






485转232
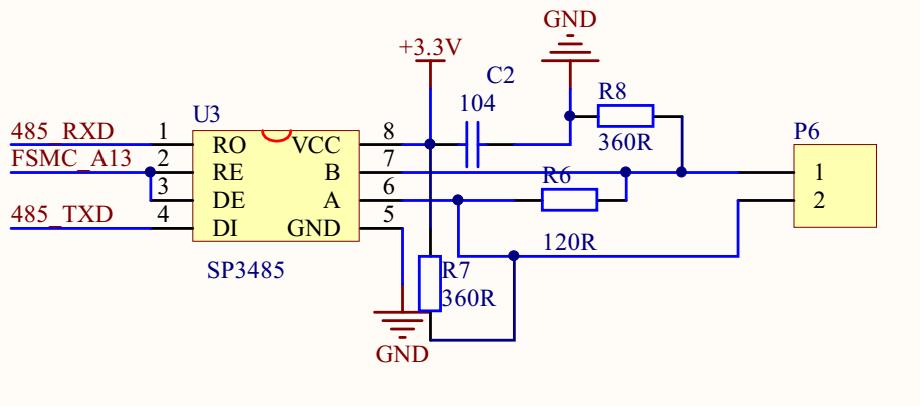
SP3485的管脚及功能:
Pin1.RO 接收器输出
Pin2.RE 接收器输出使能(低电平有效)
Pin3.DE 驱动器输出使能(高电平有效)
Pin4.DI 驱动器输入
Pin5.GND 地
Pin6.A 驱动器输出/接收器输入(同相) A接A
Pin7.B 驱动器输出/接收器输入(方相) B接B
Pin.VCC 电源
SP3485的RO,DI分别连单片机的串口的RXD,TXD。
DE和RE连接起来,然后引出一根线去连接单片机的IO。控制RS485是接收信息,还是发送信息。
485传输在接收使能和发送使能之间需要加一个2ms的延时。确保状态转换完成。
项目相关知识点
无刷电机的驱动方法:
单向: 50hz的PWM控制
1ms-2ms的PWM范围
1ms为电机停止转动信号,2ms为电机满速信号
通过调节占空比来控制电机的转速
双向: 50hz的PWM控制
1ms-2ms的PWM范围
1.5ms为电机停止转动信号,2ms为电机某一方向满速信号,1ms为电机另一方向满速信号
通过调节占空比来控制电机的转速
关于串口摄像头:
摄像头的串口线只能从电脑上的USB口接入,不能从集线器上的USB口介入(造成的原因还有待查明)
关于串口
串口发送结束以后需要指令
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)!=SET);
作用是等待发送结束
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)!=SET);
作用是等待发送结束
最后来几张实测图片


如有不足之处或者是更好的处理建议,请与作者联系。QQ:945116700 邮箱 :duo_lin0119@163.com
谢谢各位的阅读。
















 175
175

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











