUT (A,lookUpLut,B);
- imshow ("变换后",B);
- waitKey ();
- return 0;
- }
下面的图就是效果啦~~~
参考 http://www.xuebuyuan.com/1730735.html
补充:我们得出一些结论: 尽量使用 OpenCV 内置函数. 调用LUT 函数可以获得最快的速度. 这是因为OpenCV库可以通过英特尔线程架构启用多线程,下面的opencv矩阵操作均是优化的多线程并行处理,较高效
(复制不过来,直接参看原文连接吧)
| OpenCV - Operations on Arrays 对数组(矩阵)的一些操作 | |
| Function (函数名) | Use (函数用处) |
| Author : Ggicci QQ : 771017478 / 854032390(prefer) 转载请注明出处! | |















 1308
1308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









