






1,安装python
2,pip安装
DrissionPage
DataRecorder
3,创建一个pc_maoyan.py主程序入口及数据输出的data.csv
from DrissionPage import ChromiumPage
from DataRecorder import Recorder
page=ChromiumPage()
recorder=Recorder('data.csv')
page.get('https://www.maoyan.com/board/4')
for _ in range(10):
for mov in page.eles('t:dd'):
num=mov('t:i').text
score=mov('.score').text
title=mov('@data-act=boarditem-click').attr('title')
star=mov('.star').text
time=mov('.releasetime').text
recorder.add_data((num,title,star,time,score))
btn=page('下一页',timeout=2)
if btn:
btn.click()
page.wait.load_start()
else:
break
recorder.record()
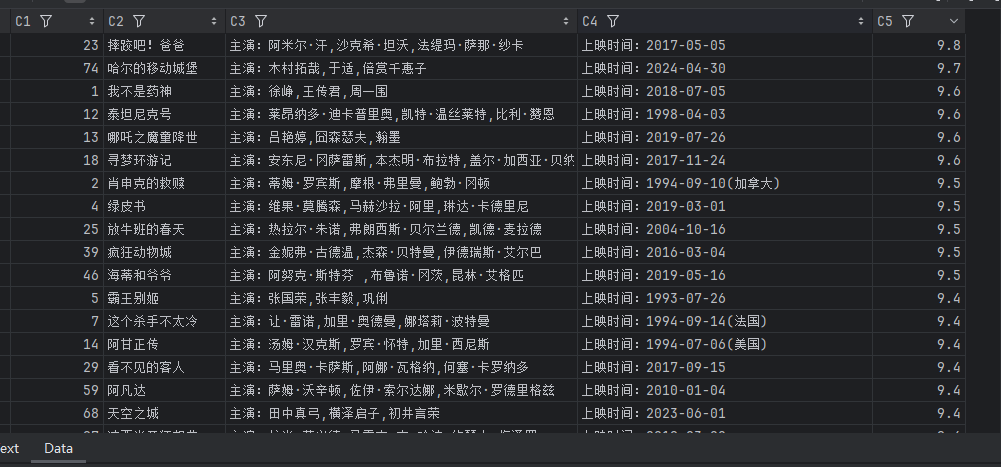
4,运行主程序,爬取的猫眼电影的数据就显示在我们的data.csv中啦,这就是前十页的100个高分电影列表啦

data.csv中的数据
代码的实现是意外发现的,我们应该记住意外发现的美好
















 361
361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











