







 本文讲述了作者在GD32F303开发板上移植FreeRTOS并集成FreeRTOS-Plus-CLI的过程,包括串口通信、中断处理、任务设计以及自定义echo命令的实现,展示了国产单片机在嵌入式开发中的应用和优化策略。
本文讲述了作者在GD32F303开发板上移植FreeRTOS并集成FreeRTOS-Plus-CLI的过程,包括串口通信、中断处理、任务设计以及自定义echo命令的实现,展示了国产单片机在嵌入式开发中的应用和优化策略。
背景
之前我只在STM32F0上基于HAL库和CubeMX移植FreeRTOS,但最近发现国产化替代热潮正盛,许多项目都有国产化器件指标,而且国产单片机确实比意法的便宜,所以也买了块兆易创新的GD32F303开发板,试一试它的优劣。虽然GD32F系列基本都可以和同名的ST单片机pin-to-pin替换,程序也通用,但GD自己也开发了一套库函数,基于GD的库函数开发有利于熟悉GD设计的逻辑,对于未来学习GD的RISC-V单片机也有帮助。另外,不用ST的HAL库,也能降低代码量。
FreeRTOS我们已经很熟悉了,官方又提供了FreeRTOS-Plus库,简化应用的开发。其中FreeRTOS-Plus-CLI,即 command line interpreter,命令行翻译器,可以为运行FreeRTOS的嵌入式设备提供一套命令接口,便于设备在线配置。移植FreeRTOS-Plus-CLI显然对改善嵌入式产品很有帮助。
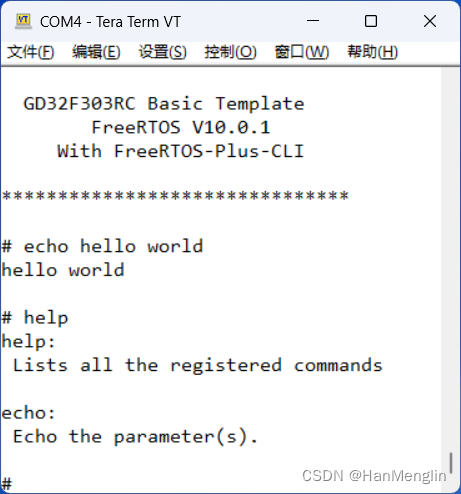
(串口运行输入和输出)
GD32串口输入输出和编译器配置
大多数开发板会引出USART0,的通信管脚以便ISP下载。为便于插线,我就直接用USART0进行数据的输入输出,其中输出无需中断,输入可以用中断给出信号量。在系统初始化时,我们应该避免用户输入,故把输入和输出的初始化分开成两个函数:
/*!
\brief uart_init function
\param[in] none
\param[out] none
\retval none
*/
void uart_init(void)
{
// enable GPIO and USART RCU clock
rcu_periph_clock_enable(USART0_RCU_PORT); // USART0_RCU_PORT define为串口所在的RCU_GPIOx
rcu_periph_clock_enable(RCU_USART0);
gpio_init(USART0_PORT,GPIO_MODE_AF_PP,GPIO_OSPEED_50MHZ,USART0_TX_PIN); // USART0_PORT define为串口管脚对应的GPIOx
gpio_init(USART0_PORT,GPIO_MODE_IN_FLOATING,GPIO_OSPEED_50MHZ,USART0_RX_PIN);
usart_deinit(USART0);
usart_baudrate_set(USART0,UASRT0_BAUDRATE);
usart_word_length_set(USART0,USART_WL_8BIT);
usart_stop_bit_set(USART0,USART_STB_1BIT);
usart_parity_config(USART0,USART_PM_NONE);
usart_hardware_flow_rts_config(USART0,USART_RTS_DISABLE);
usart_hardware_flow_cts_config(USART0,USART_CTS_DISABLE);
usart_transmit_config(USART0,USART_TRANSMIT_ENABLE);
usart_enable(USART0);
}
/*!
\brief uart_recv_init function
\param[in] none
\param[out] none
\retval none
*/
void uart_recv_init(void)
{
usart_disable(USART0);
usart_receive_config(USART0,USART_RECEIVE_ENABLE);
usart_enable(USART0);
nvic_irq_enable(USART0_IRQn, 15, 0);
usart_interrupt_enable(USART0, USART_INT_RBNE);
}
这里有关中断优先级的设置在后面再讲解,此处先按下。在GD官方的许多例程中,都通过重载fputc把标准库函数的输出定向到串口,在我们这里,就按如下定向到USART0:
/* retarget the C library printf function to the USART */
int fputc(int ch, FILE *f)
{
usart_data_transmit(USART0, (uint8_t)ch);
while(RESET == usart_flag_get(USART0, USART_FLAG_TBE));
return ch;
}
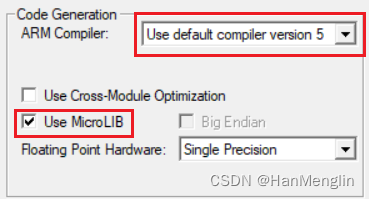
需要注意的是,标准库太大,直接按默认方式编译可能塞不进单片机中。为此,要在 Options for Targets 中 Target一栏下, Code Generation 卡中做如下设置,启用MicroLIB:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3010
3010

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









