







汇编实现UART功能
一、UART硬件知识
1.1 串口的硬件介绍
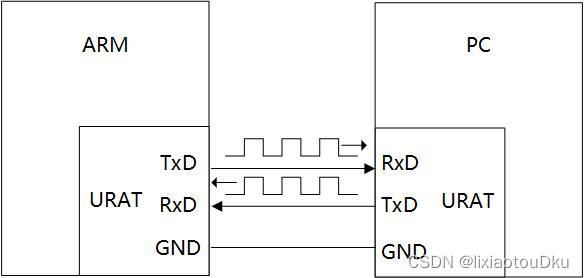
UART的全称是Universal Asynchronous Receiver and Transmitter,即异步发送和接收。
串口因为结构简单、稳定可靠,广受欢迎。
通过三根线即可,发送、接收、地线。
串口在嵌入式中用途非常的广泛,主要的用途有:
- 打印调试信息;
- 外接各种模块:GPS、蓝牙;
1.2 串口的参数
- 波特率:一般选波特率都会有9600,19200,115200等选项。其实意思就是每秒传输这么多个比特位数(bit)。
- 起始位:先发出一个逻辑”0”的信号,表示传输数据的开始。
- 数据位:可以是5~8位逻辑”0”或”1”。如ASCII码(7位),扩展BCD码(8位)。小端传输。
- 校验位:数据位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验数据传送的正确性。
- 停止位:它是一个字符数据的结束标志。
举例:
怎么发送一字节数据,比如‘A‘?
‘A’的ASCII值是0x41,二进制就是01000001,怎样把这8位数据发送给PC机呢?
-
双方约定好波特率(每一位占据的时间);
-
规定传输协议
- 原来是高电平,ARM拉低电平,保持1bit时间;
- PC在低电平开始处计时;
- ARM根据数据依次驱动TxD的电平,同时PC依次读取RxD引脚电平,获得数据;
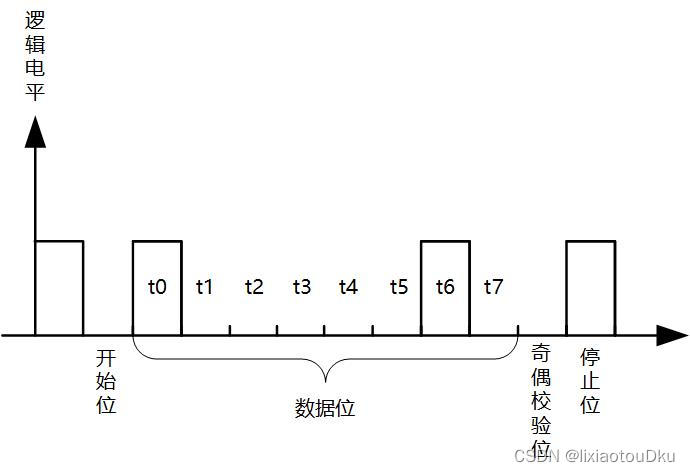
前面图中提及到了逻辑电平,也就是说代表信号1的引脚电平是人为规定的。
如下图是TTL/CMOS逻辑电平下,传输‘A’时的波形:
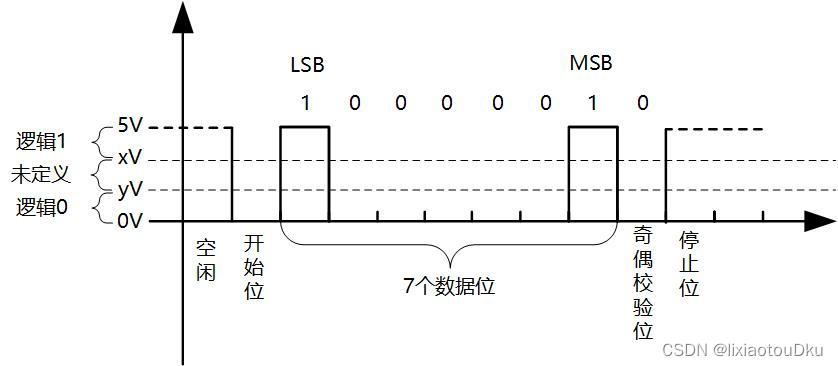
在xV至5V之间,就认为是逻辑1,在0V至yV之间就为逻辑0。
如图是RS-232逻辑电平下,传输‘A’时的波形:
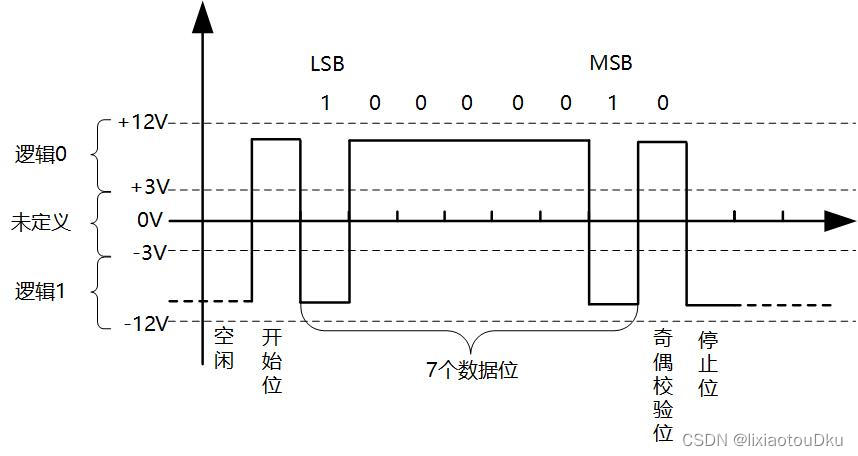
在-12V至-3V之间,就认为是逻辑1,在+3V至+12V之间就为逻辑0。
RS-232的电平比TTL/CMOS高,能传输更远的距离,在工业上用得比较多。
市面上大多数ARM芯片都不止一个串口,一般使用串口0来调试,其它串口来外接模块。
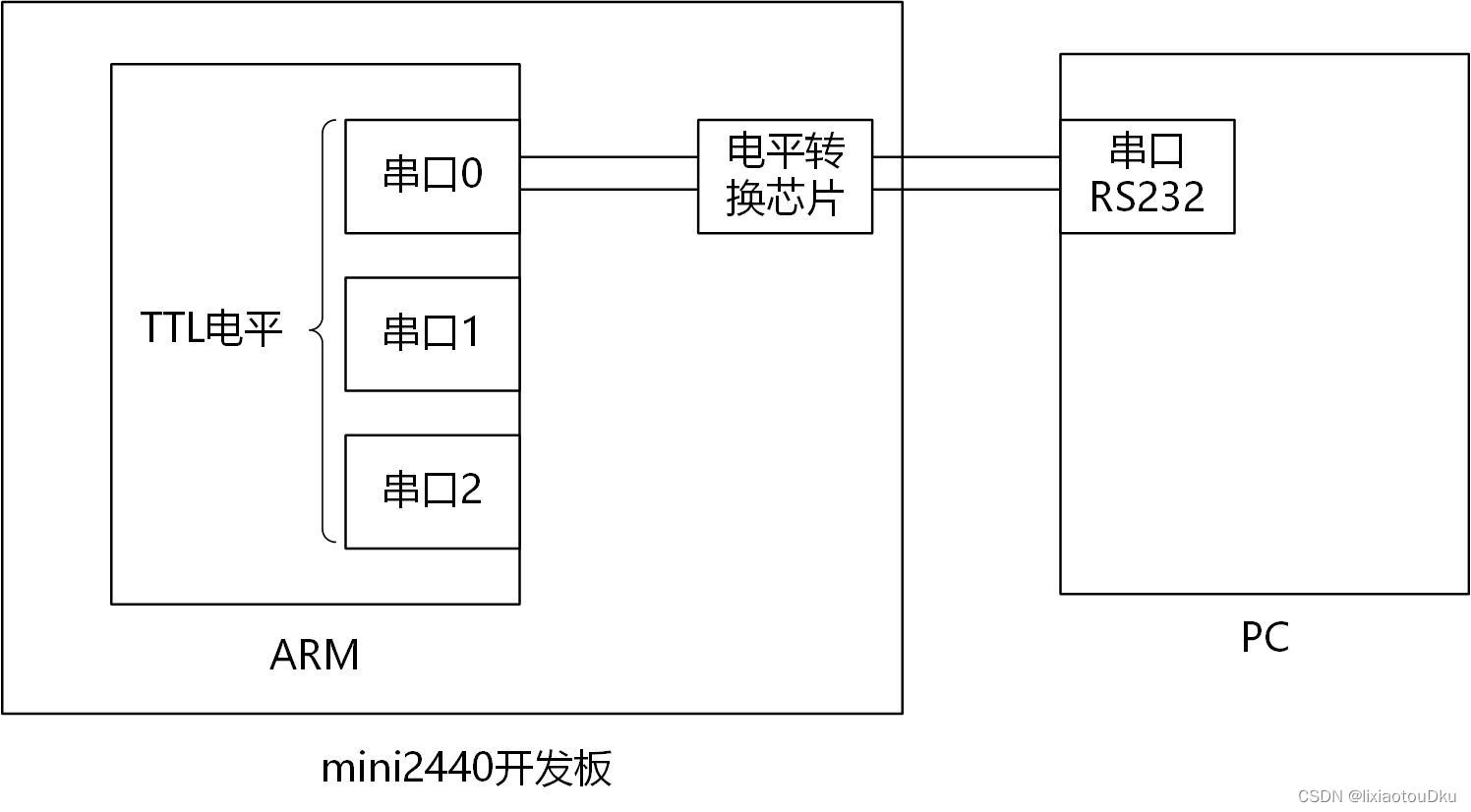
1.3 串口电平
ARM芯片上得串口都是TTL电平的,通过板子上或者外接的电平转换芯片,转成RS232接口,连接到电脑的RS232串口上,实现两者的数据传输。
现在的电脑越来越少有RS232串口的接口,当USB是几乎都有的。因此使用USB串口芯片将ARM芯片上的TTL电平转换成USB串口协议,即可通过USB与电脑数据传输。
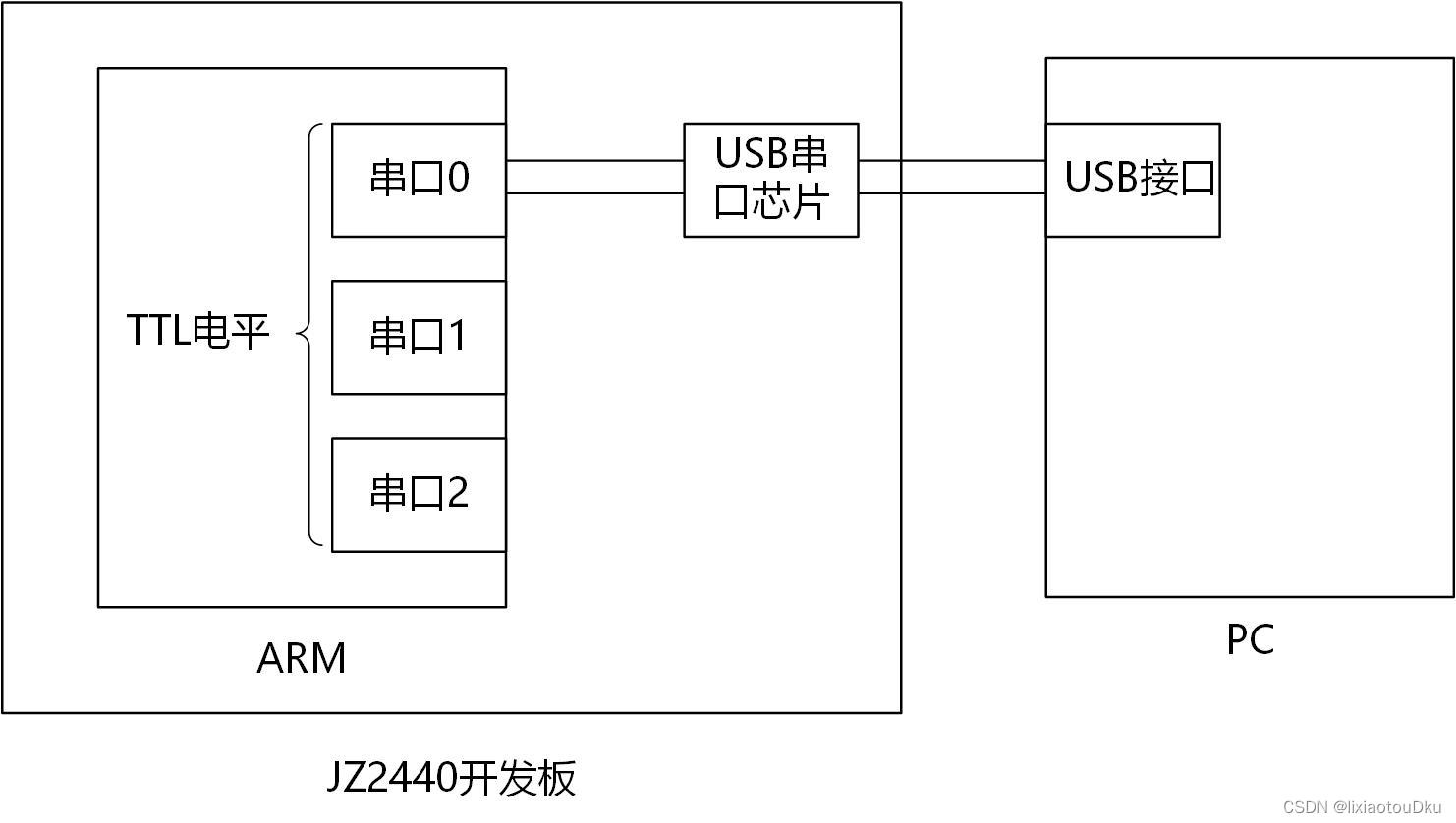
上面的两种方式,对ARM芯片的编程操作都是一样的。
1.4 串口内部结构
ARM芯片是如何发送/接收数据?
如图所示串口结构图:
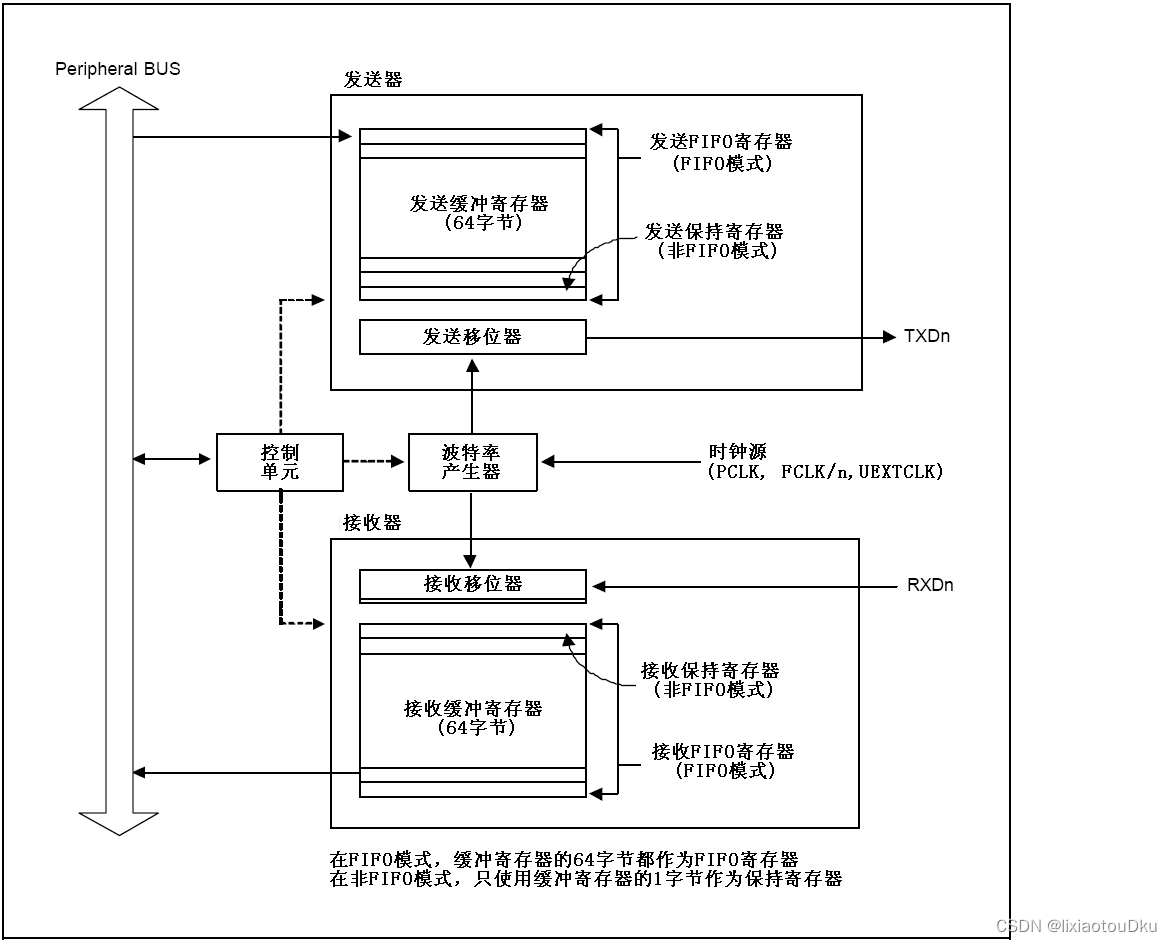
要发送数据时,CPU控制内存要发送的数据通过FIFO传给UART单位,UART里面的移位器,依次将数据发送出去,在发送完成后产生中断提醒CPU传输完成。
接收数据时,获取接收引脚的电平,逐位放进接收移位器,再放入FIFO,写入内存。在接收完成后产生中断提醒CPU传输完成。
1.5 波特率传输数据计算
115200波特率,1s中能传输多少数据?
如何表示:115200,8n1
8位数据位,没有校验位,1位停止位
计算:
每1bit数据传输的时间:1 / 115200
传输1Byte数据需要传输10bit(start,data,stop)
时间为:t = 10 / 115200
每秒能传输的字节Byte为: 1 / t = 115200 / 10 = 11520(Byte)
二、UART编程
2.1 串口编程的步骤
- 看原理图确定引脚
有很多串口,使用哪一个?看原理图确定
- 配置引脚为UART功能
至少用到发送、接收引脚:txd、rxd
需要把这些引脚配置为UART功能,并使能UART模块
- 设置串口参数
- 有哪些参数?
- 波特率
- 数据位
- 校验位
- 停止位
- 示例:
比如15200,8n1表示波特率为115200,8个数据位,没有校验位,1个停止位
- 根据状态寄存器读写数据
- 肯定有一个数据寄存器,程序把数据写入,即刻通过串口向外发送数据
- 肯定有一个数据寄存器,程序读取这个寄存器,就可以获得先前接收到的数据
- 很多有状态寄存器
- 判断数据是否发送出去?是否发送成功?
- 判断是否接收到了数据?
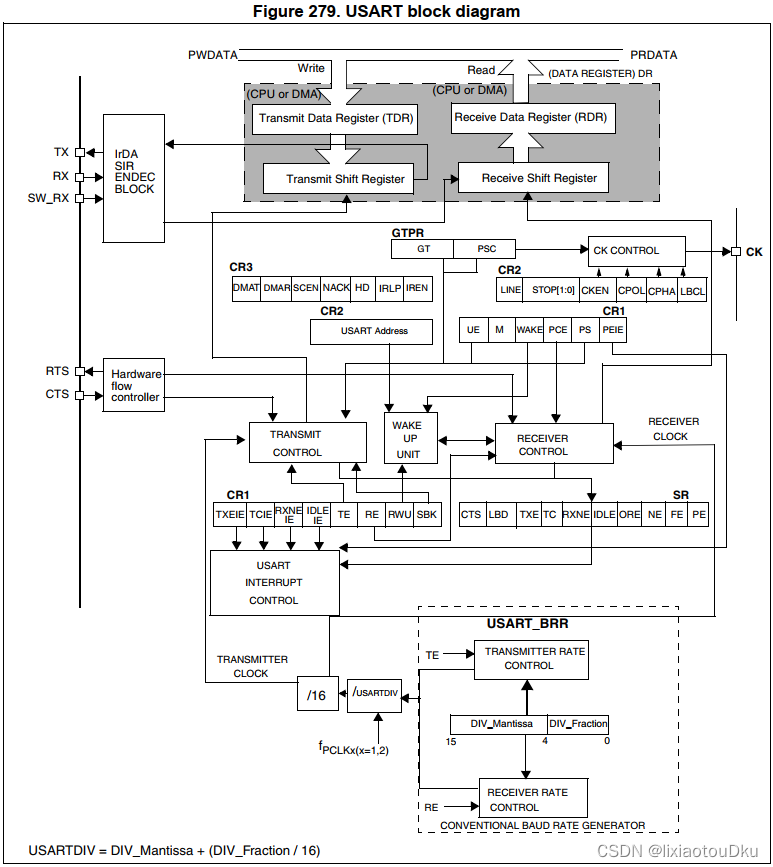
2.2 STM32F103串口框架
各类芯片的UART框图都是类似的,当设置好UART后,程序读写数据寄存器就可以接收、发送数据了。
2.3 STM32F103串口操作
2.3.1 确定引脚
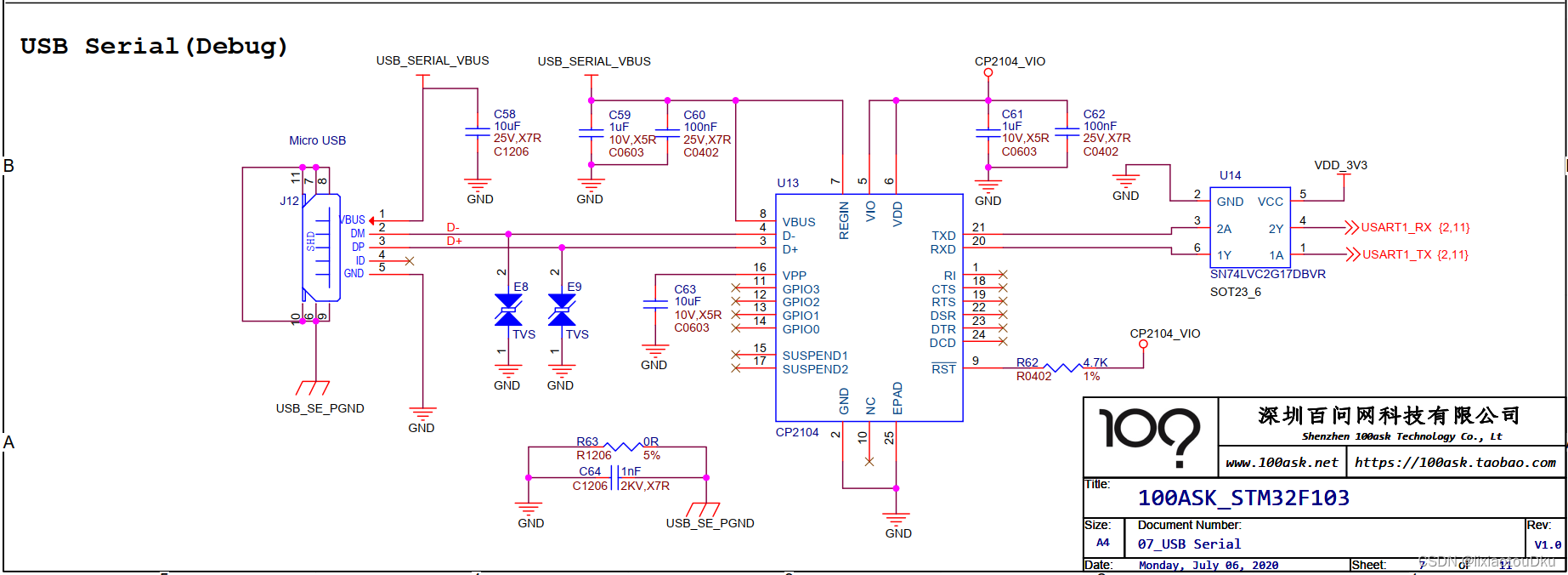
以100askSTM32F103为例:
- 100ASM STM32F103的USART1接到一个USB串口芯片,然后就可以通过USB线连接电脑了
- 原理图如下

2.3.2 配置引脚为UART功能
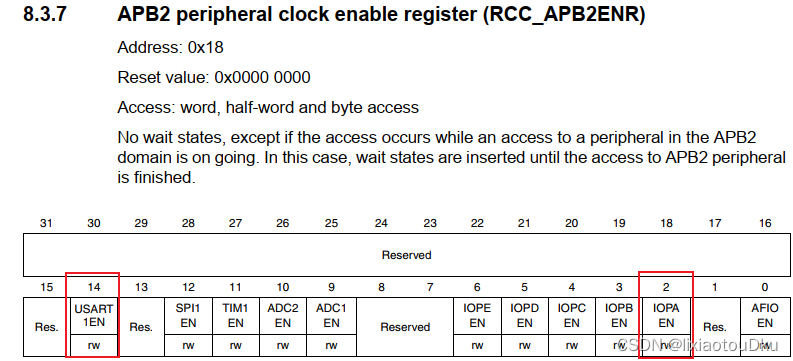
1. 使能GPIOA/USART1模块
需要设置GPIOA的寄存器,选择引脚功能:所以要使能GPIOA模块。
GPIOA模块、USART1模块的使能都是在同一个寄存器里实现。
address: 0x40021000 + 0x18
使能GPIOA和USART1:将bit2 和bit14 置1
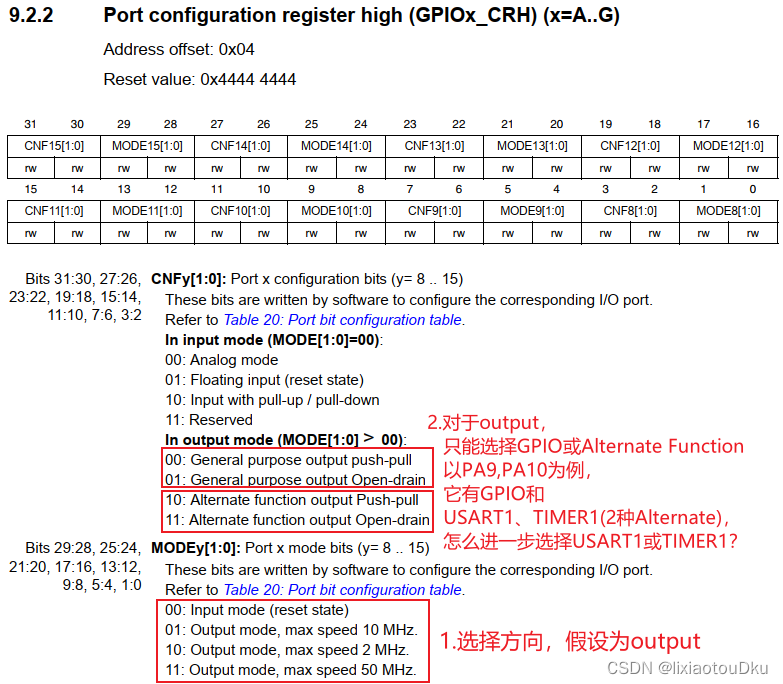
2. 配置引脚功能
从上图可以知道,PA9、PA10有三种功能:GPIO、USART1、TIMER1。
address:0x40010800 + 0x04
- 选择端口为输出模式
PA9为TX,:选择output为输出方向;输出模式为:复用推挽输出
PA10为RX:选择input为输入方向,输出模式为:浮空输入- 如何设置bit位:
由于有重置值,所以要事先对需要设置的为进行清除
PA9:清除bit4,bit5和bit6,bit7,分别设置为01 ;10
PA10:清除bit8,bit9和bit10,bit11,分别设置为00;10
2.3.3 设置串口参数
1. 设置波特率
波特率算公式:

USARTDIV由整数部分、小数部分组成,计算公式如下:
USARTDIV = DIV_Mantissa + (DIV_Fraction / 16)
DIV_Mantissa和DIV_Fraction来自USART_BRR寄存器,如下图:
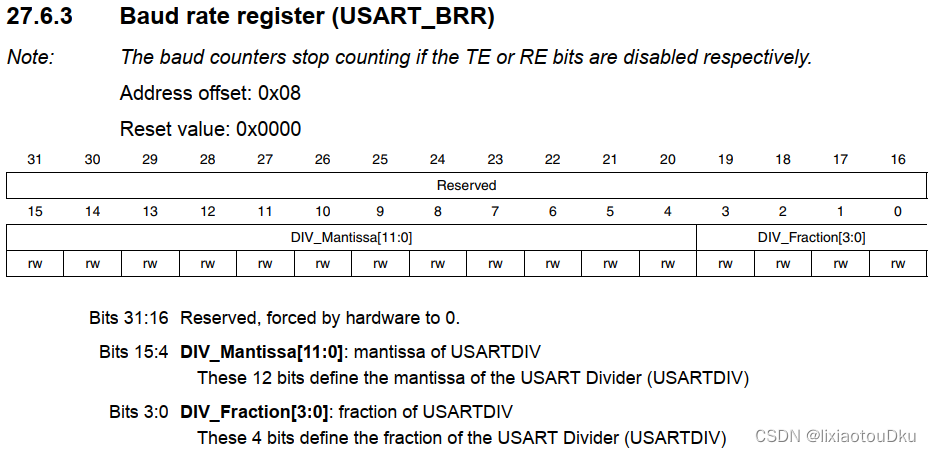
波特率计算过程:
- 115200 = 8000000/16/USARTDIV
* USARTDIV = 4.34
* DIV_Mantissa = 4
* DIV_Fraction / 16 = 0.34
* DIV_Fraction = 0.34*16 = 5
* 真实波特率:
* DIV_Fraction / 16 = 5/16 = 0.3125
* USARTDIV = DIV_Mantissa + DIV_Fraction/16 = 4.3125
* baudrate = 8000000 / 16 /4.3125 = 115942
*/
2. 设置数据格式
比如数据位设置为8,无校验位,停止位设置为1。需要设置2个寄存器。
通过定义结构体指向USART1的基地址,0x4001 3800;然后用指针来操作各个寄存器进行数据位的设置,及对数据的写、读操作
- USART1_CR1:用来设置数据位、校验位,使能USART
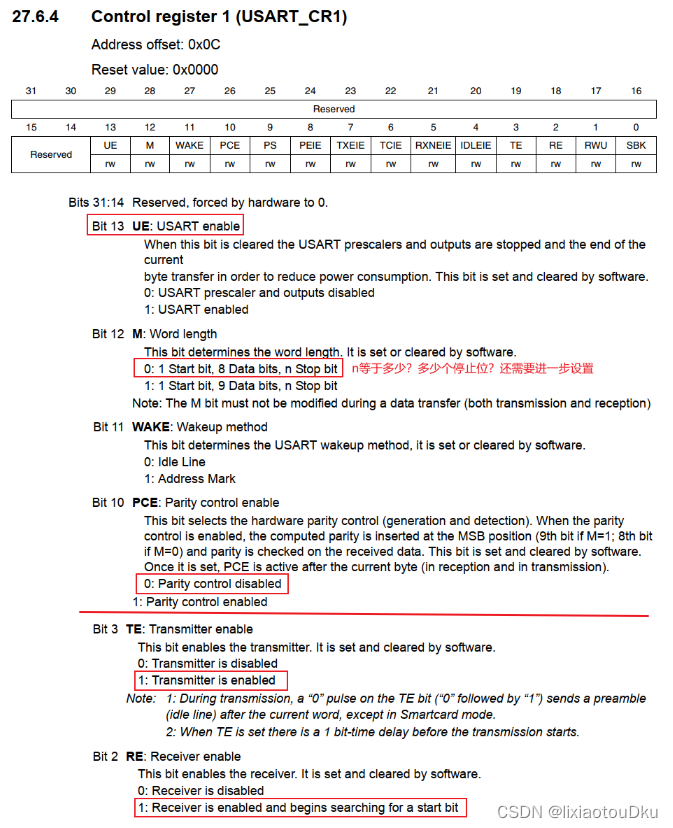
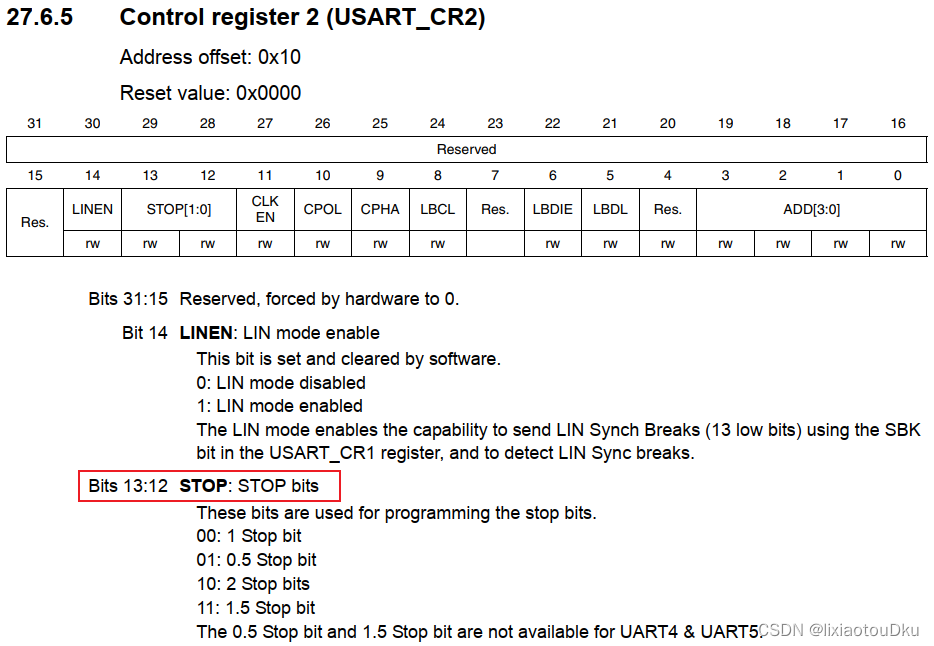
- USART_CR2:用来设置停止位
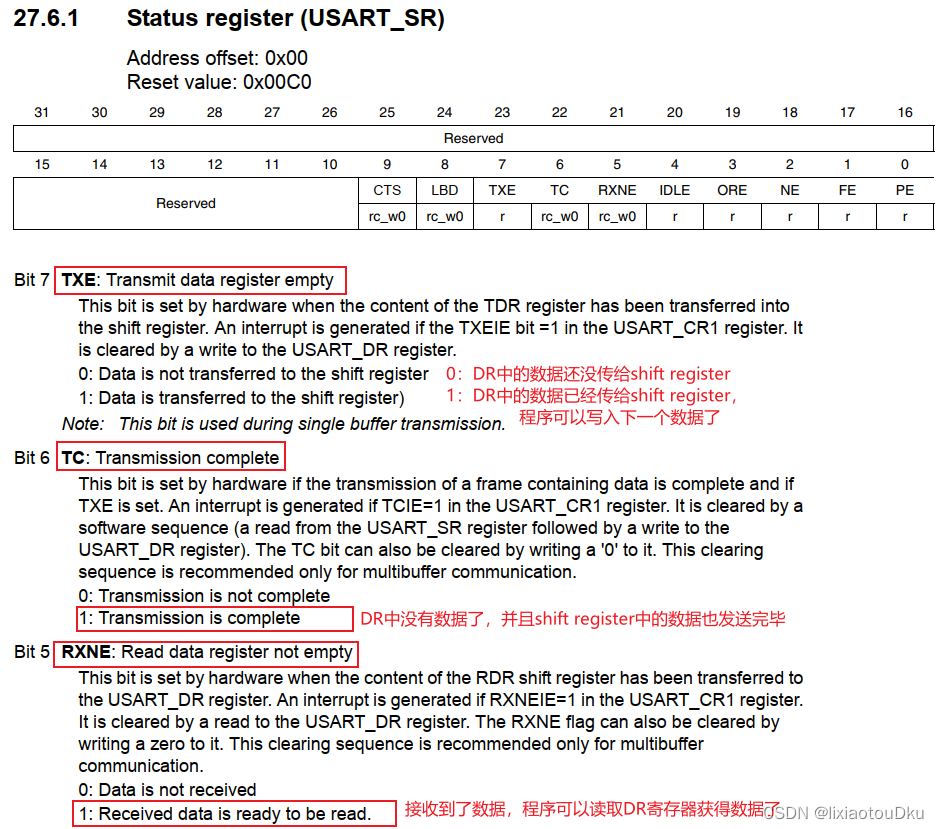
2.3.4 根据状态寄存器读写数据
- 状态寄存器
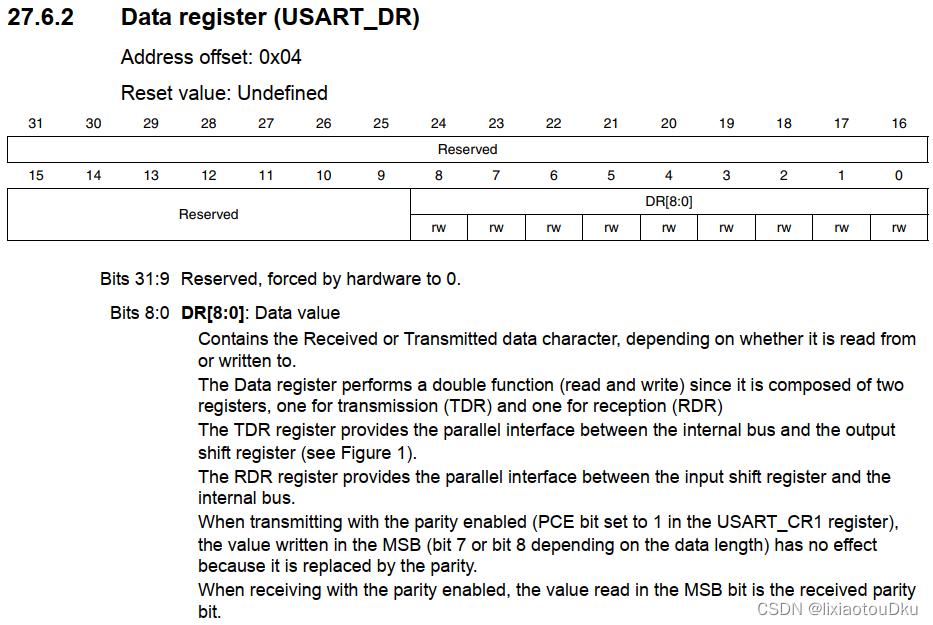
- 数据寄存器
写、读这个DR寄存器,就可:发送、读取串口数据,如下图:
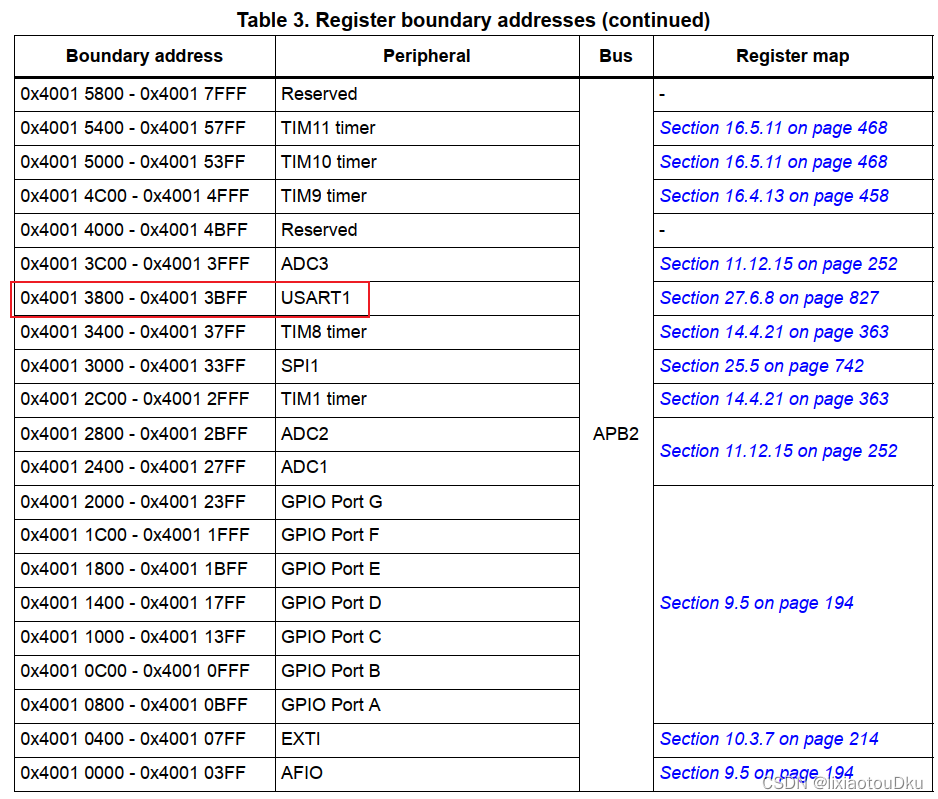
2.3.5 USART1的寄存器地址
- 基地址
- USART寄存器,用结构体来表示比较方便:
typedef unsigned int uint32_t;
typedef struct
{
volatile uint32_t SR; /*!< USART Status register, Address offset: 0x00 */
volatile uint32_t DR; /*!< USART Data register, Address offset: 0x04 */
volatile uint32_t BRR; /*!< USART Baud rate register, Address offset: 0x08 */
volatile uint32_t CR1; /*!< USART Control register 1, Address offset: 0x0C */
volatile uint32_t CR2; /*!< USART Control register 2, Address offset: 0x10 */
volatile uint32_t CR3; /*!< USART Control register 3, Address offset: 0x14 */
volatile uint32_t GTPR; /*!< USART Guard time and prescaler register, Address offset: 0x18 */
} USART_TypeDef;
USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
三、代码实现UART
//start.s 启动文件
PRESERVE8
THUMB
; Vector Table Mapped to Address 0 at Reset
AREA RESET, DATA, READONLY
EXPORT __Vectors
__Vectors DCD 0
DCD Reset_Handler ; Reset Handler
AREA |.text|, CODE, READONLY
; Reset handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT main
LDR sp, =(0x20000000+0x10000)
BL main
ENDP
END
// uart.c 串口功能实现
#include "uart.h"
typedef unsigned int uint32_t;
typedef struct
{
volatile uint32_t SR; /*!< USART Status register, Address offset: 0x00 */
volatile uint32_t DR; /*!< USART Data register, Address offset: 0x04 */
volatile uint32_t BRR; /*!< USART Baud rate register, Address offset: 0x08 */
volatile uint32_t CR1; /*!< USART Control register 1, Address offset: 0x0C */
volatile uint32_t CR2; /*!< USART Control register 2, Address offset: 0x10 */
volatile uint32_t CR3; /*!< USART Control register 3, Address offset: 0x14 */
volatile uint32_t GTPR; /*!< USART Guard time and prescaler register, Address offset: 0x18 */
} USART_TypeDef;
void uart_Init(void)
{
volatile unsigned int *pReg;
USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
/* 1.使能GPIOA/USART1模块 */
pReg = (unsigned int *)(0x40021000 + 0x18);
*pReg |= (1 << 2) | (1 << 14);
/* 2.配置引脚功能,PA9,PA10
* GPIOA_CRH = 0x40010800 + 0x04
*/
pReg = (unsigned int *)(0x40010800 + 0x04);
/* PA9(USART1_TX) */
*pReg &= ~((3<<4) | (3<<6));
*pReg |= (1<<4) | (2<<6);
/* PA10(USART1_RX) */
*pReg &= ~((3<<8) | (3<<10));
*pReg |= (0<<8) | (1<<10);
/* 3.设置波特率
* 115200 = 8000000/16/USARTDIV
* USARTDIV = 4.34
* DIV_Mantissa = 4
* DIV_Fraction / 16 = 0.34
* DIV_Fraction = 0.34*16 = 5
* 真实波特率:
* DIV_Fraction / 16 = 5/16 = 0.3125
* USARTDIV = DIV_Mantissa + DIV_Fraction/16 = 4.3125
* baudrate = 8000000 / 16 /4.3125 = 115942
*/
#define DIV_Mantissa 4
#define DIV_Fraction 5
usart1->BRR = (DIV_Mantissa<<4) | (DIV_Fraction);
/* 4.设置数据位格式 8n1 */
usart1->CR1 = (1<<13) | (0<<12) | (0<<10) | (1<<3) | (1<<2); /* 数据位 */
usart1->CR2 &= ~(3 << 13); /* 停止位 */
}
int getchar(void)
{
USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
while ((usart1->SR & (1<<5)) == 0); /* RXEN = 1 */
return usart1->DR;
}
int putchar(char c)
{
USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
while ((usart1->SR & (1<<7)) == 0); /* TXE = 1 */
usart1->DR = c;
return c;
}
// uart.h
#ifndef _UART_H_
#define _UART_H_
void uart_Init(void);
int getchar(void);
int putchar(char c);
#endif
// main.c
#include "uart.h"
void delay(int d)
{
while(d--);
}
int main(void)
{
char c;
uart_Init();
putchar('1');
putchar('0');
putchar('0');
putchar('a');
putchar('s');
putchar('k');
putchar('\n');
putchar('\r');
while (1)
{
c = getchar();
putchar(c);
putchar(c + 1);
}
return 0;
}
输出结果:















 660
660











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









